
一种基于机器视觉的定位装置.pdf

是丹****ni

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于机器视觉的定位装置.pdf
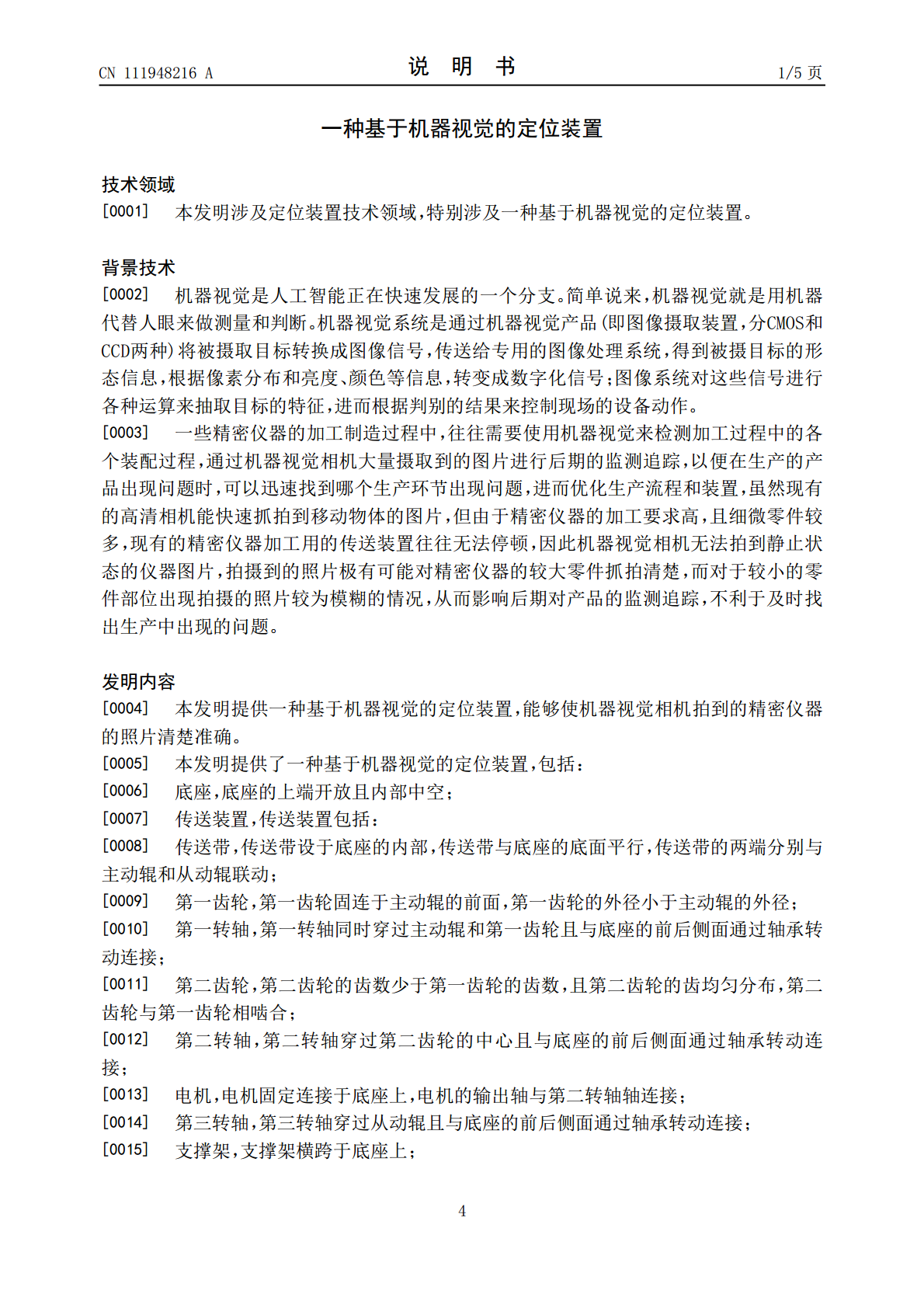
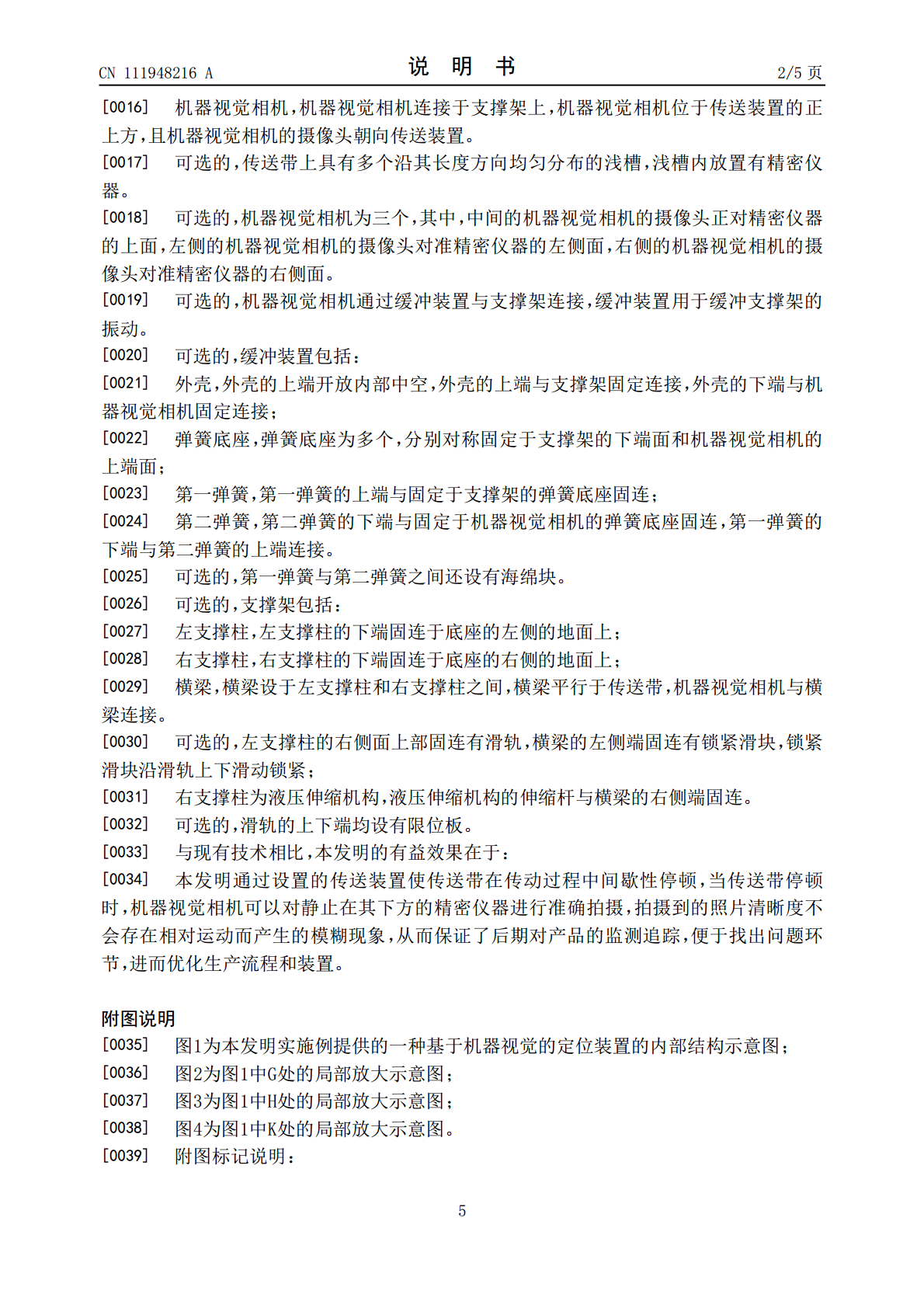
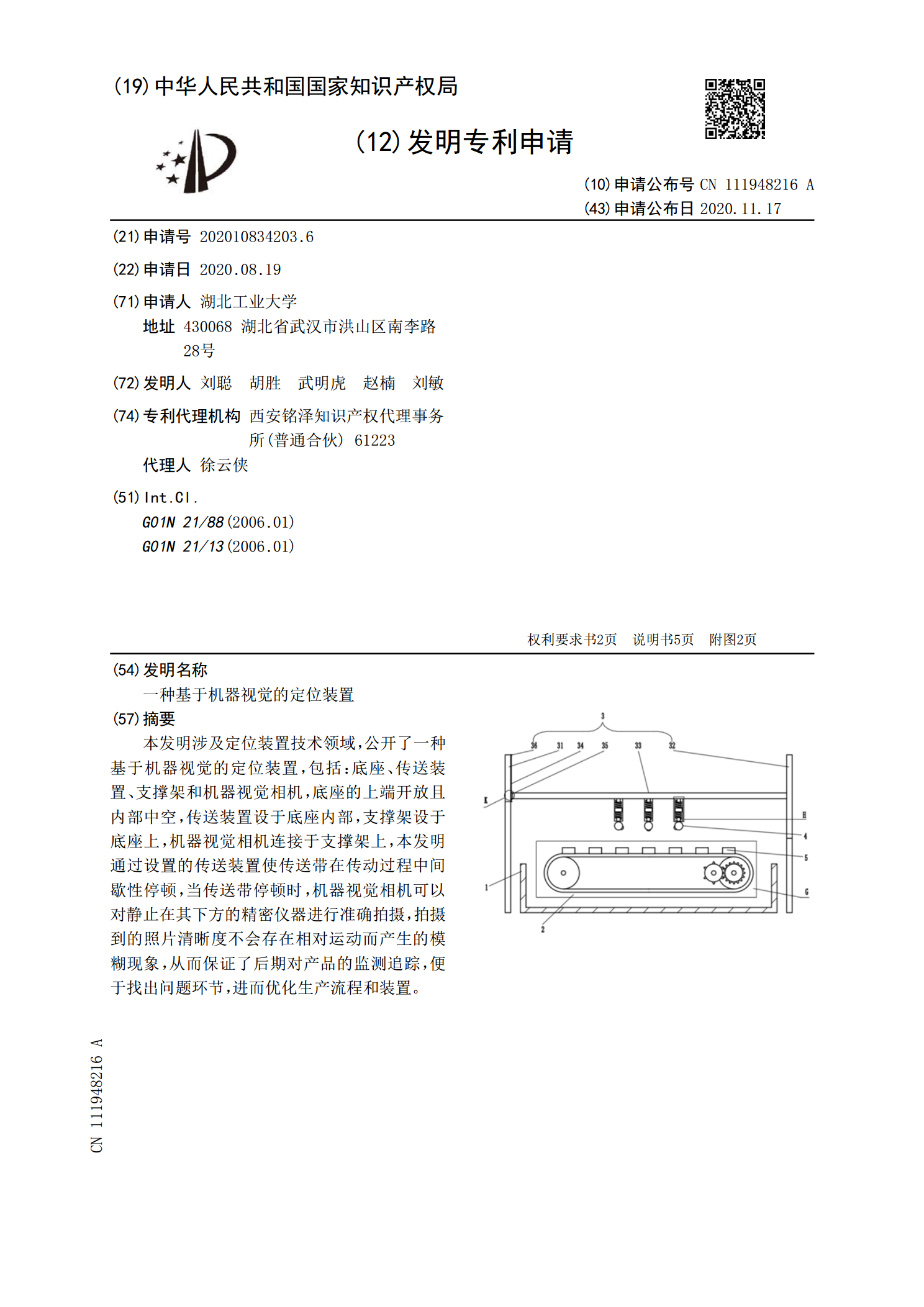
本发明涉及定位装置技术领域,公开了一种基于机器视觉的定位装置,包括:底座、传送装置、支撑架和机器视