
用于分割板状工件的板材分割设备及其运行方法.pdf

宜然****找我

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于分割板状工件的板材分割设备及其运行方法.pdf
本发明涉及一种用于分割板状工件(56)的板材分割设备(10),具有:输送台(12);带有分割线(14)的分割装置;取料台(16);至少一个第一运送装置(18),利用所述第一运送装置能够将所述输送台(12)上的工件(56)朝分割线(14)的方向移动。本发明提出:所述板材分割设备具有至少一个第二运送装置,所述第二运送装置包括机器人(24),所述机器人具有工作区域(46),所述工作区域不仅至少部分覆盖输送台(12)侧面的区域和/或至少部分覆盖输送台(12)的区域,而且至少部分覆盖取料台(16)的区域。

用于分割板状工件的板材分割设备及其运行方法.pdf
一种用于分割板状工件(48,49)的板材分割设备(10),具有:输送台(12);用于在输送台(12)上沿第一运送方向(19)运输初始工件的运送装置(18);用于将所述初始工件分割成经分割工件的分割装置(13);以及缓冲装置(31),用于在进一步分割操作之前缓冲经分割工件,在考虑到利用构造上简单的机构实现全自动使用的情况下,所述缓冲装置(31)构成并改进为使得:在所述缓冲装置中能够使被缓冲的工件在第二运送方向(38)上至少朝向所述输送台移动,其中所述第二运送方向(38)相对于所述第一运送方向(19)横向定向
用于分割板状工件的板分割设备以及方法.pdf
