
智能物流系统用自动笼车倾倒装置及笼车翻转方法.pdf

一吃****永贺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能物流系统用自动笼车倾倒装置及笼车翻转方法.pdf
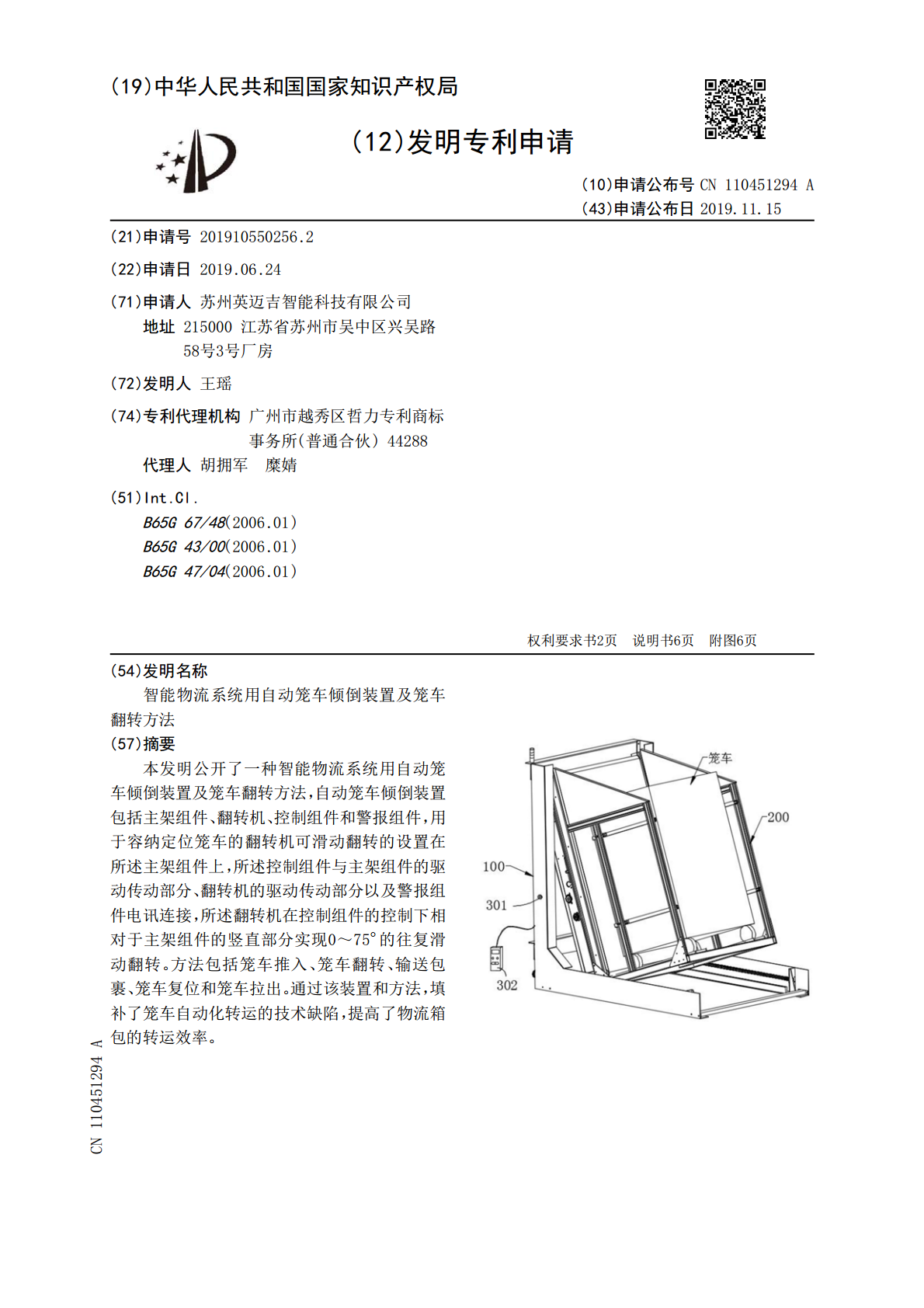
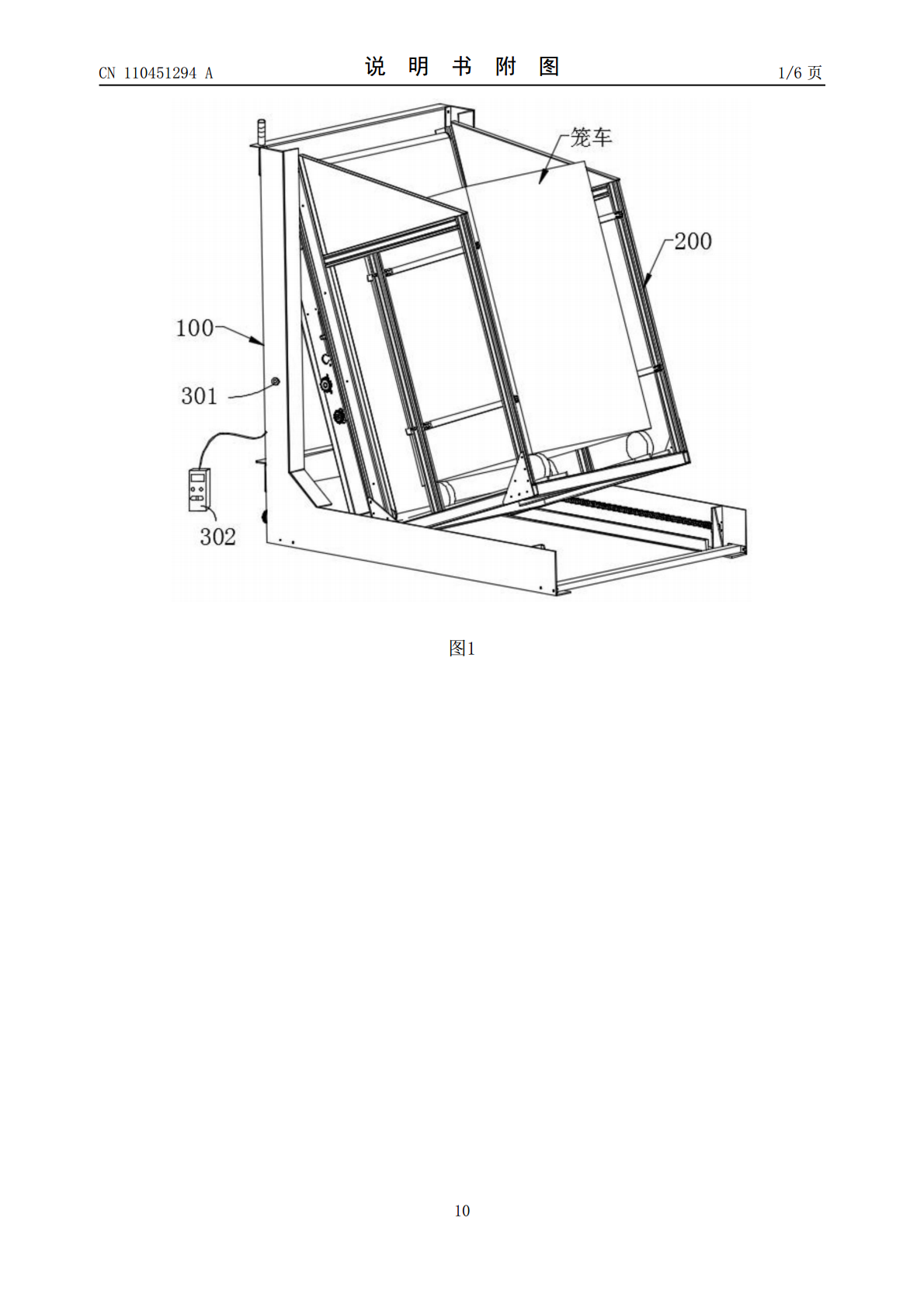
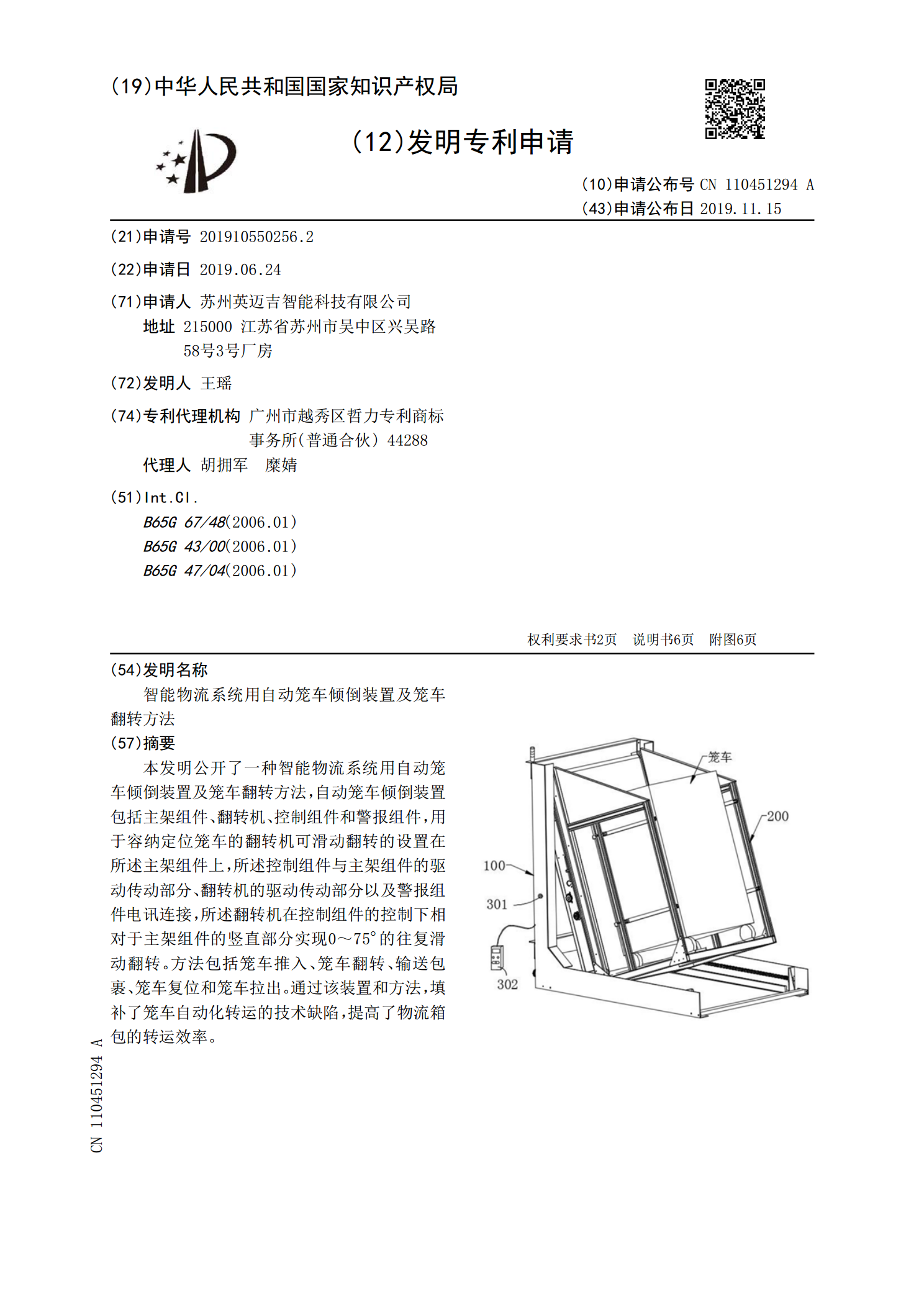
本发明公开了一种智能物流系统用自动笼车倾倒装置及笼车翻转方法,自动笼车倾倒装置包括主架组件、翻转机、控制组件和警报组件,用于容纳定