
外骨骼机器人的步态控制方法、控制系统及外骨骼机器人.pdf

玉军****la


1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

外骨骼机器人的步态控制方法、控制系统及外骨骼机器人.pdf
本发明提供了一种外骨骼机器人的步态控制方法、控制系统及外骨骼机器人,其中,步态控制方法包括:设置步长、步高;根据所述步长和所述步高,采用样条曲线拟合生成摆动腿的足底摆动轨迹,根据所述足底摆动轨迹,采用三角函数关系计算所述摆动腿的髋关节摆动角度和膝关节摆动角度,并控制摆动腿按照计算的角度执行步行动作。本发明规划的步态符合人体运动规律;并且能针对个体的不同,规划出相适应的足底步态轨迹,调整方便。
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
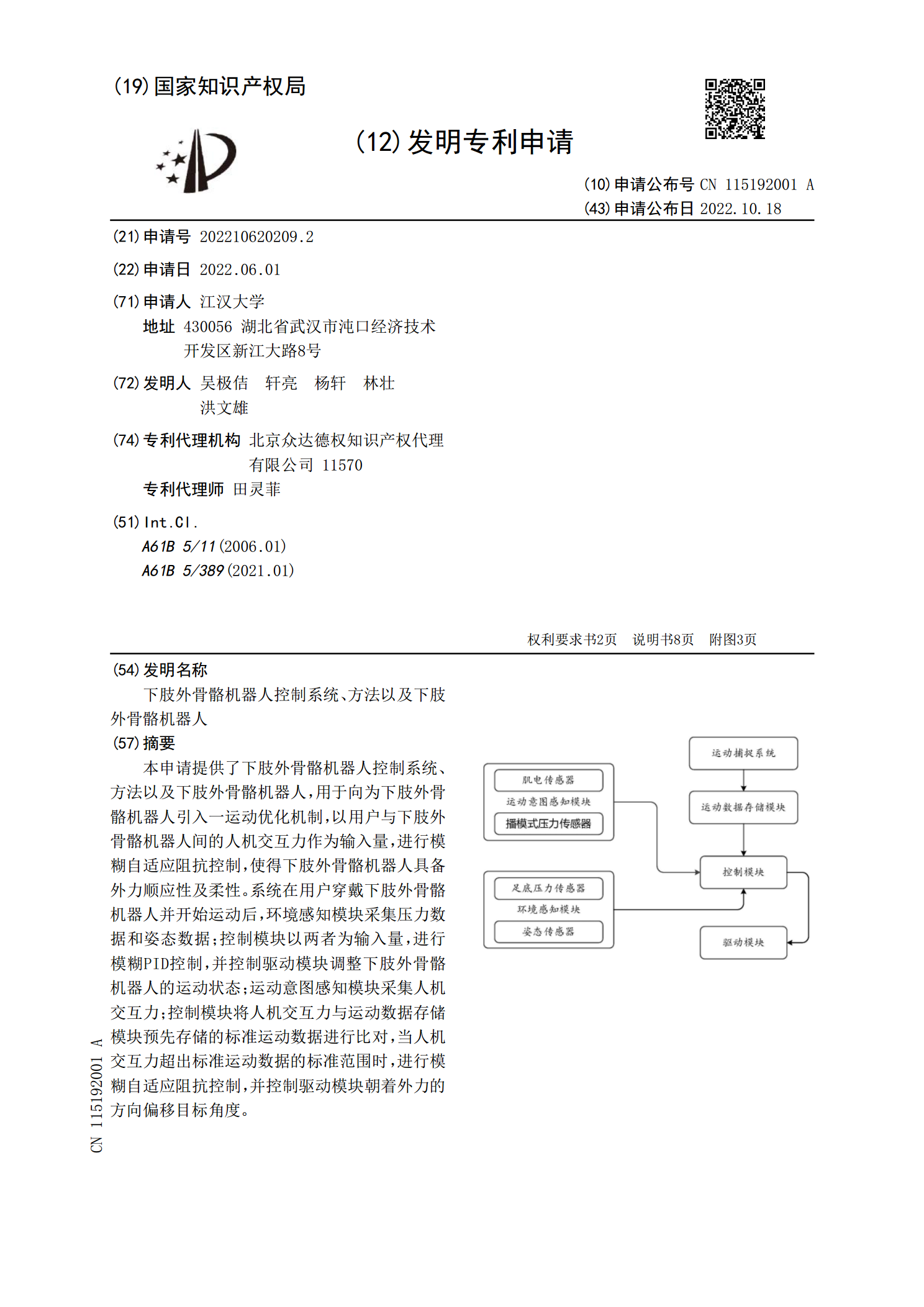
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超

