
具有CCD检测的自动化激光焊接装置及焊接方法.pdf

一吃****仪凡

1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
具有CCD检测的自动化激光焊接装置及焊接方法.pdf
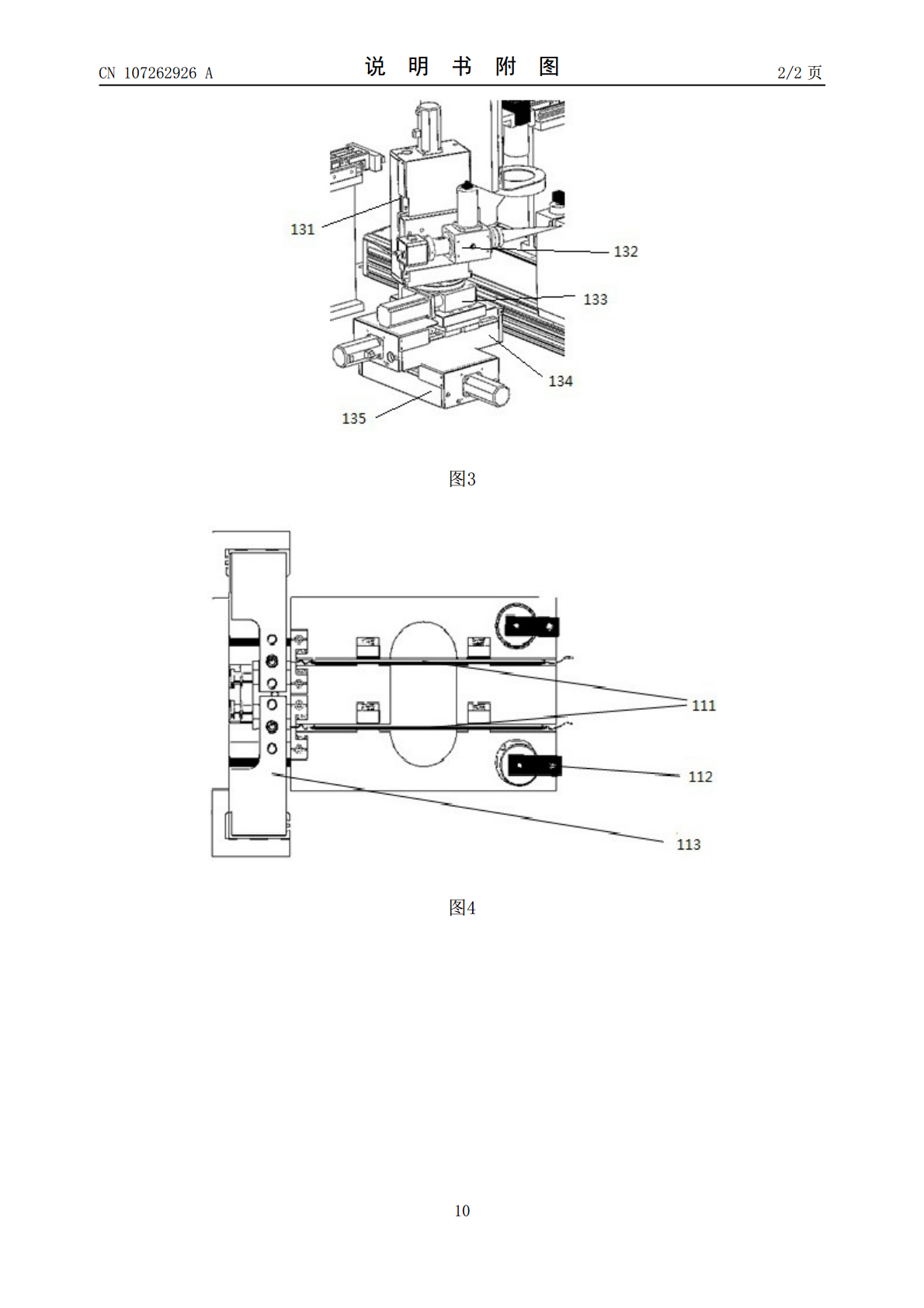
本发明公开了一种具有CCD视觉定位的自动激光焊接装置及焊接方法。该装置包括激光平台和机架机罩,还包括:设有导轨定位基准、夹具、送料轴、旋转压紧气缸水平设置在激光平台上的送料装置;设置激光平台一端的设有第一激光头的二维激光器;设置在激光平台另一端设有第二激光头、CCD视觉定位相机的四维激光器;设置在机架机罩内的PC控制机。本发明的有益效果:设备通过CCD视觉定位相机获取目标的图像信号,由PC控制机计算出相应的目标位置并驱动设备进行位置定位,机器视觉+图像处理的使用提高了焊接精度,排除工装和产品误差,并且避免