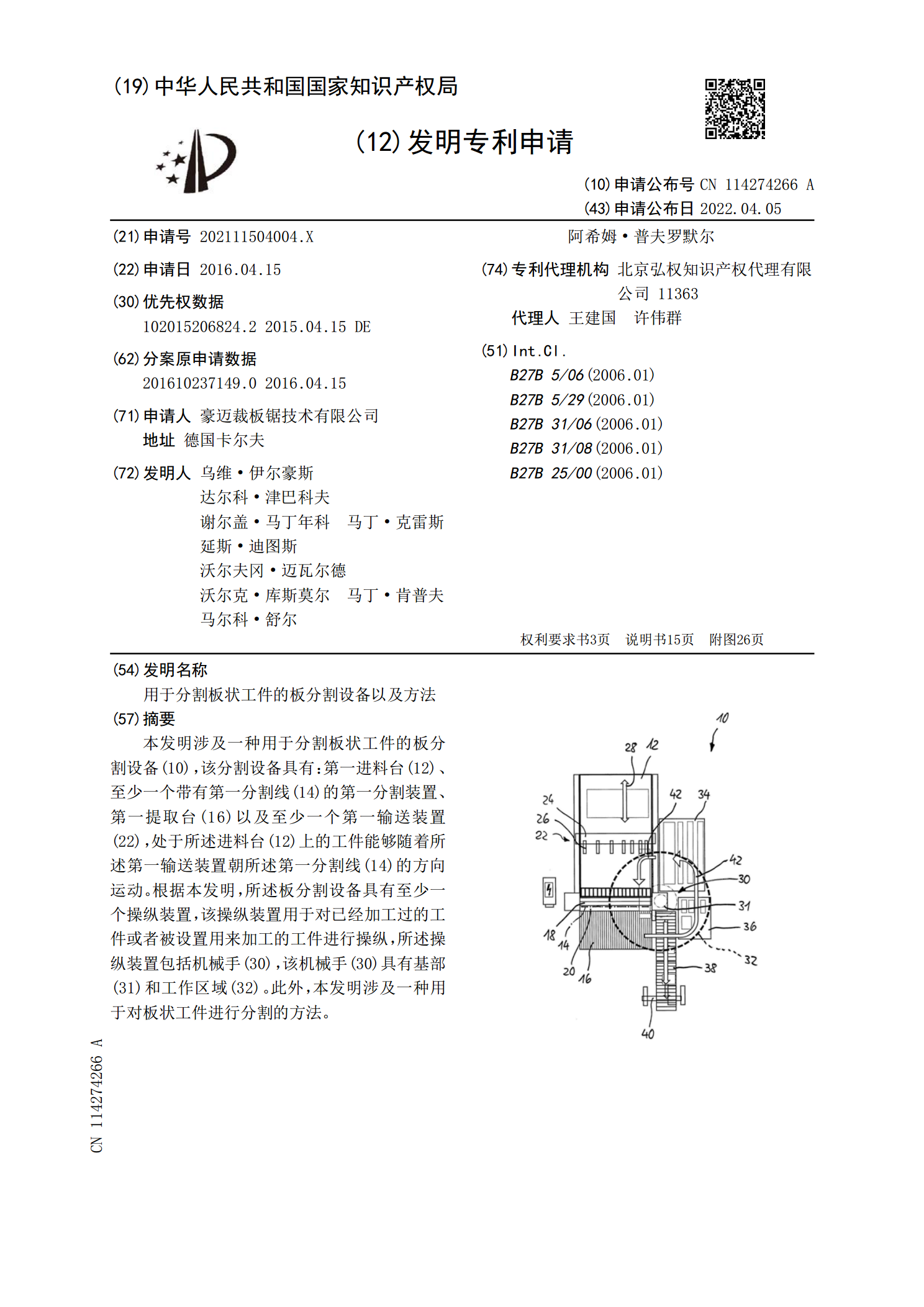
本发明涉及一种用于分割板状工件的板分割设备(10),该分割设备具有:第一进料台(12)、至少一个带有第一分割线(14)的第一分割装置、第一提取台(16)以及至少一个第一输送装置(22),处于所述进料台(12)上的工件能够随着所述第一输送装置朝所述第一分割线(14)的方向运动。根据本发明,所述板分割设备具有至少一个操纵装置,该操纵装置用于对已经加工过的工件或者被设置用来加工的工件进行操纵,所述操纵装置包括机械手(30),该机械手(30)具有基部(31)和工作区域(32)。此外,本发明涉及一种用于对板状工件进
用于加工板状的工件的方法,以及用于进行该方法的板分割设备.pdf
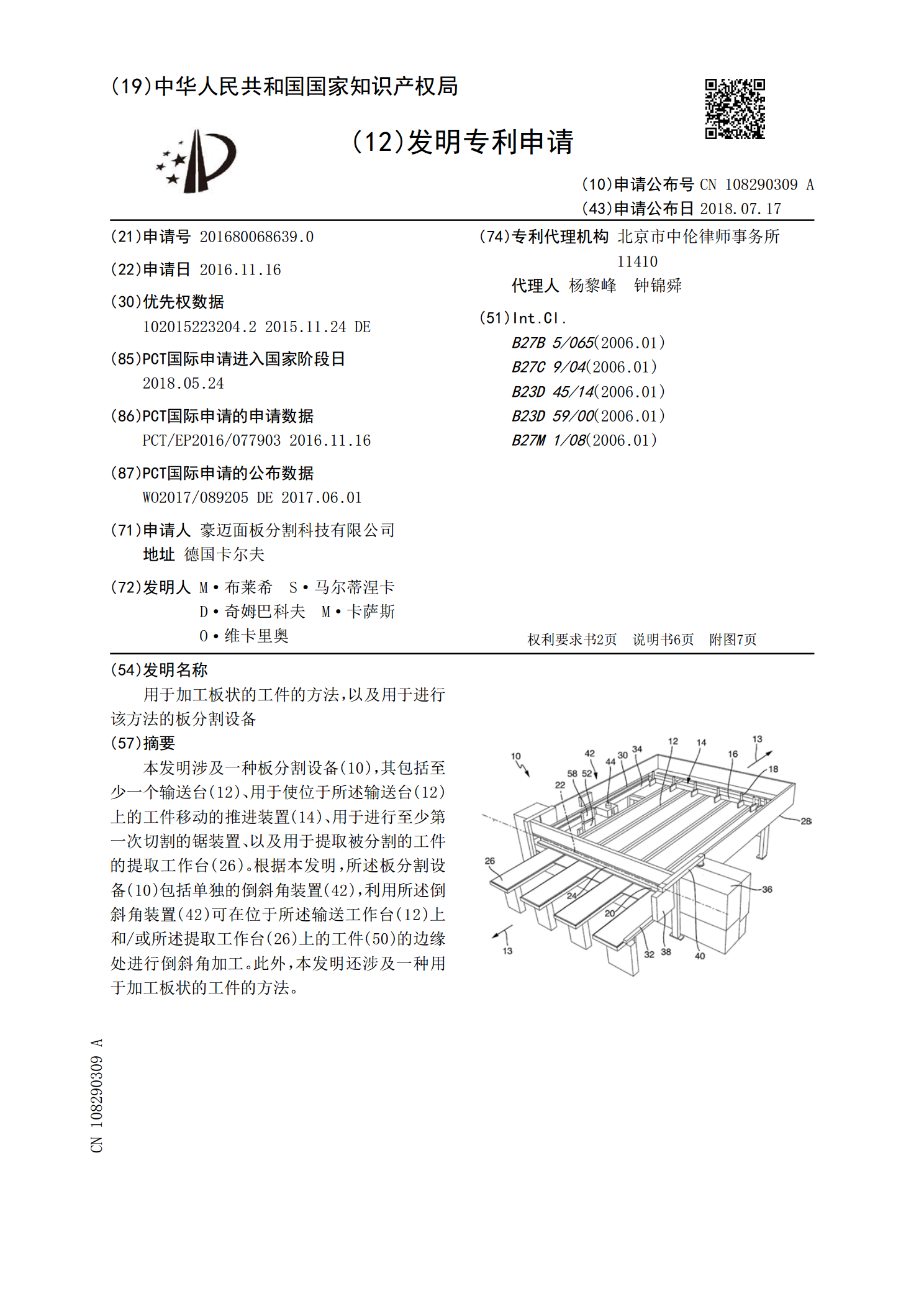
本发明涉及一种板分割设备(10),其包括至少一个输送台(12)、用于使位于所述输送台(12)上的工件移动的推进装置(14)、用于进行至少第一次切割的锯装置、以及用于提取被分割的工件的提取工作台(26)。根据本发明,所述板分割设备(10)包括单独的倒斜角装置(42),利用所述倒斜角装置(42)可在位于所述输送工作台(12)上和/或所述提取工作台(26)上的工件(50)的边缘处进行倒斜角加工。此外,本发明还涉及一种用于加工板状的工件的方法。

用于分割优选为板状的工件的方法.pdf
本发明涉及一种用于通过工件分割设备的分割工具来分割板状工件的方法,该分割工具在相应的切割过程中沿着分割线作用。