下肢外骨骼机器人控制系统设计与步态实现的开题报告.docx
下肢外骨骼机器人控制系统设计与步态实现的开题报告一、研究背景与意义随着人类社会的进步,增强人体功能的辅助装置越来越受到关注。下肢外骨骼机器人作为一种辅助设备,可以帮助行动不便的人完成站立、行走等运动动作。因此,开发下肢外骨骼机器人已成为当前科技研究的热点之一。为了更好地促进下肢外骨骼机器人的应用,需要探索先进的控制技术。对于下肢外骨骼机器人的控制技术,关键在于如何实现稳定、自然的步态。因此,设计一种高效可靠的下肢外骨骼机器人控制系统,并实现人体自然步态成为了研究的重要课题。二、研究内容本研究旨在设计一种高
个性化步态生成方法存储介质、控制系统及外骨骼机器人.pdf
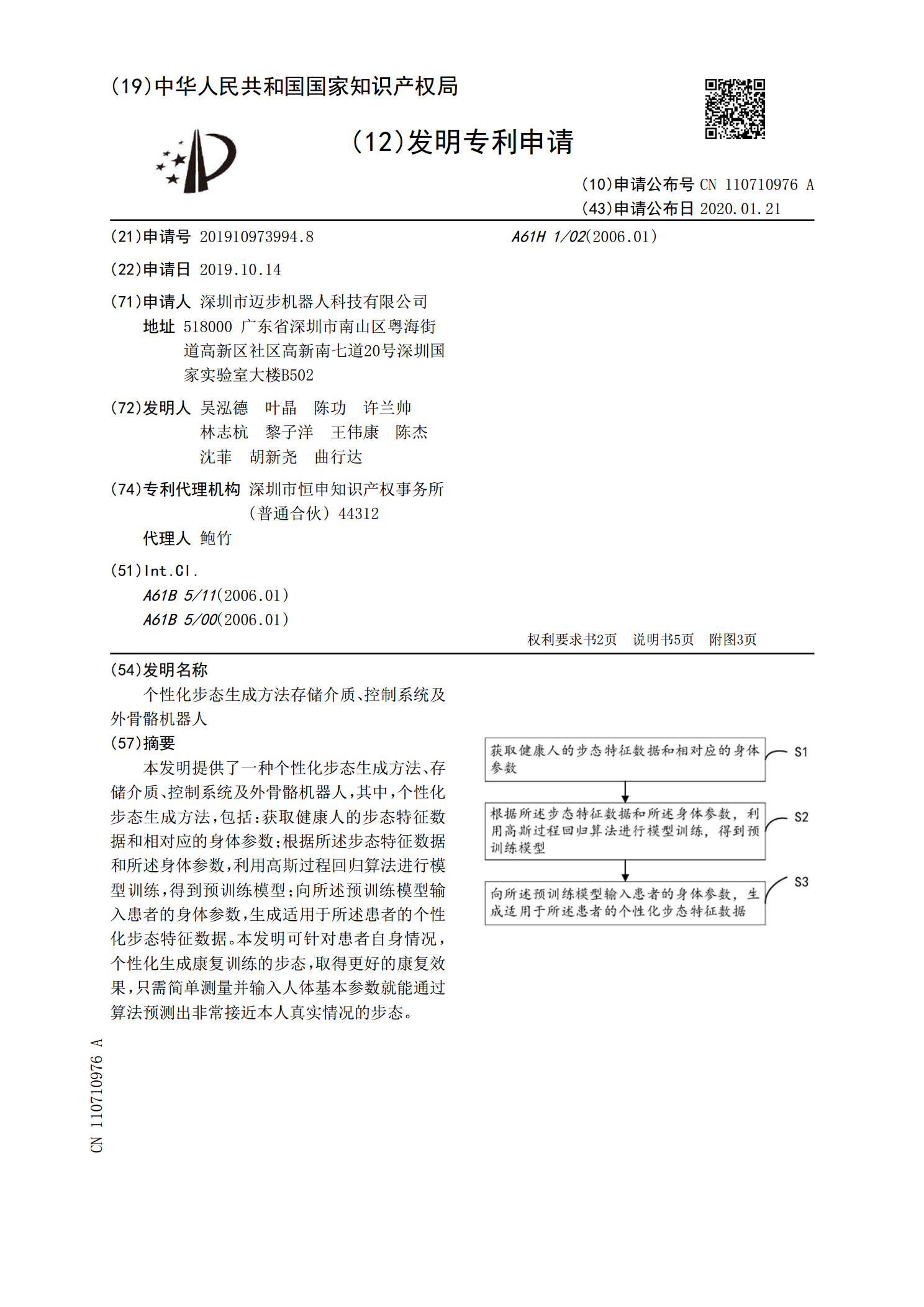
本发明提供了一种个性化步态生成方法、存储介质、控制系统及外骨骼机器人,其中,个性化步态生成方法,包括:获取健康人的步态特征数据和相对应的身体参数;根据所述步态特征数据和所述身体参数,利用高斯过程回归算法进行模型训练,得到预训练模型;向所述预训练模型输入患者的身体参数,生成适用于所述患者的个性化步态特征数据。本发明可针对患者自身情况,个性化生成康复训练的步态,取得更好的康复效果,只需简单测量并输入人体基本参数就能通过算法预测出非常接近本人真实情况的步态。

下肢助行外骨骼机器人的控制方法及外骨骼机器人.pdf
本发明提供了一种下肢助行外骨骼机器人的控制方法及外骨骼机器人,其中,控制方法,包括:检测腿部关节的角度;检测外骨骼机器人和用户的整体的质心的位置;检测步行过程中足底的压力,包括右腿足底承受的第一压力F