
挂弹车举升机构举升力自适应控制系统及控制方法.pdf

韶敏****ab

1/9

2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
挂弹车举升机构举升力自适应控制系统及控制方法.pdf
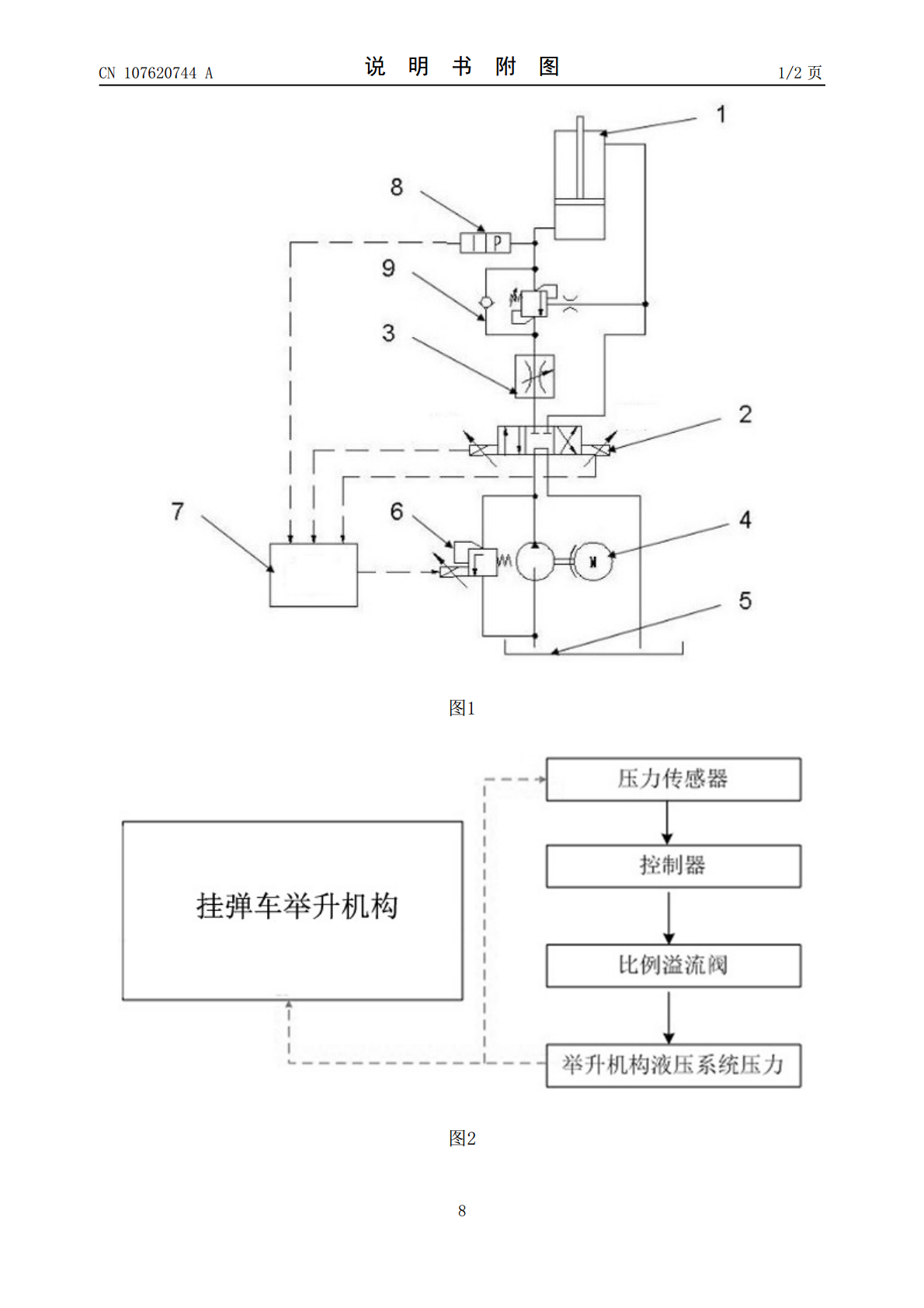
本发明提供一种挂弹车举升机构举升力自适应控制系统及控制方法,通过在液压传动系统中设置压力传感器,通过采集液压油缸的压力来间接测量所挂导弹的重量;本发明在液压传动系统中设置比例溢流阀,通过调整比例溢流阀中比例电磁铁得电的大小来实现对液压系统最大工作压力的控制;本发明中设有控制器,控制器采集压力传感器动态信号以及电磁换向阀的得电情况,按照一定的控制率,动态调整比例溢流阀比例电磁铁得电大小,来实现液压系统最大工作压力的自适应设定,本发明可自动检测识别不同导弹的重量,并根据挂弹需求动态调整挂弹车举升机构举升力,以

