
清洁系统及其控制方法.pdf

是你****深呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

清洁系统及其控制方法.pdf
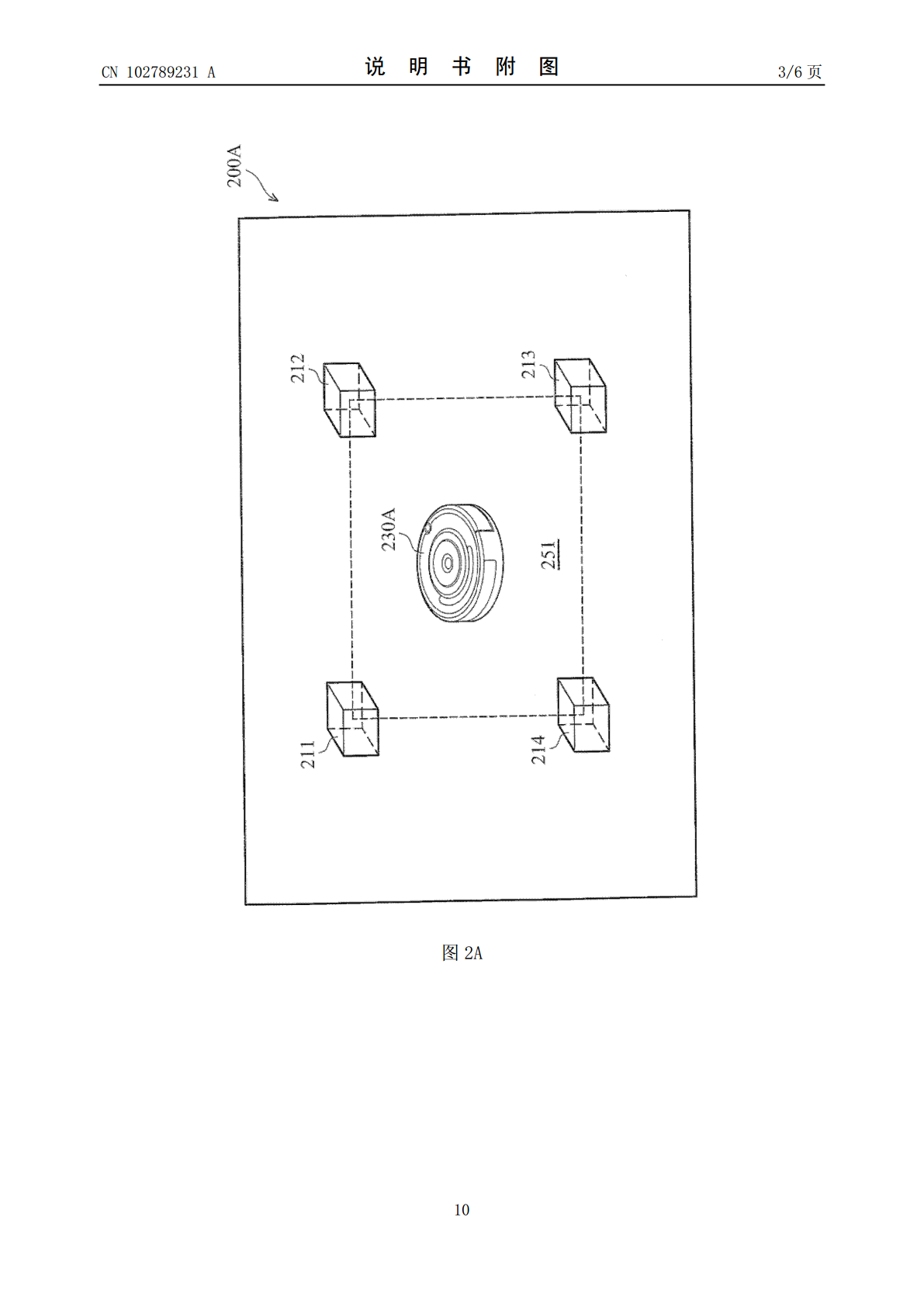
一种清洁系统,包括至少一标示体及一清洁机器人。清洁机器人检测并记录标示体的位置,用以产生一记录结果。清洁机器人具有一锁定功能。当锁定功能被启动时,清洁机器人便根据记录结果,进行清洁动作,其中就算移除标示体,清洁机器人仍可根据标示体未被移除前的位置而进行清洁动作。

自动清洁系统、基站及其控制方法.pdf
本发明涉及一种自动清洁系统,所述自动清洁系统包括清洁机器人和基站,所述清洁机器人包括主体和擦拭板;擦拭板用于供擦拭件可替换地抵附形成擦拭面,以当所述清洁机器人在工作表面上移动时擦拭工作表面;所述基站包括:擦拭件安装位,供擦拭板安装擦拭件;所述自动清洁系统还包括:操作模块,被配置为作用于所述擦拭板和/或擦拭件,使得所述擦拭件沿预设方向安装于所述擦拭板;其中所述预设方向为垂直于所述擦拭面的方向。

