
一种步进电机控制方法及装置.pdf

贤惠****66

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种步进电机控制方法及装置.pdf
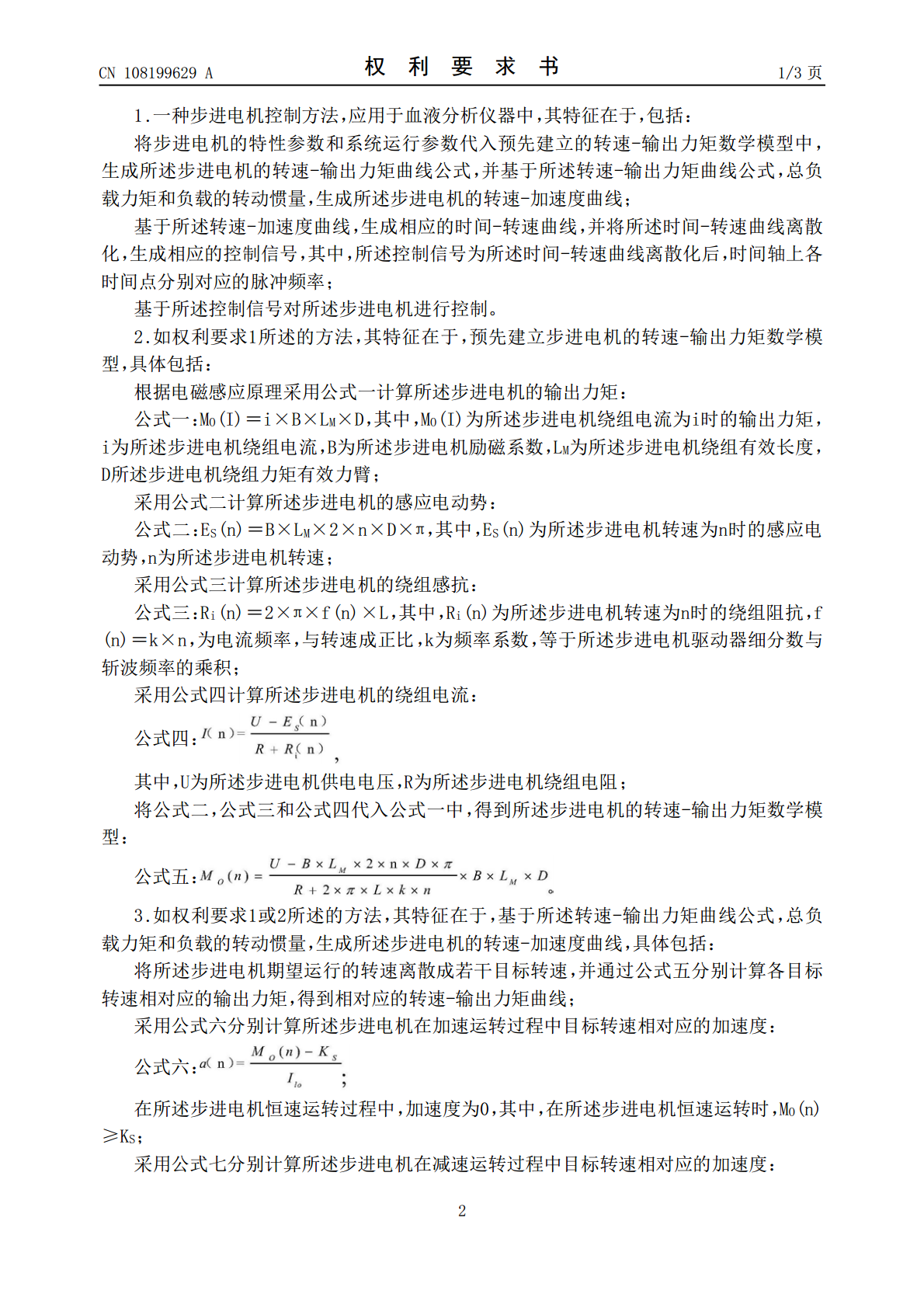
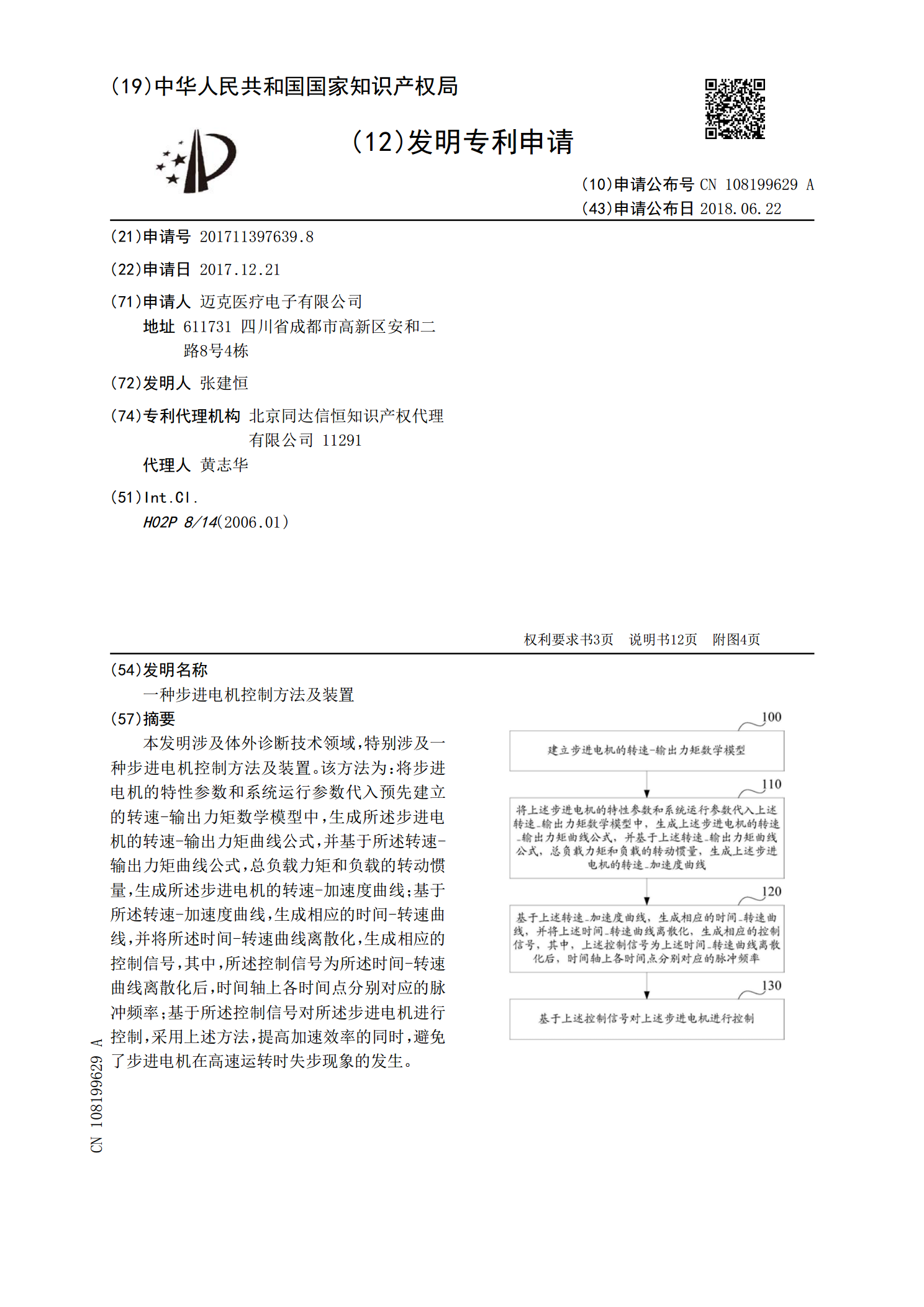
本发明涉及体外诊断技术领域,特别涉及一种步进电机控制方法及装置。该方法为:将步进电机的特性参数和系统运行参数代入预先建立的转速‑输出力矩数学模型中,生成所述步进电机的转速‑输出力矩曲线公式,并基于所述转速‑输出力矩曲线公式,总负载力矩和负载的转动惯量,生成所述步进电机的转速‑加速度曲线;基于所述转速‑加速度曲线,生成相应的时间‑转速曲线,并将所述时间‑转速曲线离散化,生成相应的控制信号,其中,所述控制信号为所述时间‑转速曲线离散化后,时间轴上各时间点分别对应的脉冲频率;基于所述控制信号对所述步进电机进行控