激光焊接装置及焊接方法.pdf
一种激光焊接装置,由于焊接头的聚集镜片为长焦镜片,故在焊接时,焊接头可置于离焊接熔池较远的位置,从而可减小熔池热辐射对于焊接头中光学器件的影响,避免聚集镜片产生焦点漂移。此外,侧吹保护结构的第一吹气口在焊接时向焊接熔池喷射保护气体,可将熔池上方的等离子体吹散,从而可减少等离子体火焰的高度,减小了等离子体对激光束的屏蔽作用,进而避免产生驼峰。综上所述,上述激光焊接装置可有效提高厚板焊接过程中的焊接稳定性。此外,本发明还提供一种焊接方法。
激光焊接夹具装置、设备及激光焊接夹持方法.pdf
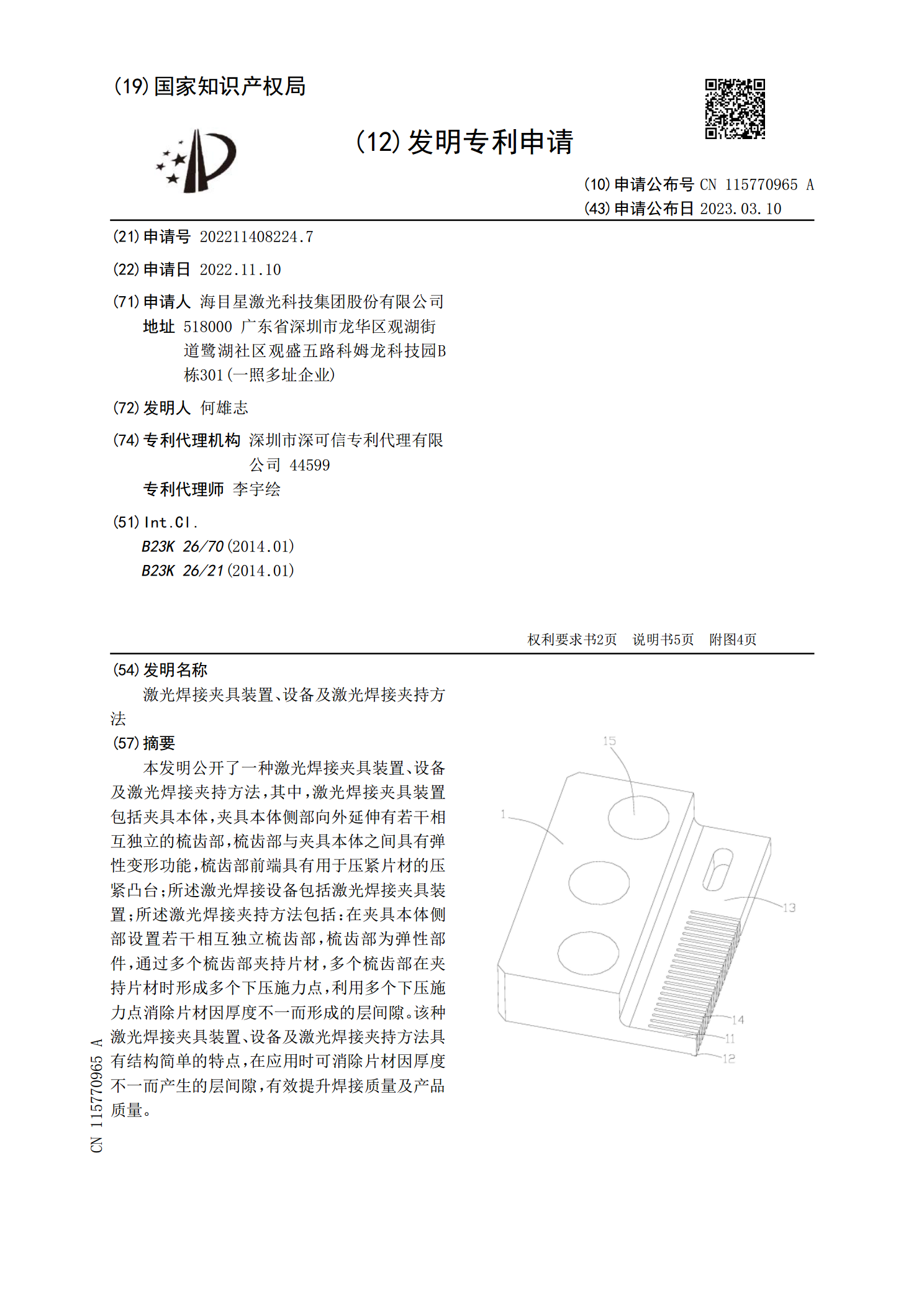
本发明公开了一种激光焊接夹具装置、设备及激光焊接夹持方法,其中,激光焊接夹具装置包括夹具本体,夹具本体侧部向外延伸有若干相互独