
平面机构结构分析.ppt

胜利****实阿

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共56页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

平面机构结构分析.ppt
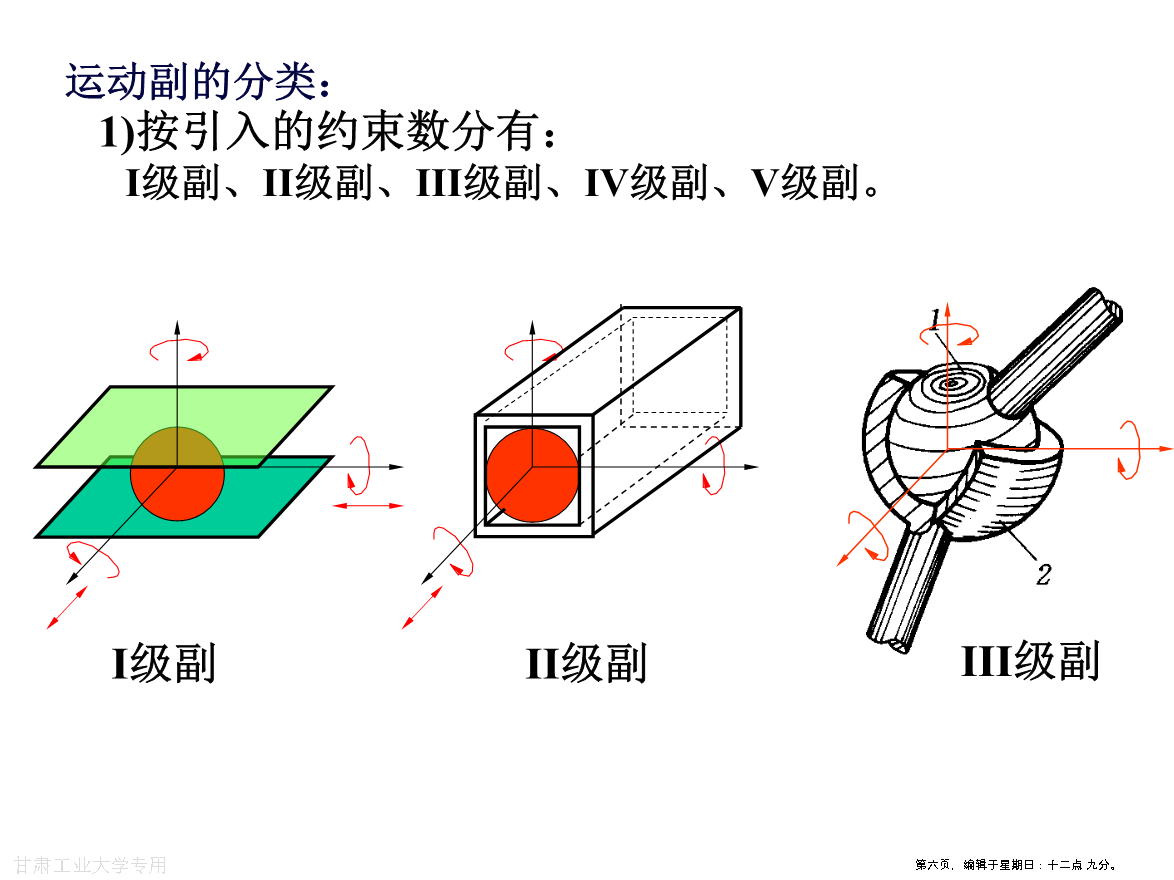
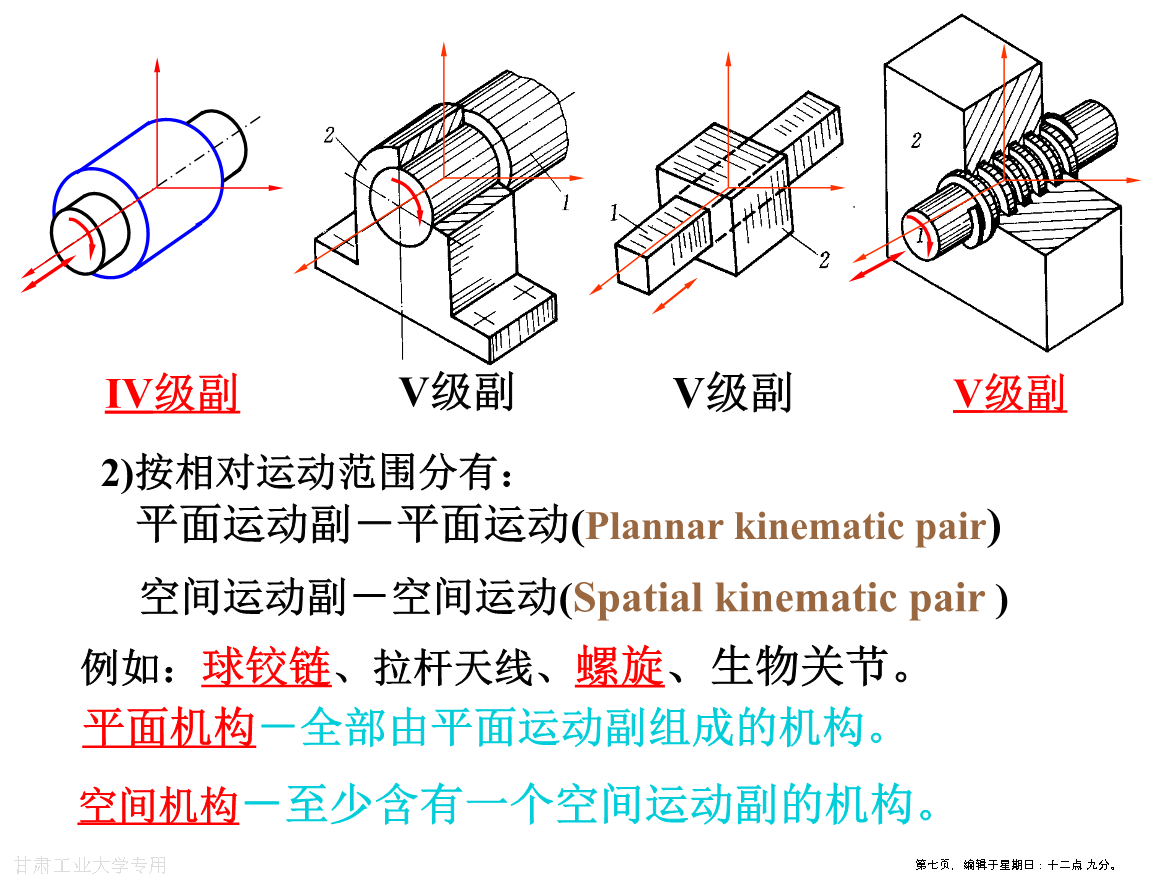
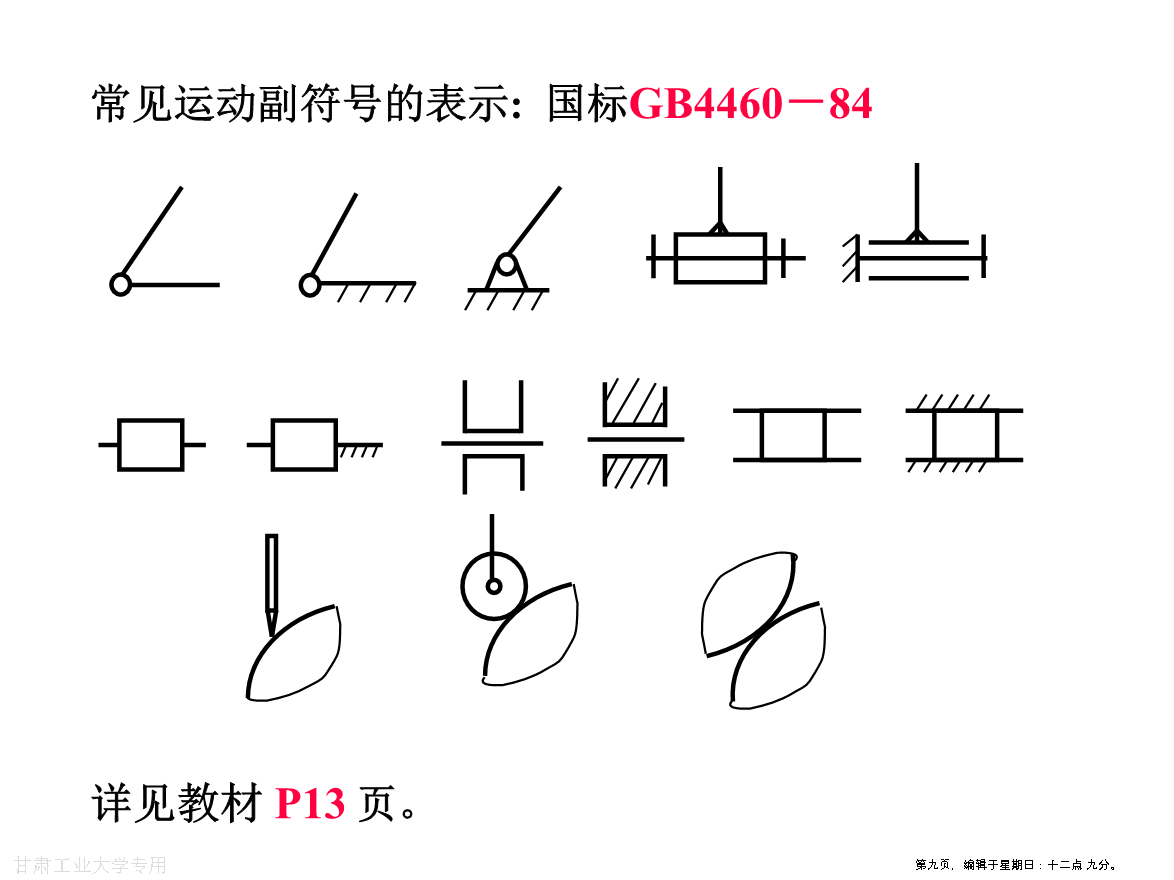