步进电机控制方法、装置及存储介质.pdf
本申请涉及一种步进电机控制方法、装置及存储介质,属于电机控制技术领域,该方法包括:接收步进电机的控制信号,所述控制信号用于控制所述步进电机的开启或关闭;基于所述控制信号控制所述步进电机匀加速或匀减速运行;在所述步进电机的速度更新至目标速度时,控制所述步进电机以所述控制信号指示的方式工作;可以解决电机的瞬间开启和关闭出现丢步现象,导致的降低控制电机的准确度的问题;由于步进电机在开机过程中匀加速运行、在关机过程中匀减速运行,步进电机的开关过程存在速度变化的缓冲阶段,此时,步进电机不会产生较大的冲击,降低步进电
步进电机闭环控制方法和装置.pdf
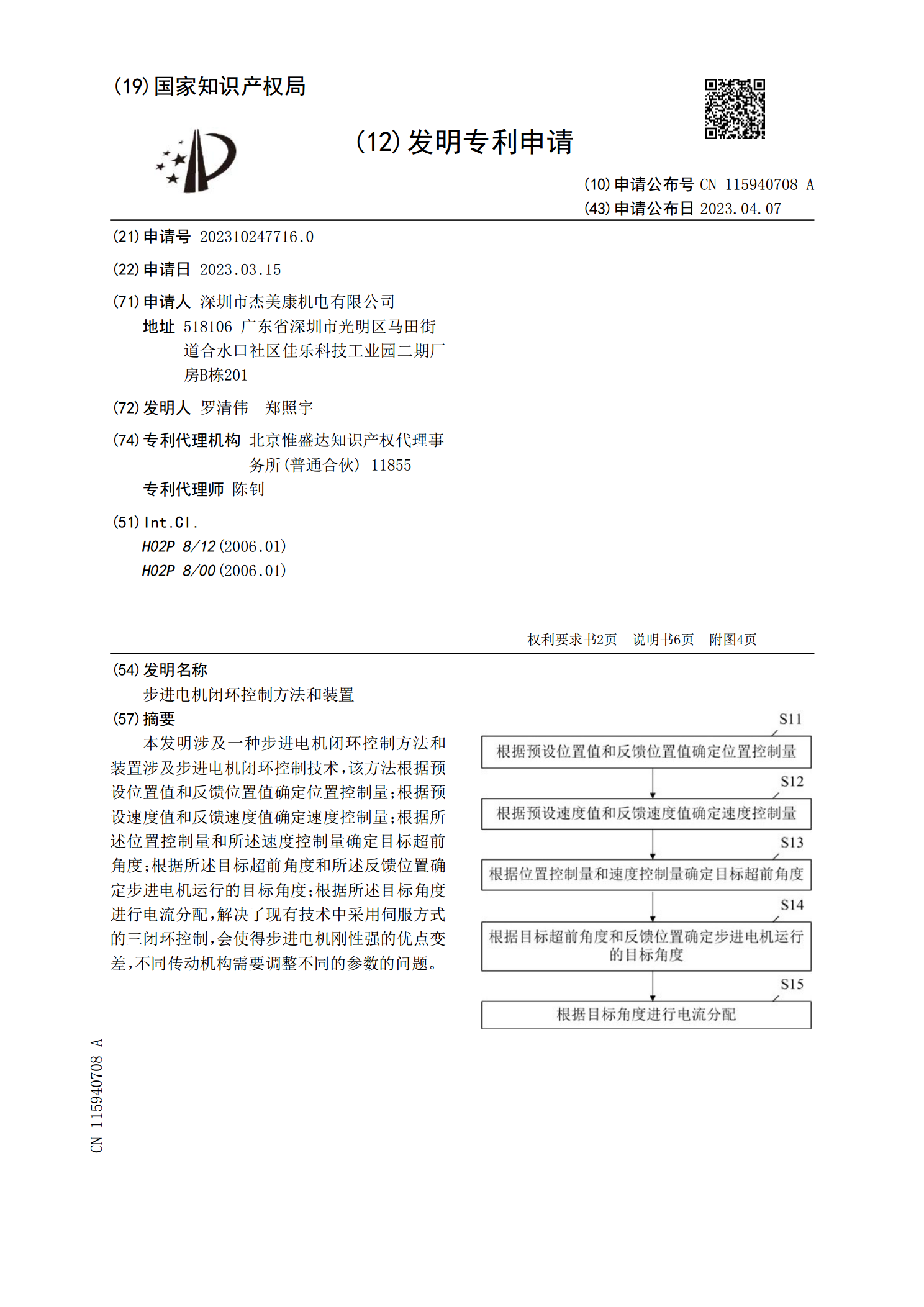
本发明涉及一种步进电机闭环控制方法和装置涉及步进电机闭环控制技术,该方法根据预设位置值和反馈位置值确定位置控制量;根据预设速度值和反馈速度值确定速度控制量;根据所述位置控制量和所述速度控制量确定目标超前角度;根据所述目标超前角度和所述反馈位置确定步进电机运行的目标角度;根据所述目标角度进行电流分配,解决了现有技术中采用伺服方式的三闭环控制,会使得步进电机刚性强的优点变差,不同传动机构需要调整不同的参数的问题。

