
硬管内窥镜旋转角度测量方法和装置.pdf

闪闪****魔王


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
硬管内窥镜旋转角度测量方法和装置.pdf
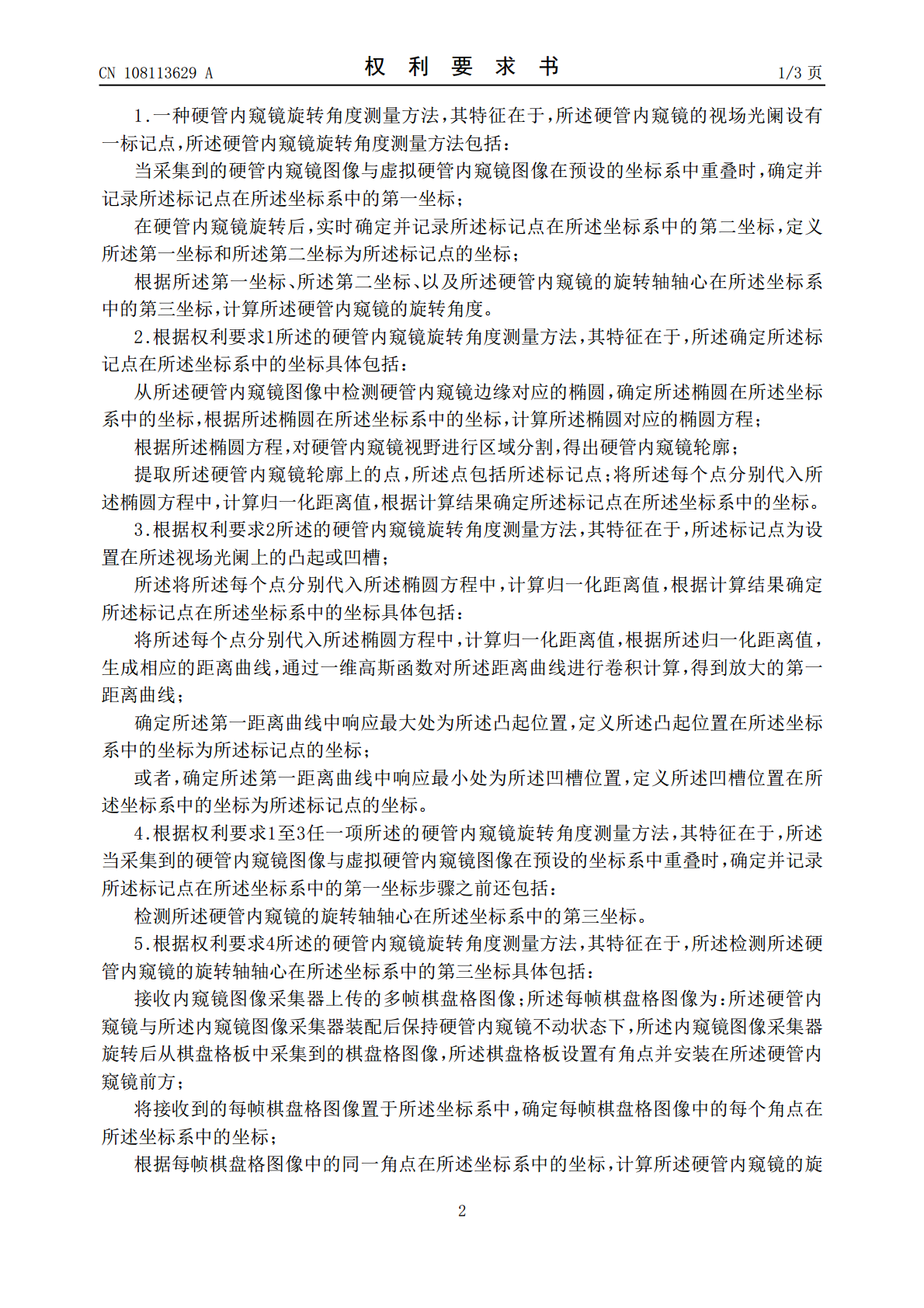
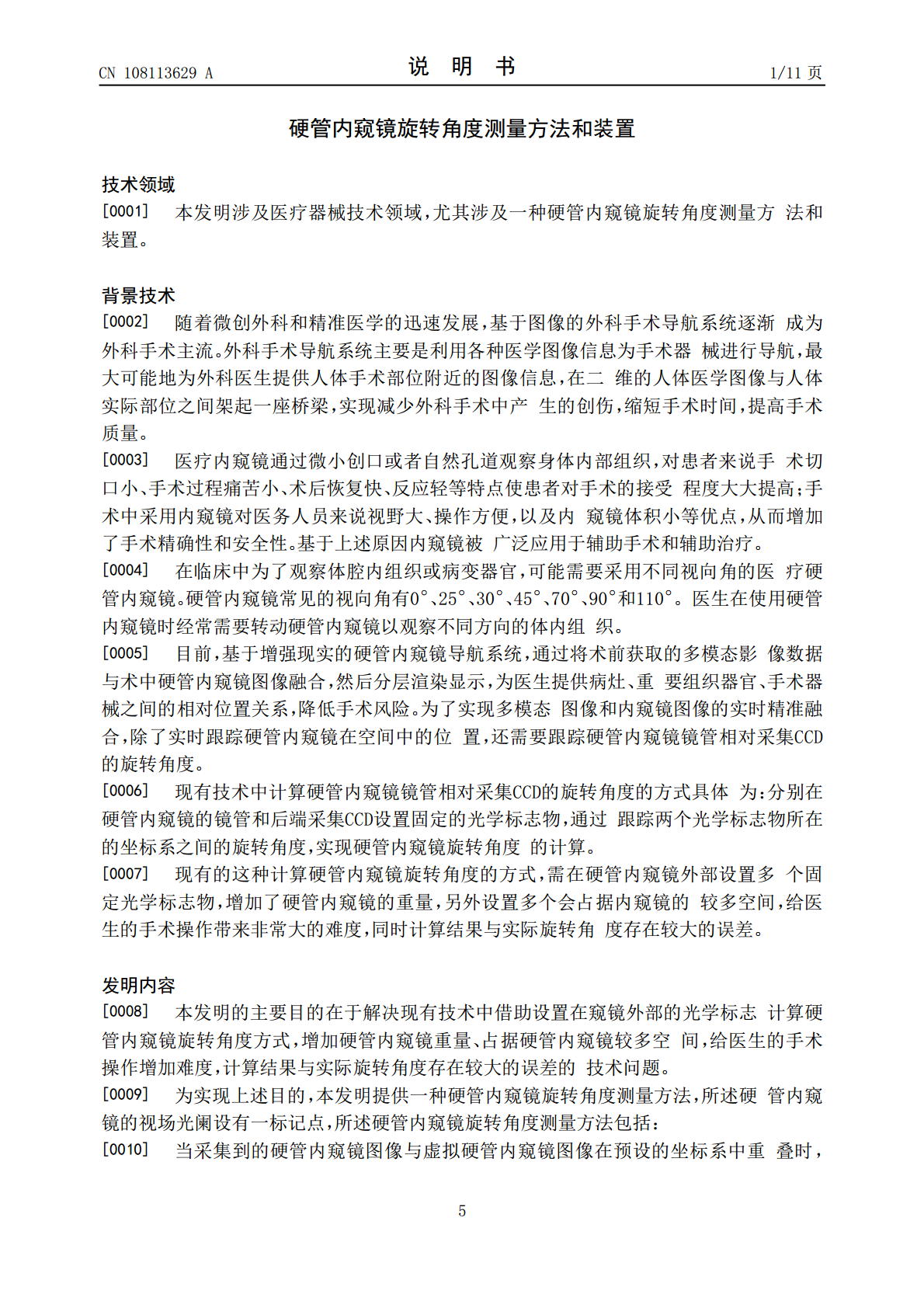
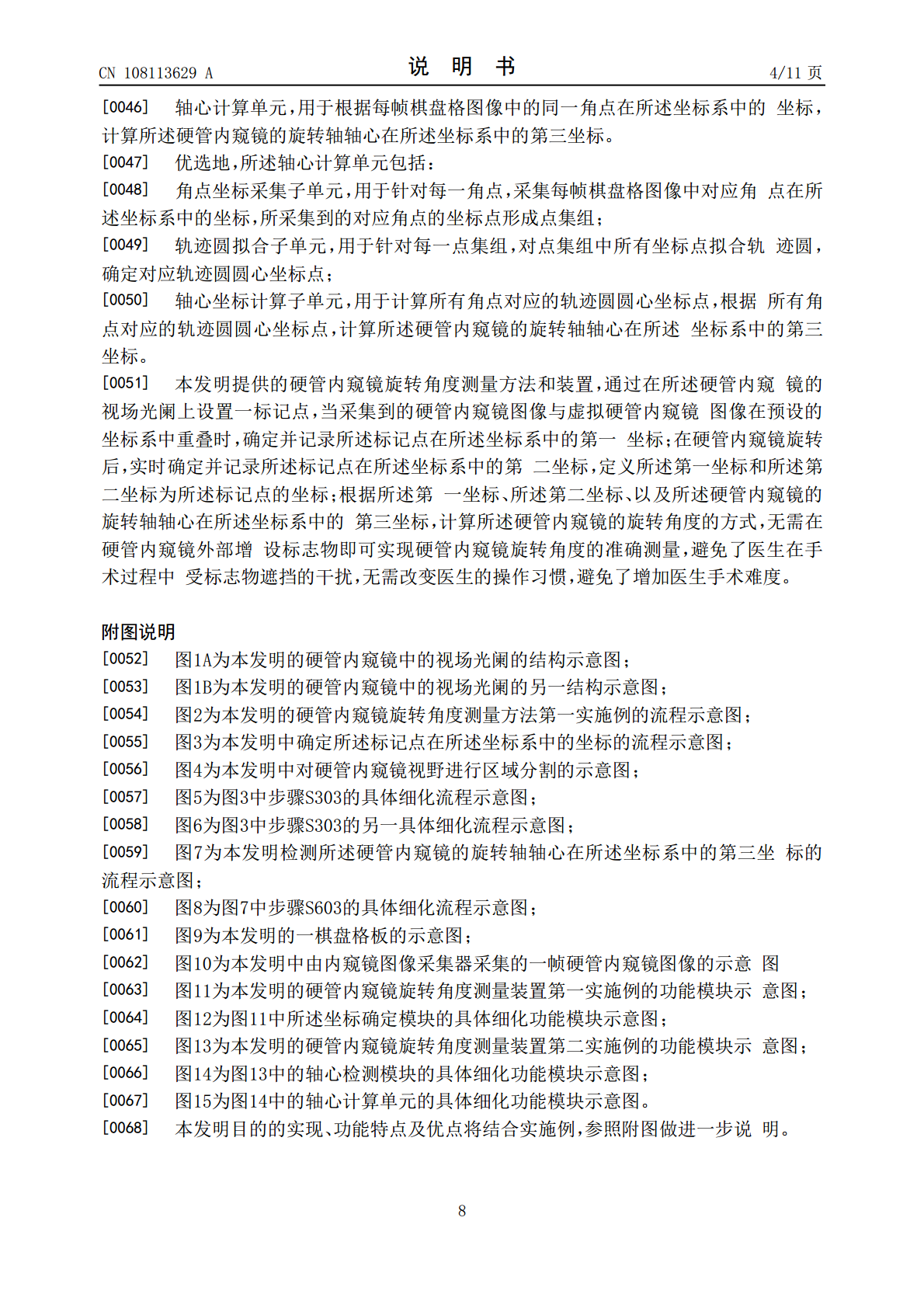