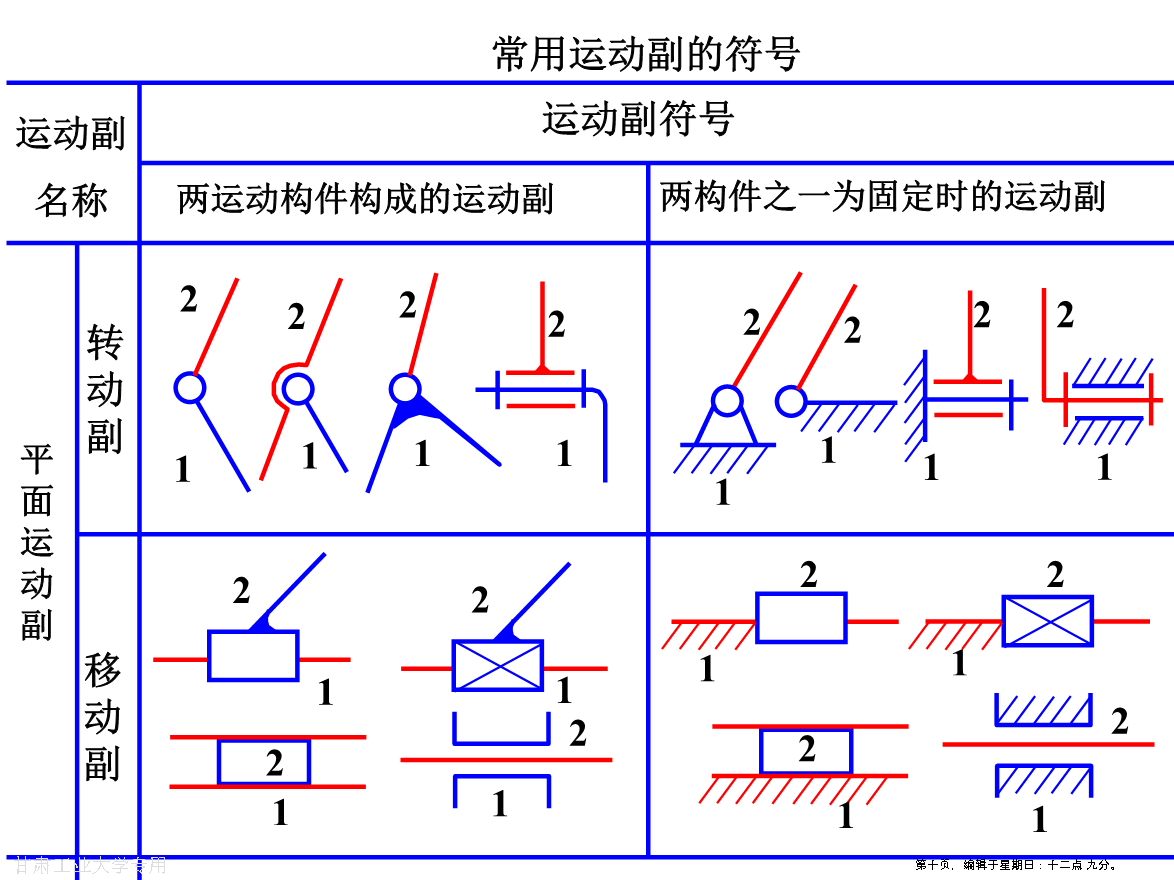
章平面机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成2)按相对运动范围分有:平面运动副-平面运动(Plannarkinematicpair)3)按运动副元素分有:①高副-点、线接触,应力高(highpair)常见运动副符号的表示:国标GB4460-84常用运动副的符号平面高副构件的表示方法:一般构件的表示方法注意事项:常用机构运动简图符号机构运动简图应满足的条件:1.