
基于单片机设计智能避障小车.doc

胜利****实阿


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单片机设计智能避障小车.doc
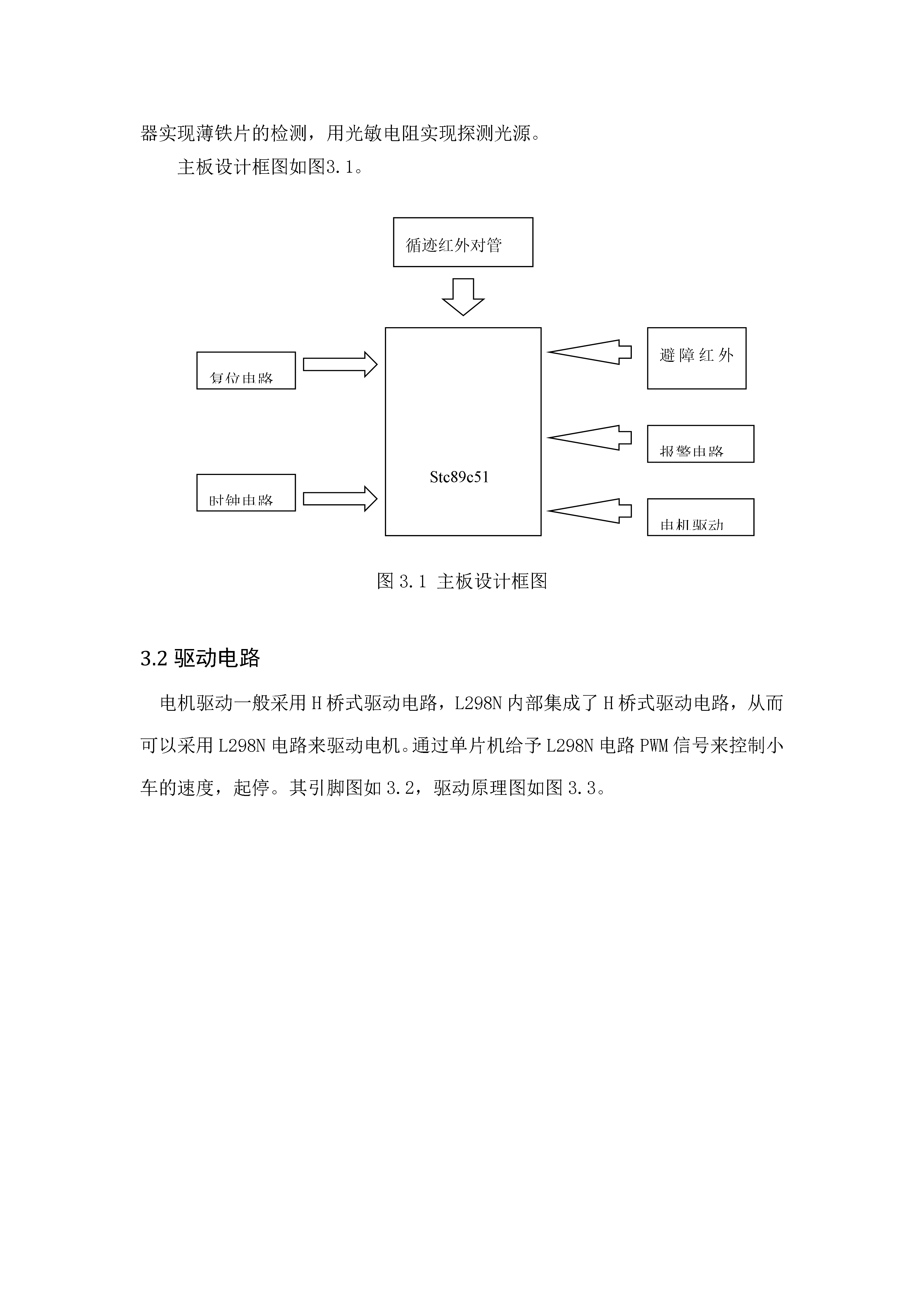
单片机设计智能避障小车摘要运用红外对管检测黑线与障碍物,并以STC89C51单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。其中小车驱动由L298N驱动电路完毕,速度由单片机输出的PWM波控制。本文一方面介绍了智能车的发展前景,接着介绍了该课题设计构想,各模块电路的选择及其电路工作原理,最后对该课题的设计过程进行了总结与展望并附带各个模块的电路原理图,和本设计实物图,及完整的C语言程序。关键词:智能小车;51单片机;L298N;红外避障;寻迹行驶abstractUsinginfra

基于单片机的智能小车设计(红外避障).doc
轮式移动机器人的设计报告轮式移动机器人的设计报告单片机系统课程设计智能小车(避障及循迹)的设计学院:班级:姓名:学号:同组成员:指导老师:日期:摘要智能作为现代社会的新生产物,是未来的发展的一个重要方向,它可以按照预定的模式在特定的环境里自动的运作,无需人为管理,便可以完成预期目标。本设计主要体现多功能小车的智能模式,设计中的理论方案、分析方法及特色与创新点等对智能化机器人,智能家用电器等自动半自动机器人的设计与普及有一定的参考意义.整个智能小车设计主要以单片机为控制核心,通过红外遥控实现小

基于单片机的智能小车设计(红外避障).doc
轮式移动机器人的设计报告轮式移动机器人的设计报告单片机系统课程设计智能小车(避障及循迹)的设计学院:班级:姓名:学号:同组成员:指导老师:日期:摘要智能作为现代社会的新生产物,是未来的发展的一个重要方向,它可以按照预定的模式在特定的环境里自动的运作,无需人为管理,便可以完成预期目标。本设计主要体现多功能小车的智能模式,设计中的理论方案、分析方法及特色与创新点等对智能化机器人,智能家用电器等自动半自动机器人的设计与普及有一定的参考意义.整个智能小车设计主要以单片机为控制核心,通过红外遥控实现小

基于单片机的智能避障小车.docx
基于单片机的智能避障小车随着科技的不断进步,人们对于自动化的需求越来越高,智能避障小车作为一种自动化移动装置越来越受到人们的重视。本文将通过介绍智能避障小车的原理、设计流程、以及实验结果等方面,详细地阐述基于单片机的智能避障小车的实现方法和具体应用。一、智能避障小车简介智能避障小车是一种基于单片机的自动化移动装置。在不用人为干预的情况下,它能够通过自身的传感器实时获取环境中的障碍物信息,并根据预设的路径和规则来自主地避开障碍物,实现自主导航的功能。智能避障小车主要包括以下硬件组成部分:单片机、电机驱动模块

基于Arduino的智能避障小车的设计.docx
基于Arduino的智能避障小车的设计基于Arduino的智能避障小车设计摘要:随着科技的不断发展,智能化设备在我们生活中的应用越来越广泛。本文基于Arduino开发平台,设计并实现了一款智能避障小车。该小车通过超声波传感器探测前方障碍物,并利用马达驱动模块控制小车行进方向,实现自动避障功能。通过该设计,我们可以看到Arduino在物联网和智能控制领域中的应用潜力。1.引言智能避障小车是一种基于传感器技术和智能控制算法的智能车辆,能够根据环境中的障碍物进行自主导航和避障。Arduino开发平台是开源硬件和