位笼车的翻转机可滑动翻转的设置在所述主架组件上,所述控制组件与主架组件的驱动传动部分、翻转机的驱动传动部分以及警报组件电讯连接,所述翻转机在控制组件的控制下相对于主架组件的竖直部分实现0~75°的往复滑动翻转。方法包括笼车推入、笼车翻转、输送包裹、笼车复位和笼车拉出。通过该装置和方法,填补了笼车自动化转运的技术缺陷,提高了物流箱包的转运效率。

笼车自动翻转输送装置.pdf
本发明涉及一种自动翻转装置,尤其是笼车自动翻转输送装置,包括笼车自动翻转装置和胶带输送机,笼车自动翻转装置安装在胶带输送机的一端;笼车自动翻转装置将笼车从水平0°的状态翻转至与水平成120~150°的状态,将笼车内的货物倾倒至胶带输送机上。支撑架固定在胶带输送机的一端,通过翻转轴与翻转支架活动连接;升降装置安装在翻转支架上;锁紧装置对称安装在翻转支架的两侧;翻转装置安装在支撑架与翻转支架之间。本发明提供的笼车自动翻转输送装置能满足电商、快递等行业的快速卸货需求,大大地提高了笼车卸货的效率,整个卸货过程无需
人工辅助拆装笼车装置及其方法.pdf
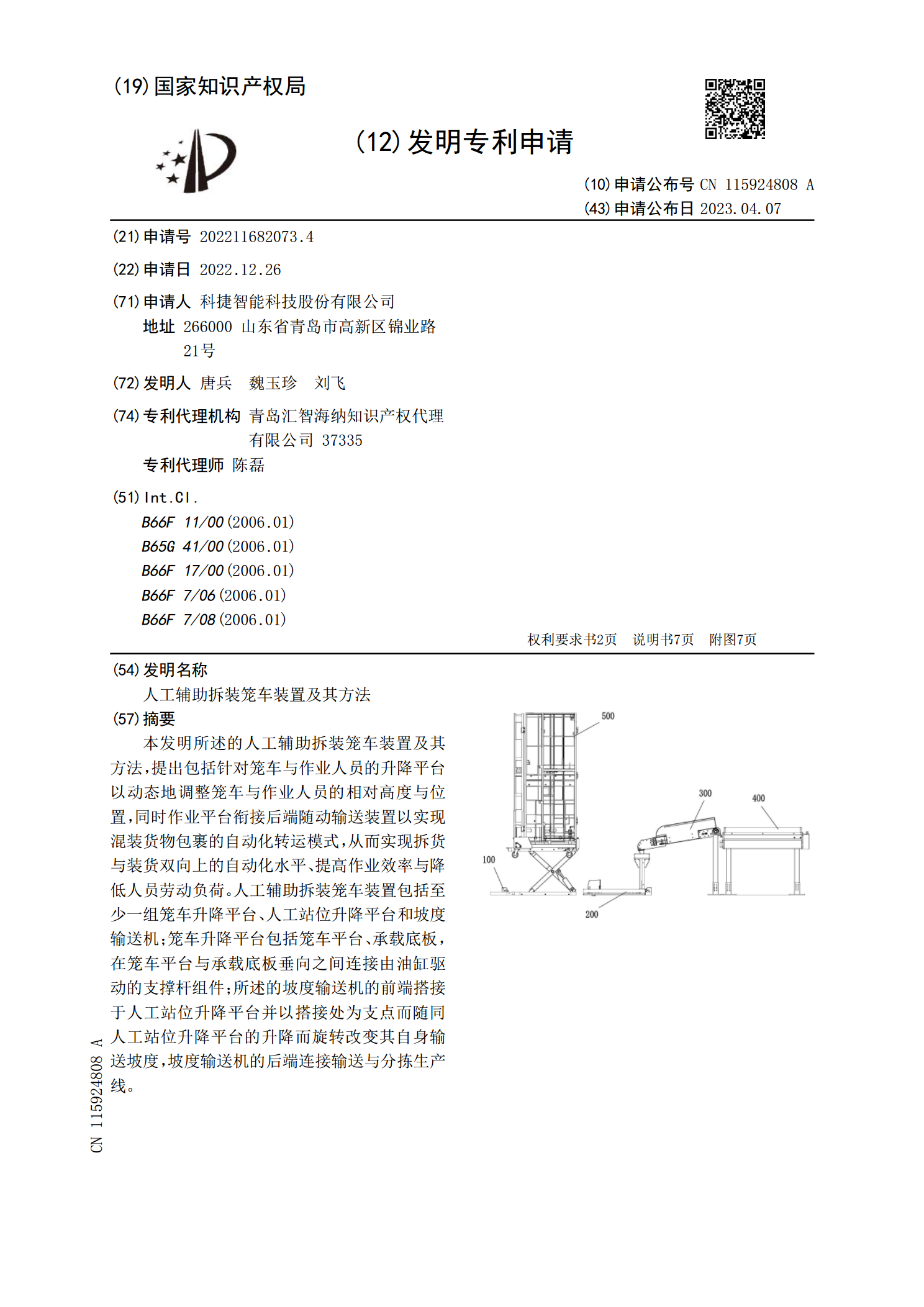
本发明所述的人工辅助拆装笼车装置及其方法,提出包括针对笼车与作业人员的升降平台以动态地调整笼车与作业人员的相对高度与位置,同时作业平台衔接后端随动输送装置以实现混装货物包裹的自动化转运模式,从而实现拆货与装货双向上的自动化水平、提高作业效率与降低人员劳动负荷。