觉相机,底座的上端开放且内部中空,传送装置设于底座内部,支撑架设于底座上,机器视觉相机连接于支撑架上,本发明通过设置的传送装置使传送带在传动过程中间歇性停顿,当传送带停顿时,机器视觉相机可以对静止在其下方的精密仪器进行准确拍摄,拍摄到的照片清晰度不会存在相对运动而产生的模糊现象,从而保证了后期对产品的监测追踪,便于找出问题环节,进而优化生产流程和装置。
一种基于机器视觉的定位装置.pdf
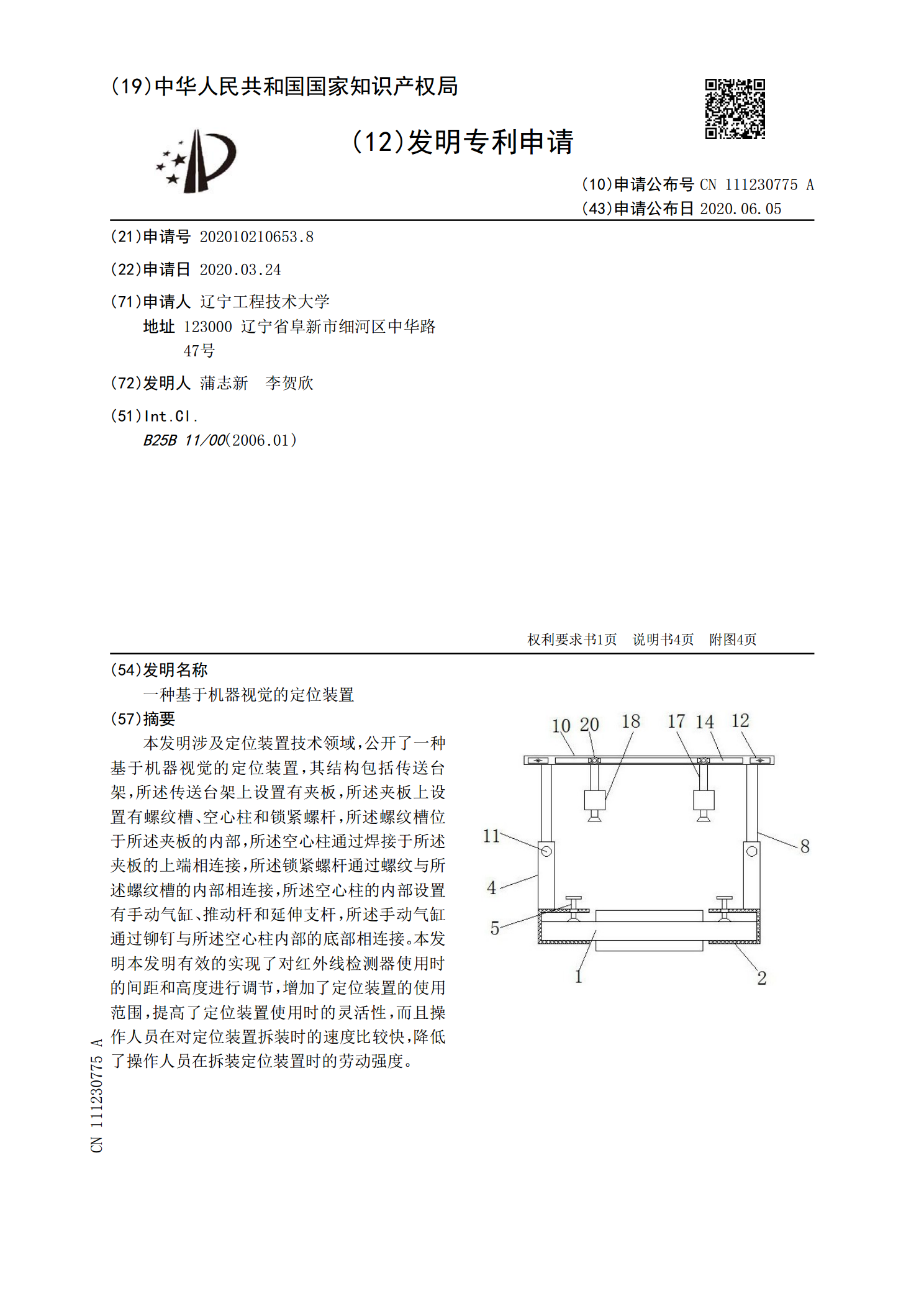