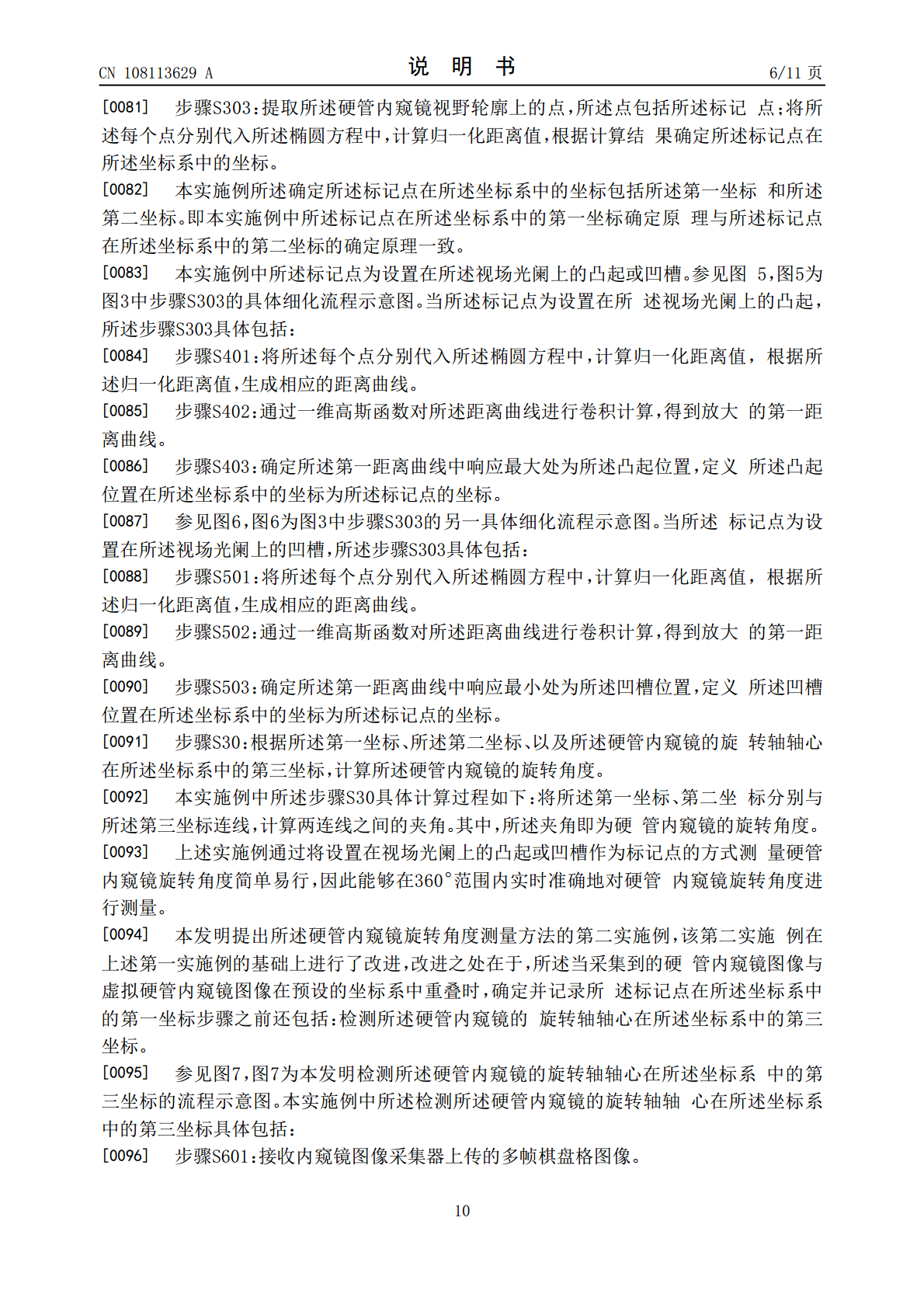
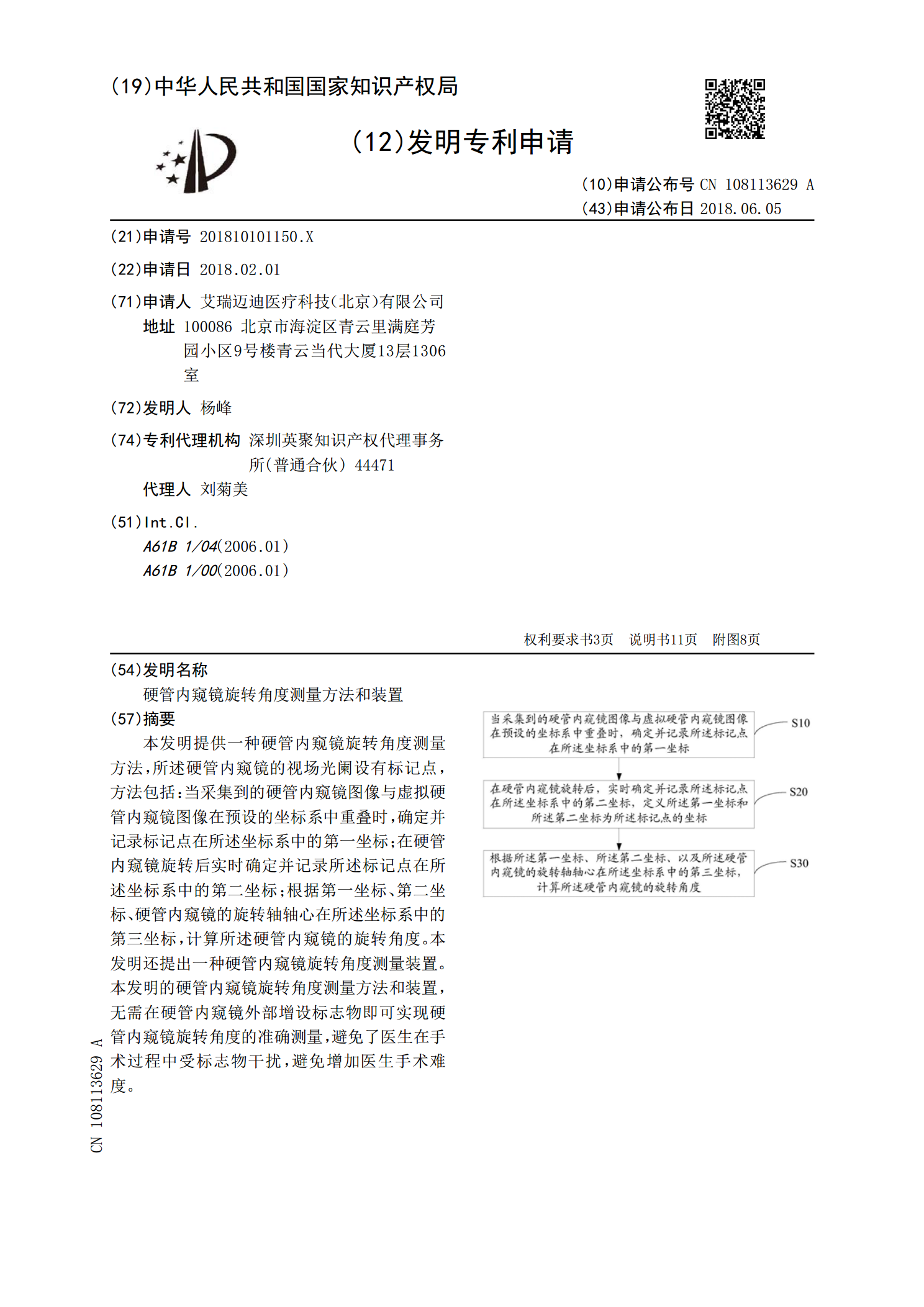
本发明提供一种硬管内窥镜旋转角度测量方法,所述硬管内窥镜的视场光阑设有标记点,方法包括:当采集到的硬管内窥镜图像与虚拟硬管内窥镜图像在预设的坐标系中重叠时,确定并记录标记点在所述坐标系中的第一坐标;在硬管内窥镜旋转后实时确定并记录