
一种C形臂X射线机三维成像的运动方法.pdf

一只****呀9


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种C形臂X射线机三维成像的运动方法.pdf
本发明涉及一种C形臂X射线机三维成像的运动方法。所述方法包括:C形臂X射线机的C臂置于C滑行程的一个极限端;球管焦点发出X射线开始曝光;C形臂X射线机的横滑装置、底座升降柱进行联动,使得目标物体位于X射线靶角区域内;所述横滑装置、所述底座升降柱、所述C臂进行联动,所述C臂沿着C臂托架滑动到C滑行程的另一个极限端;使得所述球管焦点的轨迹是以所述目标物体中心为圆心,以所述球管焦点到所述目标物体中心的距离为半径的圆弧轨迹;所述球管焦点停止发出所述X射线,曝光结束,得到平板检测器输出的目标物体的三维图像。本发明使

具有C形臂的装置和X射线成像器.pdf
本发明公开了具有C形臂的装置和X射线成像器。本发明提供具有C形臂(1)的装置,C形臂(1)包括主体(2),该主体(2)的横截面轮廓形成为双H形,主体(2)的外壁(3)、内壁(4)和两个侧壁(5)形成矩形腔体(6)。该装置还包括设置在主体(2)上的运行线(8),以及在运行线(8)上滚动的运行滚子(7),C形臂(1)可移动地安装在运行滚子(7)上。运行线(8)和运行滚子(7)以下述方式设置:由运行滚子(7)产生的作用在运行线(8)上的安装力的至少百分之五十被引入至主体(2)的侧壁(5)中。本发明还提供具有这样

一种C形臂及X射线设备.pdf
本发明公开一种C形臂及X射线设备。该C形臂包括底座、C臂和连接在C臂上的平板探测器及X射线发射器,还包括:第一支架和第二支架,第一支架通过第一转轴可旋转的安装在底座上;第二支架通过第二转轴可旋转的安装在第一支架上;C臂连接在第二支架上;第一支架和第二支架转动时,带动C臂的圆心移动。本发明的C形臂及X射线设备,通过多轴联动增加了X射线的照射范围,减少了图像采集的难度。

一种刻度指示装置及C臂X射线机.pdf
本发明公开了一种刻度指示装置及C臂X射线机。其中,刻度指示装置包括:从动轮、与被测旋转轴同步旋转的主动轮、以及与所述主动轮和从动轮相配合的带有刻度值的传动带;所述传动带上的刻度值用于指示所述被测旋转轴的旋转角度。本发明所公开的刻度指示装置能够方便使用者进行刻度察看。
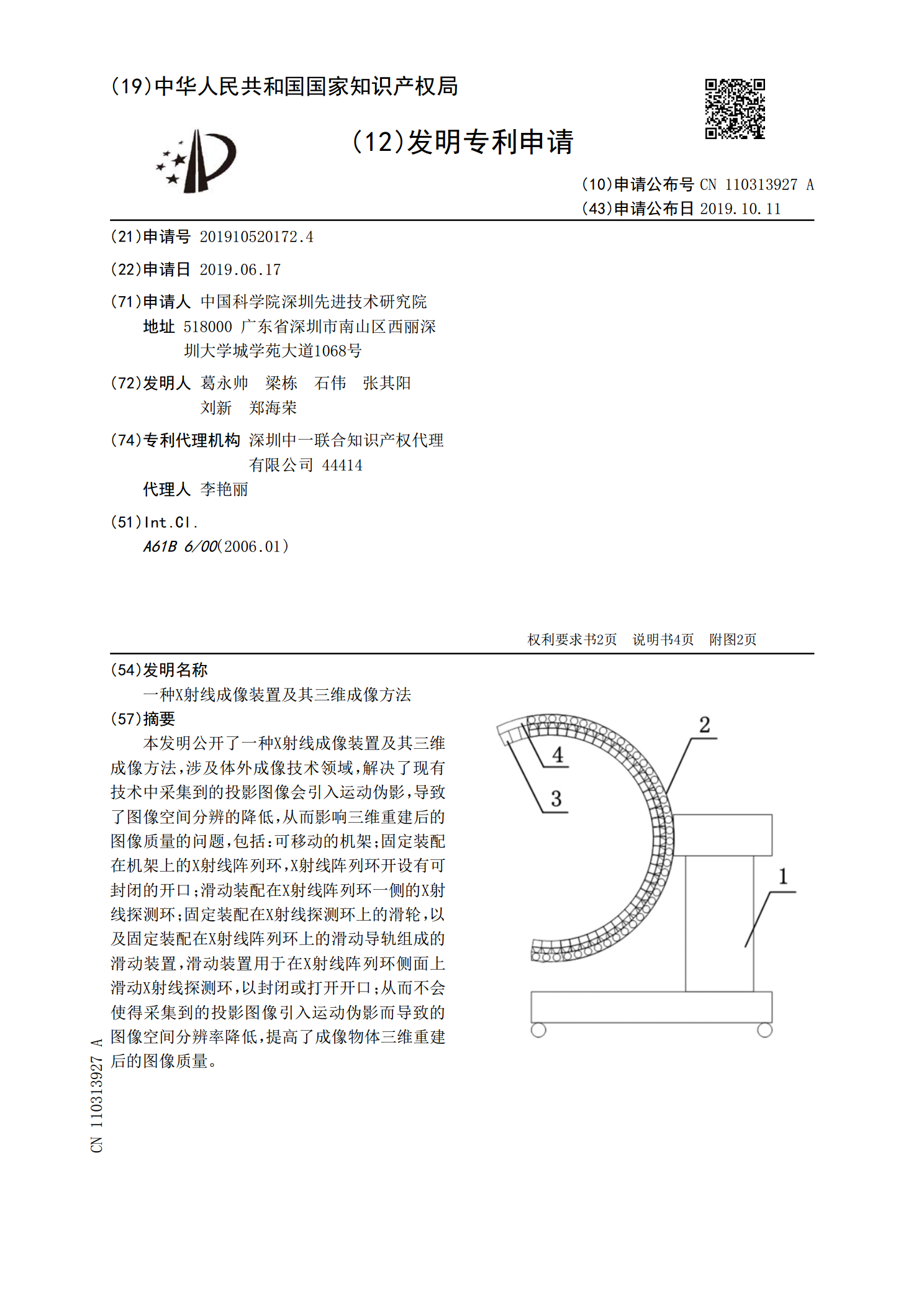
一种X射线成像装置及其三维成像方法.pdf
本发明公开了一种X射线成像装置及其三维成像方法,涉及体外成像技术领域,解决了现有技术中采集到的投影图像会引入运动伪影,导致了图像空间分辨的降低,从而影响三维重建后的图像质量的问题,包括:可移动的机架;固定装配在机架上的X射线阵列环,X射线阵列环开设有可封闭的开口;滑动装配在X射线阵列环一侧的X射线探测环;固定装配在X射线探测环上的滑轮,以及固定装配在X射线阵列环上的滑动导轨组成的滑动装置,滑动装置用于在X射线阵列环侧面上滑动X射线探测环,以封闭或打开开口;从而不会使得采集到的投影图像引入运动伪影而导致的图