构件数目与实际相同§2-3平面机构自由度的计算及机构运动确定的条件运动副自由度数约束数回转副1(θ)+2(x,y)=3活动
平面机构结构分析.ppt
第二章平面机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成2)按相对运动范围分有:平面运动副-平面运动(Plannarkinematicpair)3)按运动副元素分有:①高副-点、线接触,应力高(highpair)常见运动副符号的表示:国标GB4460-84常用运动副的符号平面高副构件的表示方法:一般构件的表示方法三副构件注意事项:若干常用机构运动简图符号链传动机构运动简图应满足的条件:1.构件数目与实际相同甘肃工业大学专用1§2-3平面机构自由度的计算及机构运动确定的条件运动副自由度数约
平面机构的结构分析.pdf
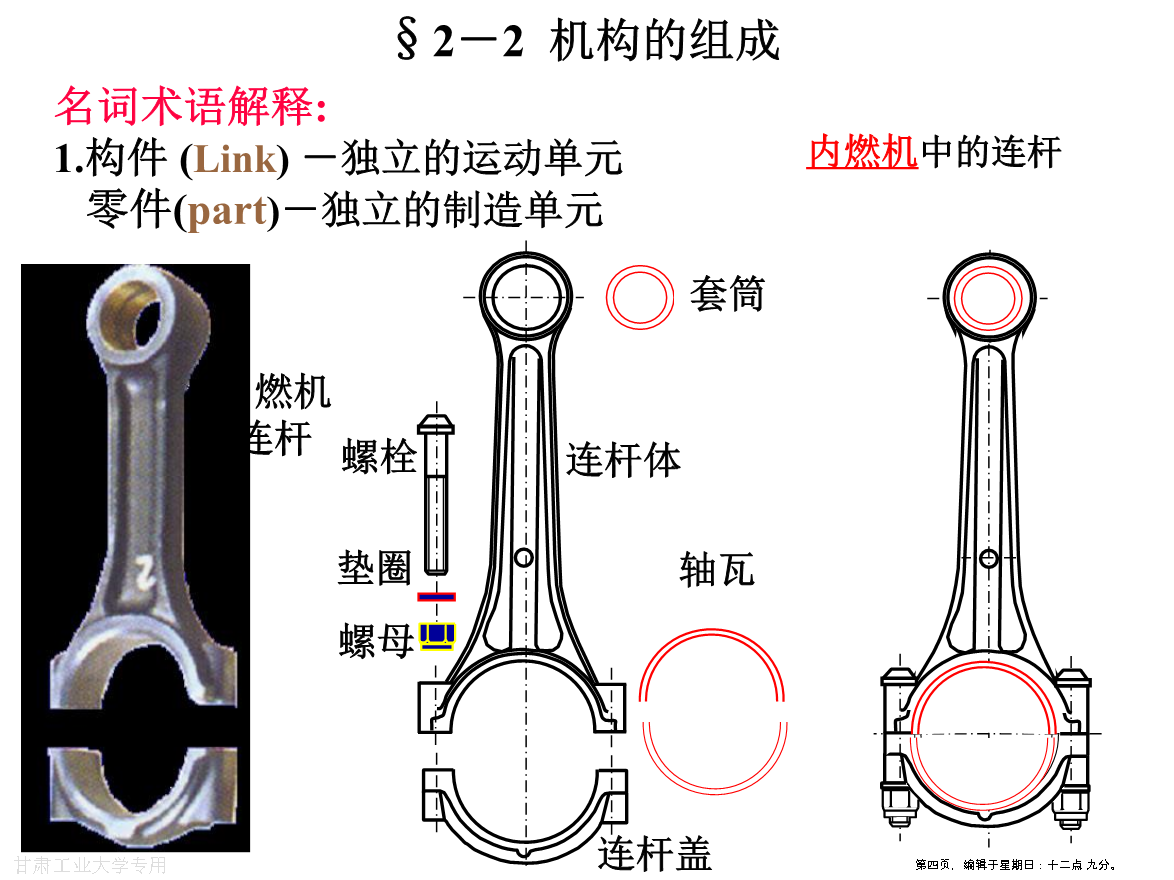
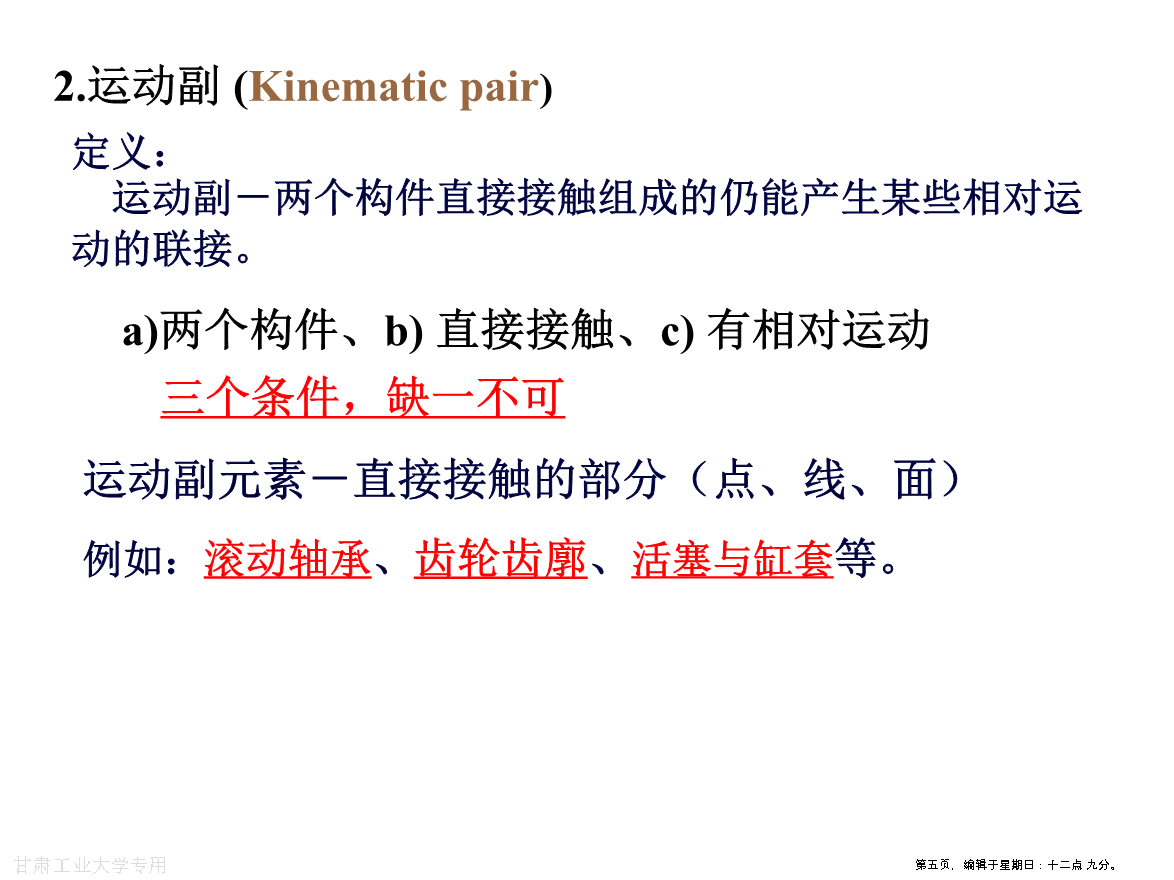
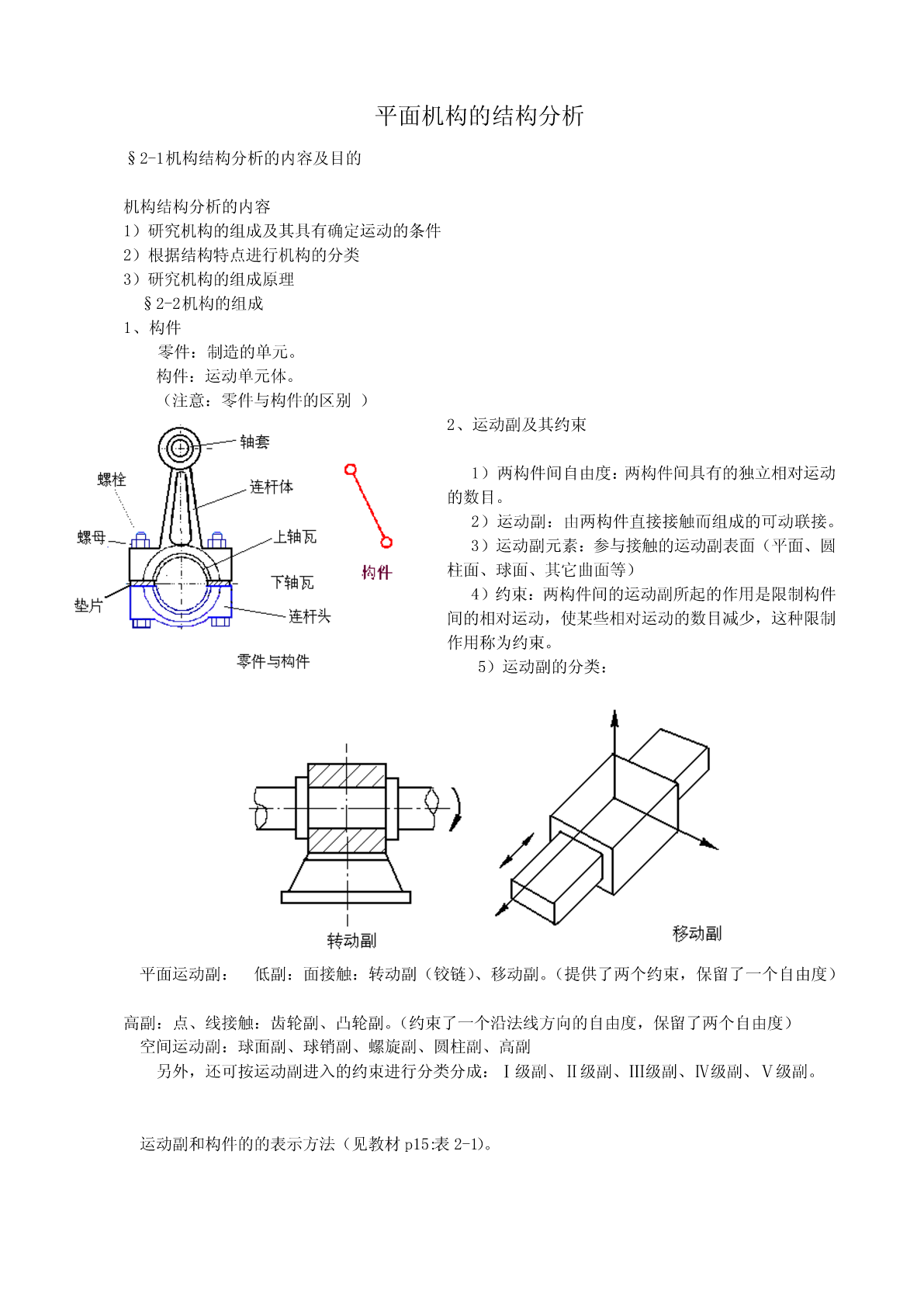