所述标记点在所述坐标系中的第二坐标;根据第一坐标、第二坐标、硬管内窥镜的旋转轴轴心在所述坐标系中的第三坐标,计算所述硬管内窥镜的旋转角度。本发明还提出一种硬管内窥镜旋转角度测量装置。本发明的硬管内窥镜旋转角度测量方法和装置,无需在硬管内窥镜外部增设标志物即可实现硬管内窥镜旋转角度
硬管内窥镜旋转轴轴心测量方法和装置.pdf
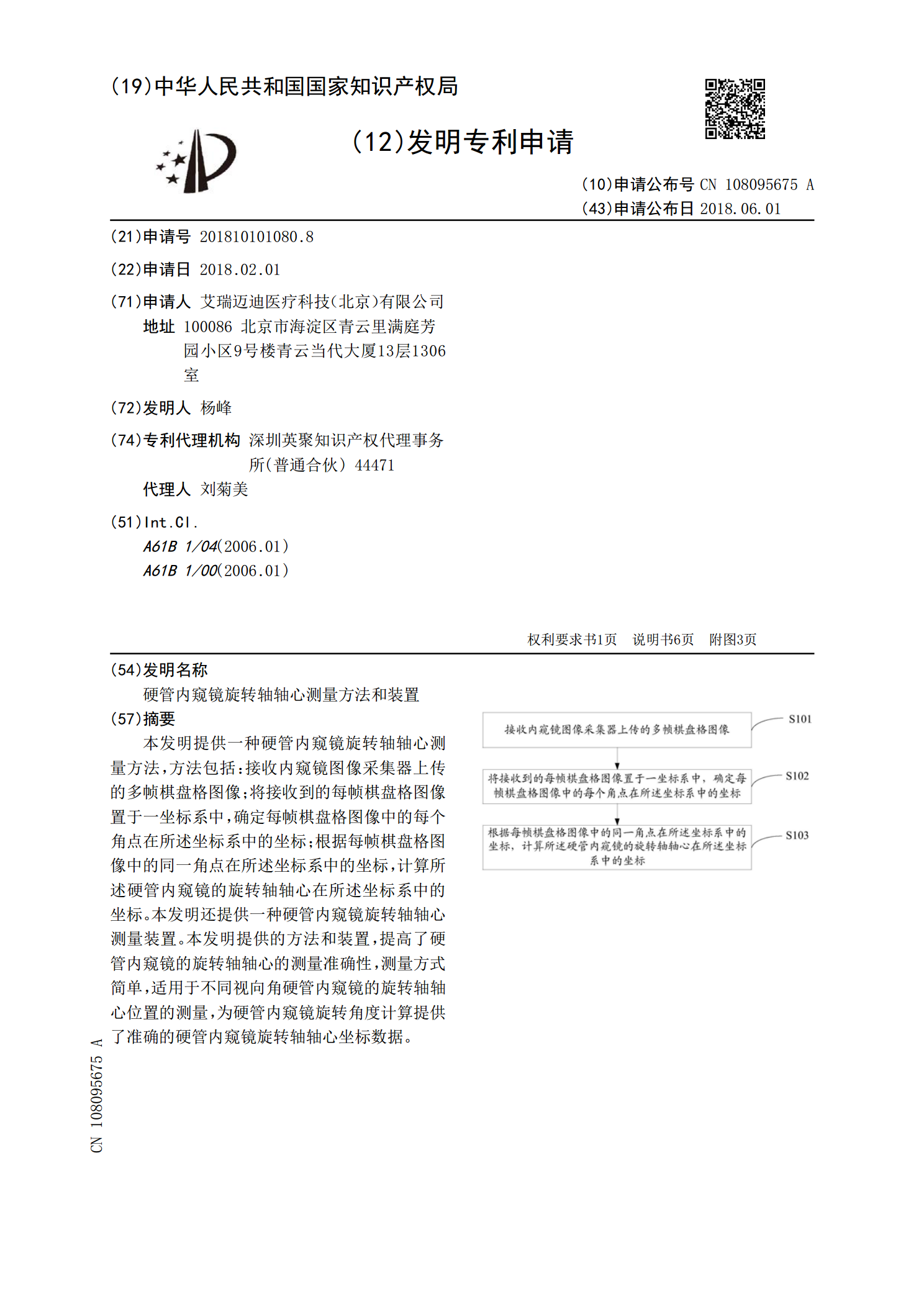