一种挂弹车的举升平移系统.pdf
本发明涉及挂弹车技术领域,具体公开一种挂弹车的举升平移系统,包括平移系统和举升系统;所述平移系统包括平移车体和电动推杆,所述电动推杆下方设有与齿条啮合的移动齿轮,所述举升系统包括两套平行四边形连杆机构和两对举升臂;所述两套平行四边形连杆机构相互连接,均包括两个转轴和两个连接杆,且位于下侧的转轴和电动推杆连接,两对举升臂连接在上侧的两个转轴的两端上;所述平移车体包括底架、位于底架上方的侧支架及前撑杆。本发明的优点是,平移系统结构简单,运行平稳,举升系统采用平行四边形连杆机构,可实现大行程举升。
车辆举升机高度控制方法、控制系统及举升机.pdf
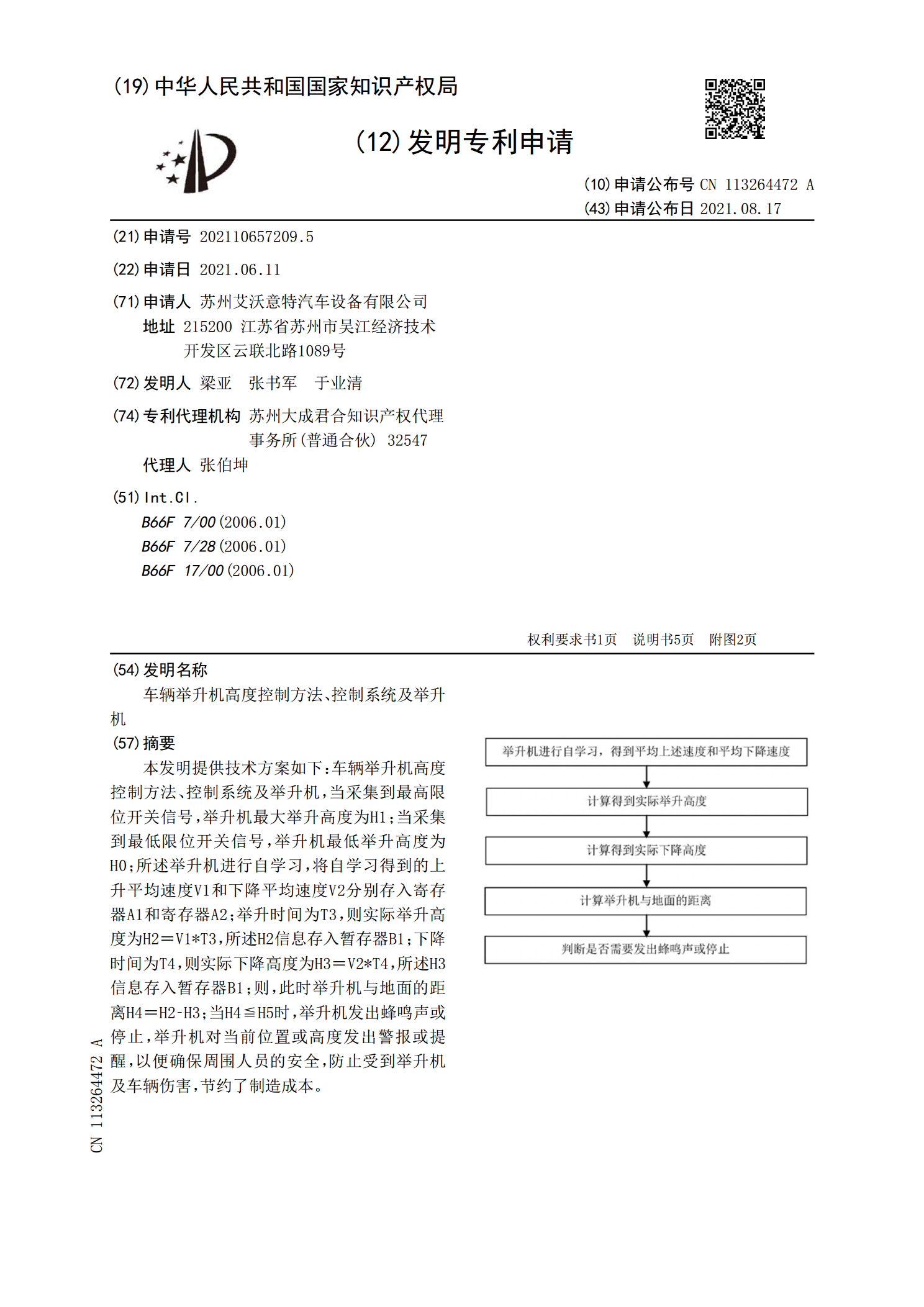
本发明提供技术方案如下:车辆举升机高度控制方法、控制系统及举升机,当采集到最高限位开关信号,举升机最大举升高度为H1;当采集到最低限位开关信号,举升机最低举升高度为H0;所述举升机进行自学习,将自学习得到的上升平均速度V1和下降平均速度V2分别存入寄存器A1和寄存器A2;举升时间为T3,则实际举升高度为H2=V1*T3,所述H2信息存入暂存器B1;下降时间为T4,则实际下降高度为H3=V2*T4,所述H3信息存入暂存器B1;则,此时举升机与地面的距离H4=H2‑H3;当H4≦H5时,举升机发出蜂鸣声或停止