立的梳齿部,梳齿部与夹具本体之间具有弹性变形功能,梳齿部前端具有用于压紧片材的压紧凸台;所述激光焊接设备包括激光焊接夹具装置;所述激光焊接夹持方法包括:在夹具本体侧部设置若干相互独立梳齿部,梳齿部为弹性部件,通过多个梳齿部夹持片材,多个梳齿部在夹持片材时形成多个下压施力点,利用多个下压施力点消除片材因厚度不一而形成的层间隙。该种激光焊接夹具装置、设备及激光焊接夹持方法具有结构简单的
具有烟尘净化功能的激光焊接装置.pdf
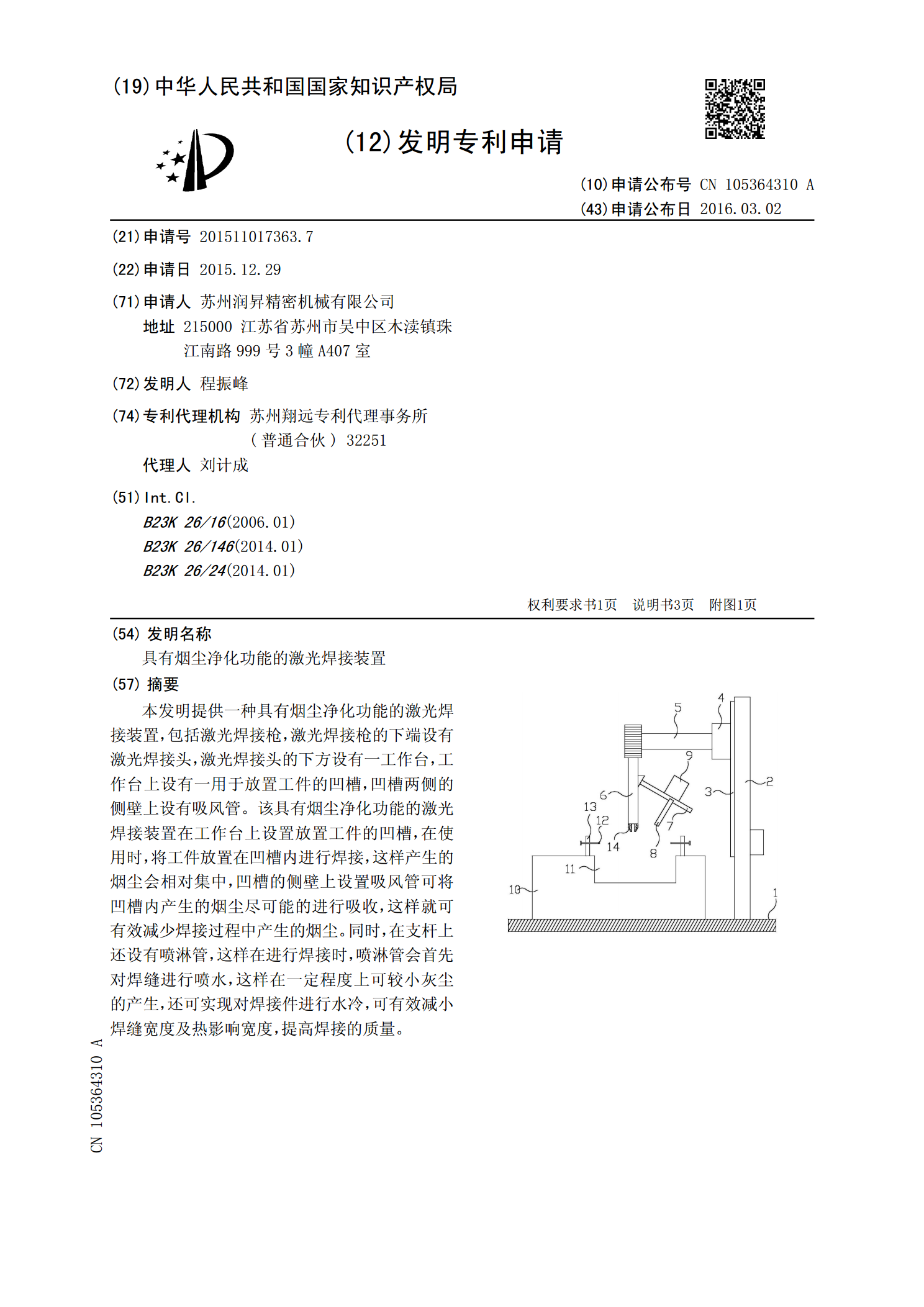
本发明提供一种具有烟尘净化功能的激光焊接装置,包括激光焊接枪,激光焊接枪的下端设有激光焊接头,激光焊接头的下方设有一工作台,工作台上设有一用于放置工件的凹槽,凹槽两侧的侧壁上设有吸风管。