本发明提供一种硬管内窥镜旋转轴轴心测量方法,方法包括:接收内窥镜图像采集器上传的多帧棋盘格图像;将接收到的每帧棋盘格图像置于一坐标系中,确定每帧棋盘格图像中的每个角点在所述坐标系中的坐标;根据每帧棋盘格图像中的同一角点在所述坐标系中的坐标,计算所述硬管内窥镜的旋转轴轴心在所述坐标系中的坐标。本发明还提供一种硬管内窥镜旋转轴轴心测量装置。本发明提供的方法和装置,提高了硬管内窥镜的旋转轴轴心的测量准确性,测量方式简单,适用于不同视向角硬管内窥镜的旋转轴轴心位置的测量,为硬管内窥镜旋转角度计算提供了准确的硬管内
旋转角度测量方法和旋转角度测量电路.pdf
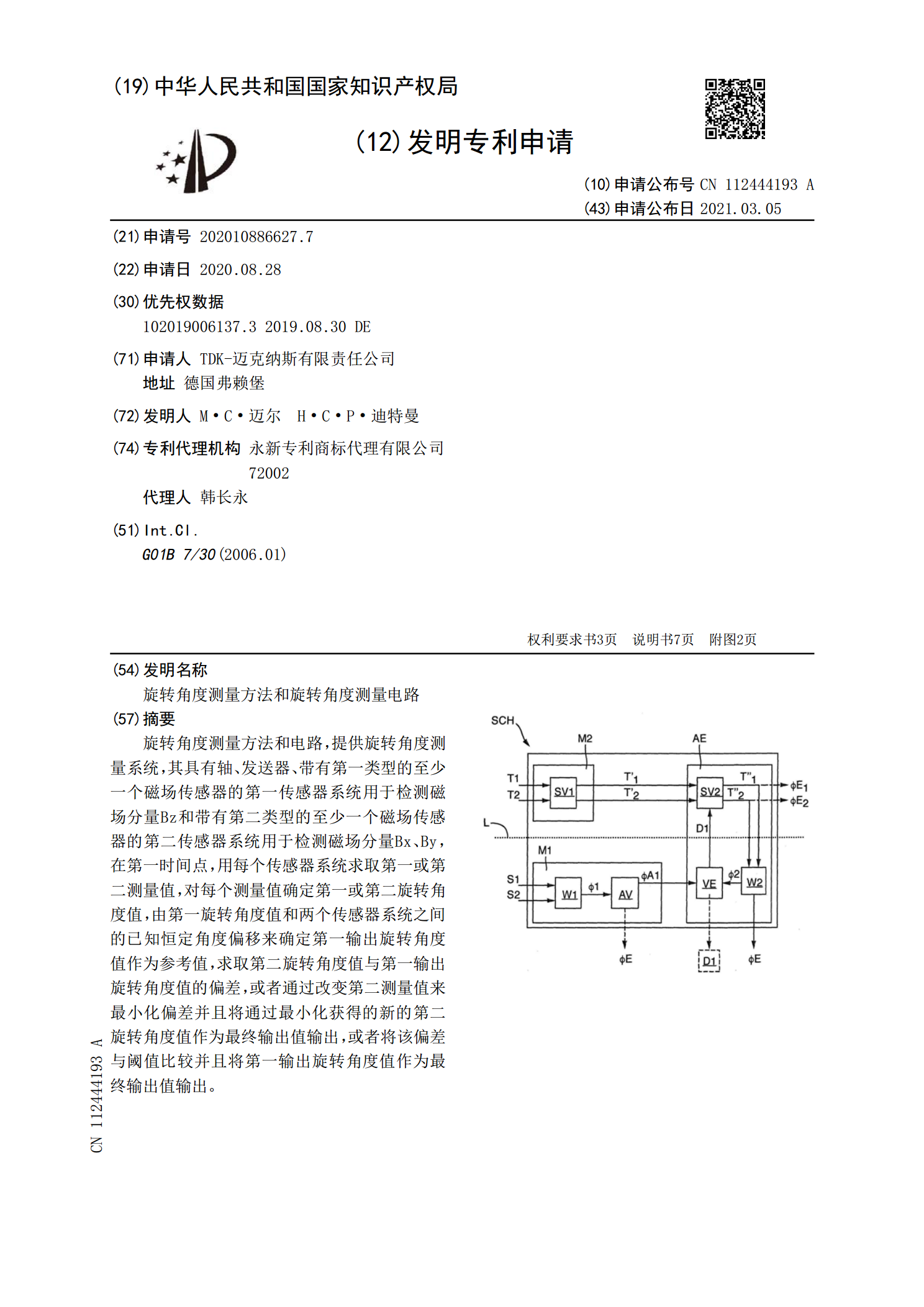
旋转角度测量方法和电路,提供旋转角度测量系统,其具有轴、发送器、带有第一类型的至少一个磁场传感器的第一传感器系统用于检测磁场分量Bz和带有第二类型的至少一个磁场传感器的第二传感器系统用于检测磁场分量Bx、By,在第一时间点,用每个传感器系统