手动挂弹车.pdf
一种手动挂弹车,包括车体和牵引拉手;车体的中间部分呈矩形凹槽形状,并在凹槽内设置内箱体和剪叉机构;剪叉机构前部下端与车体铰连接,剪叉机构后部下端装配手动减速机丝杠驱动机构,剪叉机构前部上端与内箱体铰连接,剪叉机构后部上端与内箱体滑动配合;在内箱体上设有弹体托架,弹体托架后端与内箱体后端铰连接,弹体托架上设有弹体固定装置;内箱体前部装配有通过棘轮扳手驱动的弹体托架倾角调整装置;车体装配有减震万向脚轮和丝杠支腿。本发明能够载弹进行多方位运动,精确调整弹体高度和倾角,特别适用于轻型固定翼飞机的腹部装卸航空炸弹,

简易挂弹车.pdf
一种简易挂弹车,具有前端设置牵引拉手的行走小车,在行走小车上由中部向后依次设有剪式千斤顶、竖置的丝杠螺母副和抬升杆,丝杠螺母副的丝杠装配蜗轮蜗杆驱动机构,丝杠螺母副的螺母连接链轮,抬升杆通过设置在其中部的横轴铰连接在行走小车上,一链条从所述链轮的下方通过并与其啮合,该链条的前端铰连接在剪式千斤顶的上端,该链条的后端与抬升杆的前端铰连接,剪式千斤顶的上端与弹体托架的中部铰连接,在抬升杆的后端设有一对辊轮,该辊轮与设置在弹体托架后部的辊轮轨道配合,弹体托架上设有弹体固定装置。本发明结构简单、体积小、操作灵活方