本发明涉及定位装置技术领域,公开了一种基于机器视觉的定位装置,其结构包括传送台架,所述传送台架上设置有夹板,所述夹板上设置有螺纹槽、空心柱和锁紧螺杆,所述螺纹槽位于所述夹板的内部,所述空心柱通过焊接于所述夹板的上端相连接,所述锁紧螺杆通过螺纹与所述螺纹槽的内部相连接,所述空心柱的内部设置有手动气缸、推动杆和延伸支杆,所述手动气缸通过铆钉与所述空心柱内部的底部相连接。本发明本发明有效的实现了对红外线检测器使用时的间距和高度进行调节,增加了定位装置的使用范围,提高了定位装置使用时的灵活性,而且操作人员在对定位

一种基于机器视觉的定位装置.pdf
本发明公开了一种基于机器视觉的定位装置,其技术方案要点是:包括底板,所述底板的顶部开设有凹槽,所述凹槽的内部设有传输带,所述底板上设有用于转动传输带的驱动结构,所述底板的顶部固定连接有架体,若物料之间的间距过大时,工作人员可通过转动结构转动滚轮,使得滚轮接触物料,滚轮在转动时能够使得物料在传输带上平移,可以夹块物料的传输速度,以此达到了减少两个物料之间的间距,若物料之间的间距过小时,工作人员可通过转动结构反向转动滚轮,滚轮与物料接触后,能够让物料向传输带传输方向的反方向移动,以此可以达到增大物料之间的距离

一种基于机器视觉的工件定位方法及装置.pdf