人工辅助拆装笼车装置包括至少一组笼车升降平台、人工站位升降平台和坡度输送机;笼车升降平台包括笼车平台、承载底板,在笼车平台与承载底板垂向之间连接由油缸驱动的支撑杆组件;所述的坡度输送机的前端搭接于人工站位升降平台并以搭接处为支点而随同人工站位升降平台

笼车.pdf
本发明公开了一种笼车,包括底板1、侧板4,所述侧板4为两块且设置在底板1相向的两条边上;所述底板1包括设置在底板1顶面四个角的第一插销2,设置在底板1底面四个角的车轮3;每个所述侧板4包括分别设置在侧板4两端底部的插孔7。本发明所公开的笼车,能够在保证较大承重能力的前提下,实现折叠结构小巧,自行车、电动自行车等小型的交通工具也能够方便地携带或运输的目的。

钢筋笼转运车.pdf
本发明的钢筋笼转运车,包括车架,车架底部设置有支腿,支腿底部连接行走轮,行走轮的轮轴通过轴承安装在轴壳内;其特征在于:车架上部设有方向盘和驾驶座;车架上部还设有液压泵和连夜液压泵的前后两个液压缸,前后两个液压缸的活塞杆分别连接一条钢丝绳,钢丝绳绕过车架上的定滑轮,钢丝绳末端连接用于挂住钢筋笼的挂钩;车架上部还安装有行走动力装置,用于驱动行走轮。本发明的有益效果是,结构简单、使用方便,省时省力,能够方便的吊起钢筋笼,有人驾驶该车进行运输钢筋笼,在空间狭窄的场合也能方便的搬运钢筋笼,提高了工作效率,节约人力物