探头内步进电机的控制方法和装置.pdf
本发明公开了一种探头内步进电机的控制方法和装置,所述方法包括:位于探头的中间位置的光电开关输出步进电机的位置信号MP1;覆盖所述探头的第一侧的复数对光电开关通过与门连接,输出所述步进电机的位置信号MP2;若所述MP1为低电平,判定所述步进电机位于所述探头的中间位置,否则,根据所述MP2,控制所述步进电机向所述中间位置的方向移动一步。本发明的方案,能够确保不管探头上电后电机处于何种状态,或者不论上次扫查是否是精准的停留在探头的中间位置,都能很快地检测到当前电机的位置,并且根据此位置来找到探头的中间位置,进而

一种新型的步进电机控制方法.docx
一种新型的步进电机控制方法一种新型的步进电机控制方法摘要:步进电机广泛应用于各种机械设备中,其高精度和可编程性使其成为自动化系统中的重要组成部分。然而,传统的步进电机控制方法存在一些问题,例如运动平滑性和动态响应速度等方面的限制。本论文提出了一种新型的步进电机控制方法,结合了模糊控制和PID控制的优势,以解决传统控制方法存在的问题。通过实验验证,该方法具有更高的运动平滑性和更快的动态响应速度,可以有效提高步进电机的性能。关键词:步进电机,控制方法,模糊控制,PID控制,运动平滑性,动态响应速度1.引言步进