该具有烟尘净化功能的激光焊接装置在工作台上设置放置工件的凹槽,在使用时,将工件放置在凹槽内进行焊接,这样产生的烟尘会相对集中,凹槽的侧壁上设置吸风管可将凹槽内产生的烟尘尽可能的进行吸收,这样就可有效减少焊接过程中产生的烟尘。同时,在支杆上还设有喷淋管,这样在进行焊接时,喷淋管会首先对焊缝进行喷水,这样在一定程度上可较小灰尘

一种自动化激光焊接装置及方法.pdf
一种自动化激光焊接装置,包括蝶形工艺螺杆一、夹紧机构、蝶形工艺螺杆二、激光焊头、背面气体保护型腔、蝶形工艺螺杆三、可压缩密封垫、焊接台面、卡槽、工艺销子、延迟保护气体喷头、侧吹保护气体喷头、进气管、激光焊接机头,卡槽位于焊接台面两侧并与焊接台面固定为一个整体,夹紧机构与卡槽均留有与工艺销子装配定位的孔并通过工艺销子便可将夹紧机构与卡槽连接于焊接台面侧面上,蝶形工艺螺杆一与蝶形工艺螺杆二安装在夹紧机构上并通过与夹紧机构上的螺纹孔拧紧实现紧固待焊零件一和待焊零件二。该自动化激光焊接装置能够有效避免零件在批量化