平面机构的结构分析§2-1机构结构分析的内容及目的机构结构分析的内容1)研究机构的组成及其具有确定运动的条件2)根据结构特点进行机构的分类3)研究机构的组成原理§2-2机构的组成1、构件零件:制造的单元。构件:运动单元体。(注意:零件与构件的区别)2、运动副及其约束1)两构件间自由度:两构件间具有的独立相对运动的数目。2)运动副:由两构件直接接触而组成的可动联接。3)运动副元素:参与接触的运动副表面(平面、圆柱面、球面、其它曲面等)4)约束:两构件间的运动副所起的作用是限制构件间的相对运动,使某些相对运动
平面机构的结构分析.ppt
平面机构的结构分析主要内容:1)平面机构运动简图的绘制2)平面机构自由度的计算及机构具有确定运动的条件3)机构的组成原理及结构分析§1-1.研究机构结构的目的§1-2.运动副、运动链和机构运动副的分类:也可将运动副分为平面运动副和空间运动副。1)平面运动副:组成运动副两构件间作相对平面运动,如转动副、移动副、凸轮副、齿轮副。2)空间运动副:组成运动副两构件间作相对空间运动。如螺旋副,球面副。自由度:构件所具有的独立运动的数目运动副的约束特点:二、运动链判别运动副三、机构§3-3.平面机构运动简图组成:线条
平面机构结构分析.ppt
第二章平面机构的结构分析§2-1机构结构分析的内容及目的§2-2机构的组成2)按相对运动范围分有:平面运动副-平面运动(Plannarkinematicpair)3)按运动副元素分有:①高副-点、线接触,应力高(highpair)常见运动副符号的表示:国标GB4460-84常用运动副的符号平面高副构件的表示方法:一般构件的表示方法三副构件注意事项:若干常用机构运动简图符号链传动机构运动简图应满足的条件:1.构件数目与实际相同甘肃工业大学专用1§2-3平面机构自由度的计算及机构运动确定的条件运动副自由度数约