用于烟机的清洁系统及其控制方法以及烟机.pdf
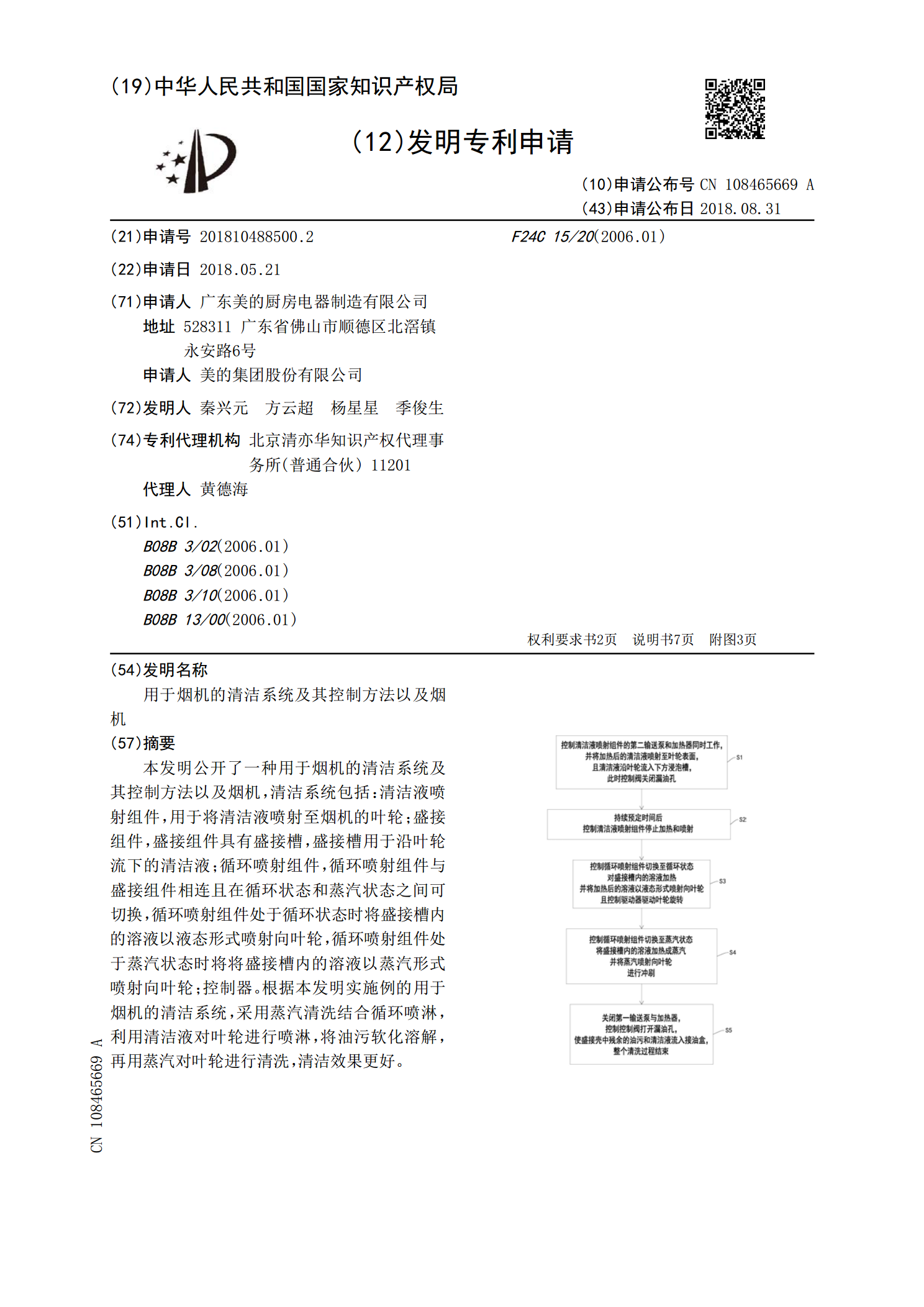
本发明公开了一种用于烟机的清洁系统及其控制方法以及烟机,清洁系统包括:清洁液喷射组件,用于将清洁液喷射至烟机的叶轮;盛接组件,盛接组件具有盛接槽,盛接槽用于沿叶轮流下的清洁液;循环喷射组件,循环喷射组件与盛接组件相连且在循环状态和蒸汽状态之间可切换,循环喷射组件处于循环状态时将盛接槽内的溶液以液态形式喷射向叶轮,循环喷射组件处于蒸汽状态时将将盛接槽内的溶液以蒸汽形式喷射向叶轮;控制器。根据本发明实施例的用于烟机的清洁系统,采用蒸汽清洗结合循环喷淋,利用清洁液对叶轮进行喷淋,将油污软化溶解,再用蒸汽对叶轮进
用于烟机的清洁系统及其控制方法以及烟机.pdf
本发明公开了一种用于烟机的清洁系统及其控制方法以及烟机,清洁系统包括:清洁液喷射组件,用于将清洁液喷射至烟机的叶轮;盛接组件,盛接组件具有盛接槽,盛接槽用于沿叶轮流下的清洁液;循环喷射组件,循环喷射组件与盛接组件