求取第一或第二测量值,对每个测量值确定第一或第二旋转角度值,由第一旋转角度值和两个传感器系统之间的已知恒定角度偏移来确定第一输出旋转角度值作为参考值,求取第二旋转角度值与第一输出旋转角度值的偏差,或者通过改变第二测量值来最小化偏差并且将通过最小化获得的新的第二旋转角度值

一种齿轮旋转角度测量方法及装置.pdf
本申请提供一种齿轮旋转角度测量方法及装置,该装置通过获取与被测齿轮啮合的第一齿轮旋转的第一角度,以及与被测齿轮啮合的第二齿轮旋转的第二角度,利用第一角度和第二角度对预先设置的第一测量公式进行圆整处理,得到第一测量公式的圆整值;进而利用第一测量公式的圆整值和预先设置的第二测量公式计算得到被测齿轮的旋转角度,以实现对被测齿轮的旋转角度的测量。并且,本申请通过圆整处理可有效减小第一角度和/或第二角度的测量误差,提高测量结果的准确性。

镜管可旋转的内窥镜.pdf
本发明涉及一种镜体与镜管可以相对转动,观察无阻碍的内窥镜。一种镜管可旋转的内窥镜,包括镜管、镜体,镜管和镜体连接处设有旋转转轮,旋转转轮与镜管固定连接,旋转转轮与镜体活动连接,旋转转轮与镜管之间设有固定件,在镜管与固定件之间设有与镜管连接且同步旋转的镜管光纤定位件,在镜管与镜体之间设有与镜体固定连接的镜体光纤定位件,在镜管光纤定位件和镜体光纤定位件内均设有光纤环。本发明提供了一种结构简单,镜管相对镜体可以任意角度旋转,观察和照明始终同步,使用方便,不受场地的限制,检查全面的镜管可旋转的内窥镜;解决了现有技