本发明涉及智能机器人技术领域,具体涉及一种基于机器视觉的工件定位方法及装置,首先确定目标工件,采集Kinect相机拍摄的图像,检测所述图像中包含所述目标工件图像的预测框;进而根据所述预测框的回归坐标确定所述目标工件的轮廓,以及目标工件中心点的二维坐标;接着获取所述Kinect相机的标定参数,根据所述标定参数和所述目标工件中心点的二维坐标得出目标工件中心点的三维坐标;最后将所述目标工件的轮廓和所述目标工件中心点的三维坐标作为目标工件的定位结果,本发明可以对工件进行准确的识别与定位。
一种基于机器视觉的三轴定位装置.pdf
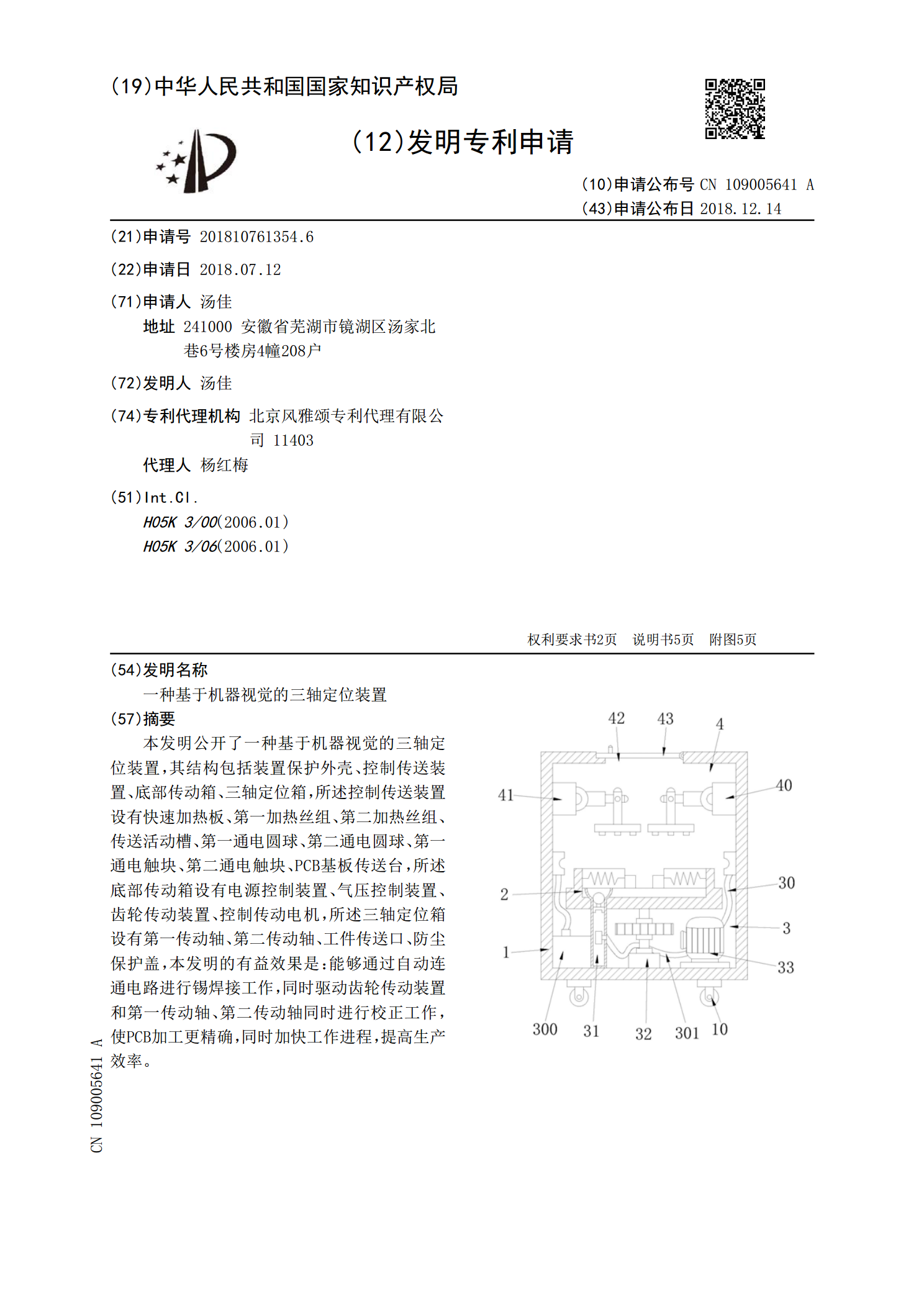
本发明公开了一种基于机器视觉的三轴定位装置,其结构包括装置保护外壳、控制传送装置、底部传动箱、三轴定位箱,所述控制传送装置设有快速加热板、第一加热丝组、第二加热丝组、传送活动槽、第一通电圆球、第二通电圆球、第一通电触块、第二通电触块、PCB基板传送台,所述底部传动箱设有电源控制装置、气压控制装置、齿轮传动装置、控制传动电机,所述三轴定位箱设有第一传动轴、第二传动轴、工件传送口、防尘保护盖,本发明的有益效果是:能够通过自动连通电路进行锡焊接工作,同时驱动齿轮传动装置和第一传动轴、第二传动轴同时进行校正工作,