相连且在循环状态和蒸汽状态之间可切换,循环喷射组件处于循环状态时将盛接槽内的溶液以液态形式喷射向叶轮,循环喷射组件处于蒸汽状态时将将盛接槽内的溶液以蒸汽形式喷射向叶轮;控制器。根据本发明实施例的用于烟机的清洁系统,采用蒸汽清洗结合循环喷淋,利用清洁液对叶轮进行喷淋,将油污软化溶解,再用蒸汽对叶轮进
氢能源清洁燃料的燃烧控制方法及其系统.pdf
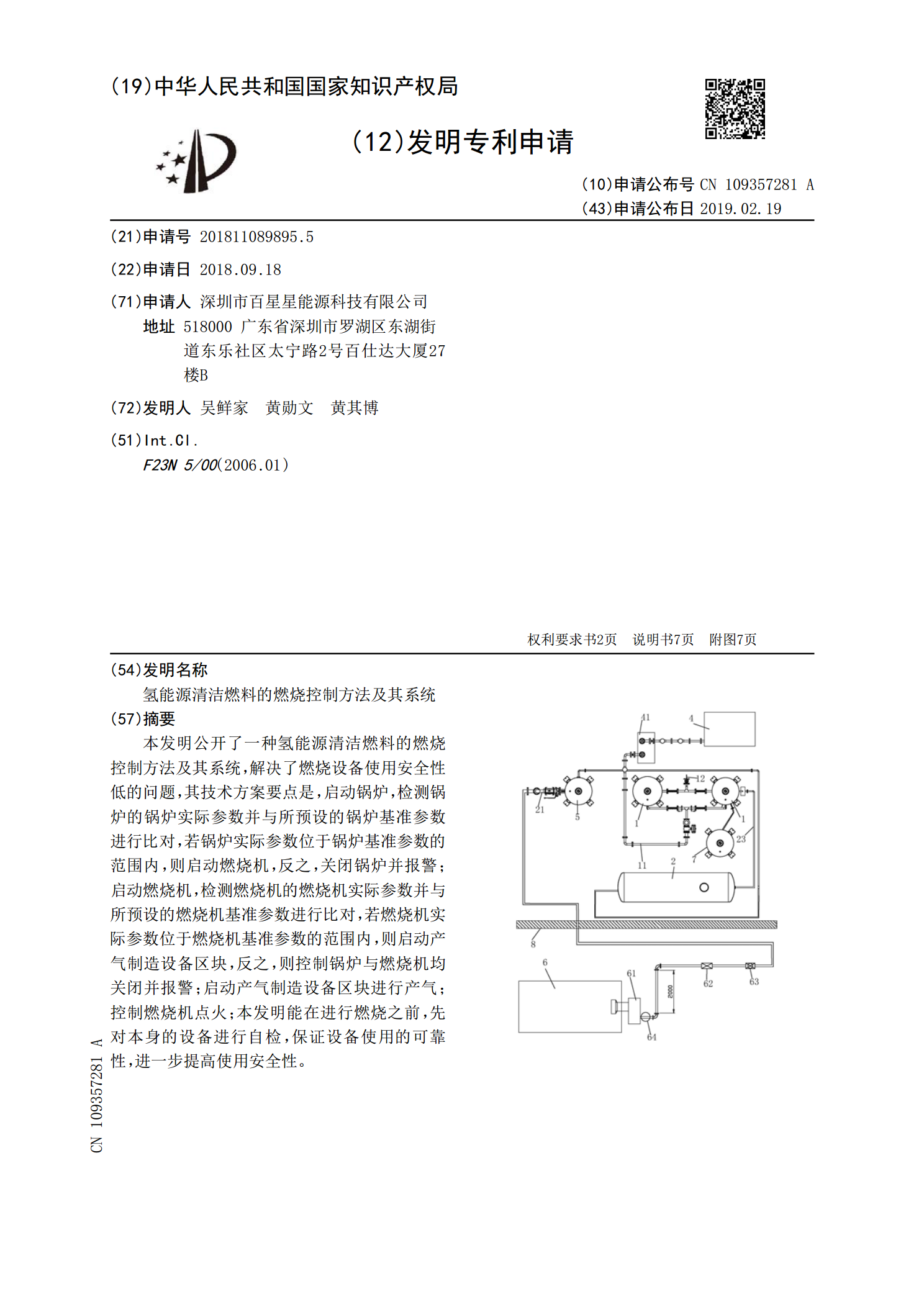
本发明公开了一种氢能源清洁燃料的燃烧控制方法及其系统,解决了燃烧设备使用安全性低的问题,其技术方案要点是,启动锅炉,检测锅炉的锅炉实际参数并与所预设的锅炉基准参数进行比对,若锅炉实际参数位于锅炉基准参数的范围内,则启动燃烧机,反之,关闭锅炉并报警;启动燃烧机,检测燃烧机的燃烧机实际参数并与所预设的燃烧机基准参数进行比对,若燃烧机实际参数位于燃烧机基准参数的范围内,则启动产气制造设备区块,反之,则控制锅炉与燃烧机均关闭并报警;启动产气制造设备区块进行产气;控制燃烧机点火;本发明能在进行燃烧之前,先对本身的设