
图像检测方法、装置、设备及可读存储介质.pdf

斌斌****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

图像检测方法、装置、设备及可读存储介质.pdf
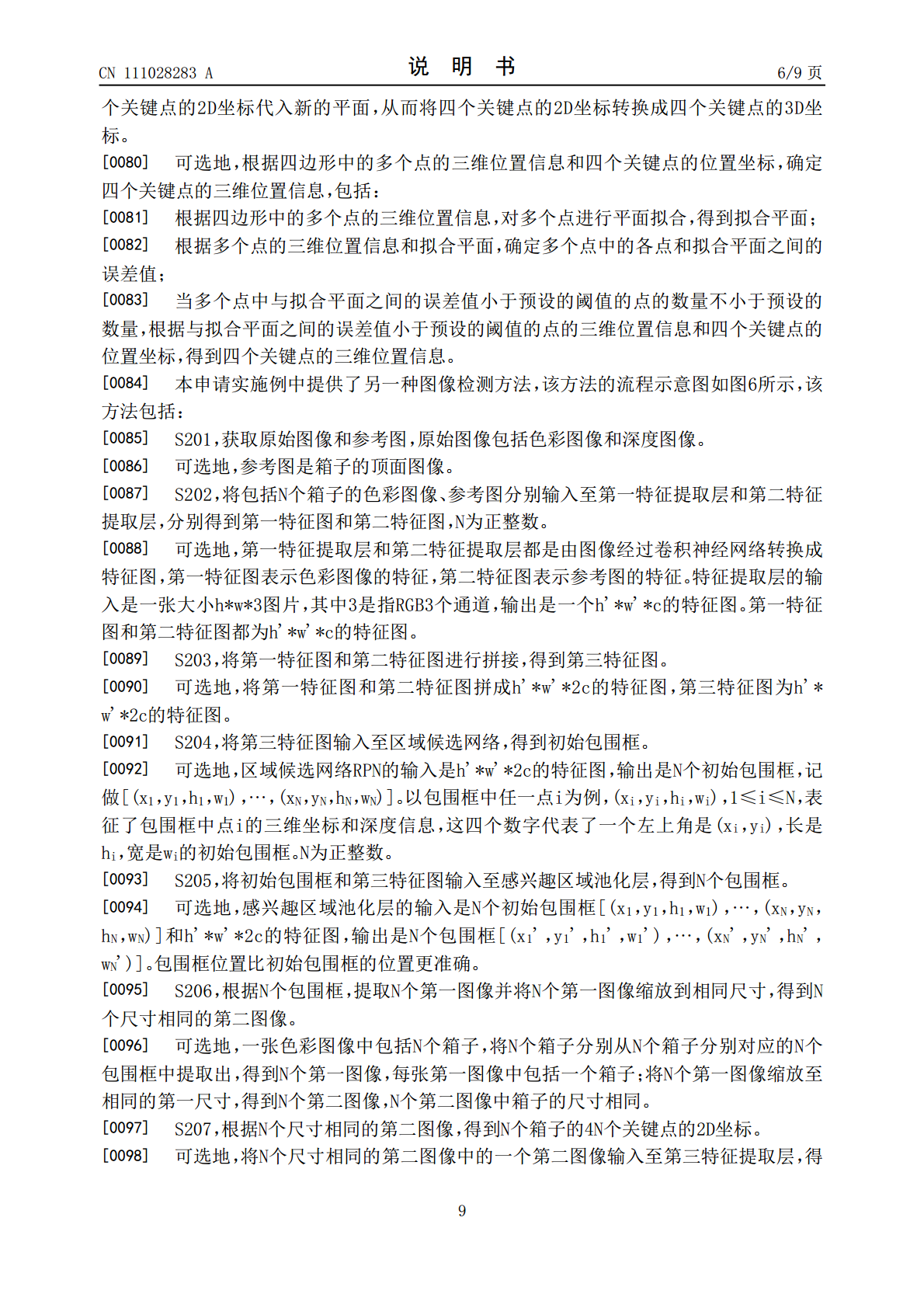
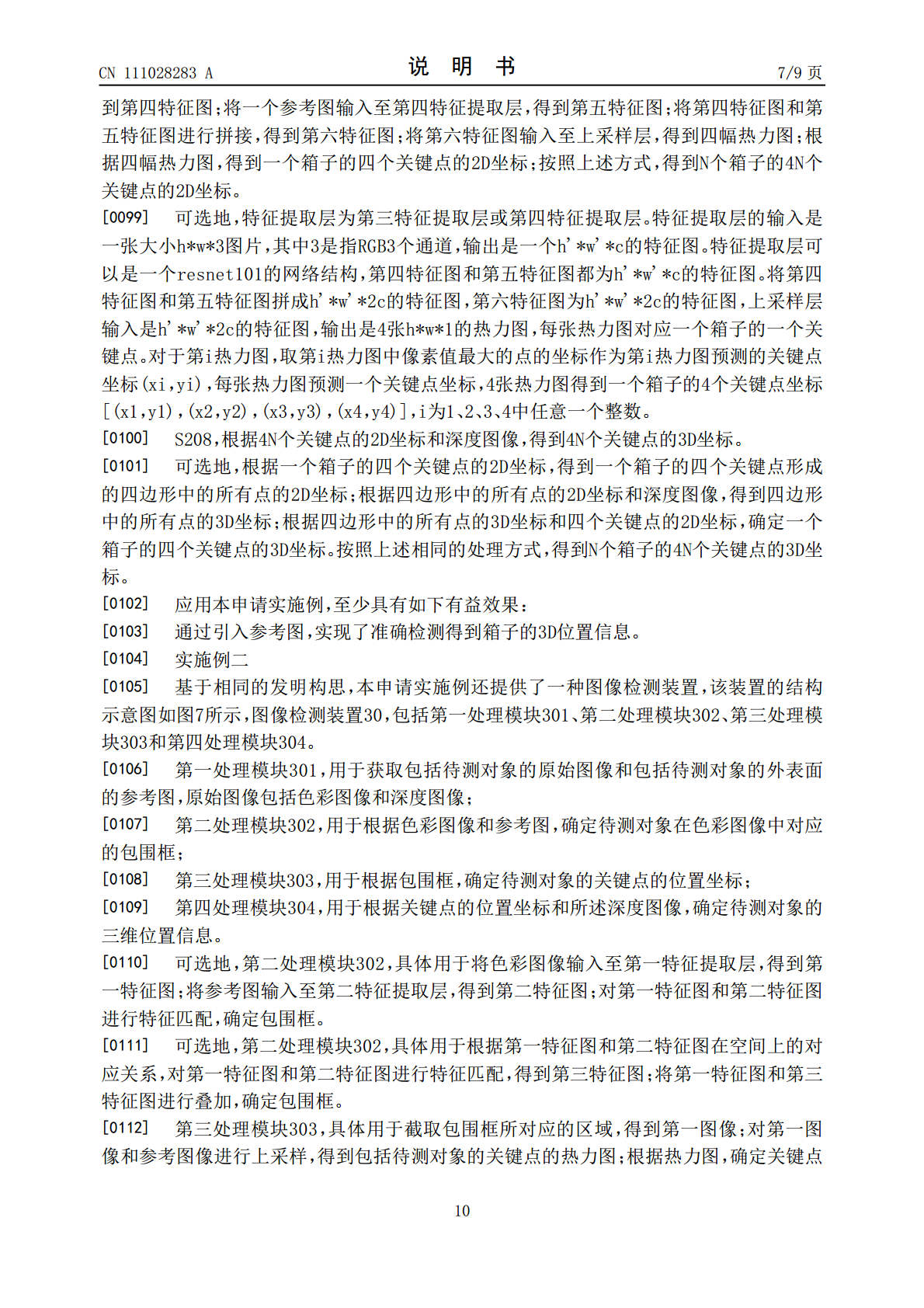
本申请实施例提供了图像检测方法、装置、设备及计算机可读存储介质,该方法包括:获取包括待测对象的原始图像和包括待测对象的外表面的参考图,原始图像包括色彩图像和深度图像;根据色彩图像和参考图,确定待测对象在色彩图像中对应的包围框;根据包围框,确定待测对象的关键点的位置坐标;根据关键点的位置坐标和深度图像,确定待测对象的三维位置信息。该方法通过引入参考图,实现了准确检测得到待测对象的位置信息。
图像检测方法、装置、设备及可读存储介质.pdf
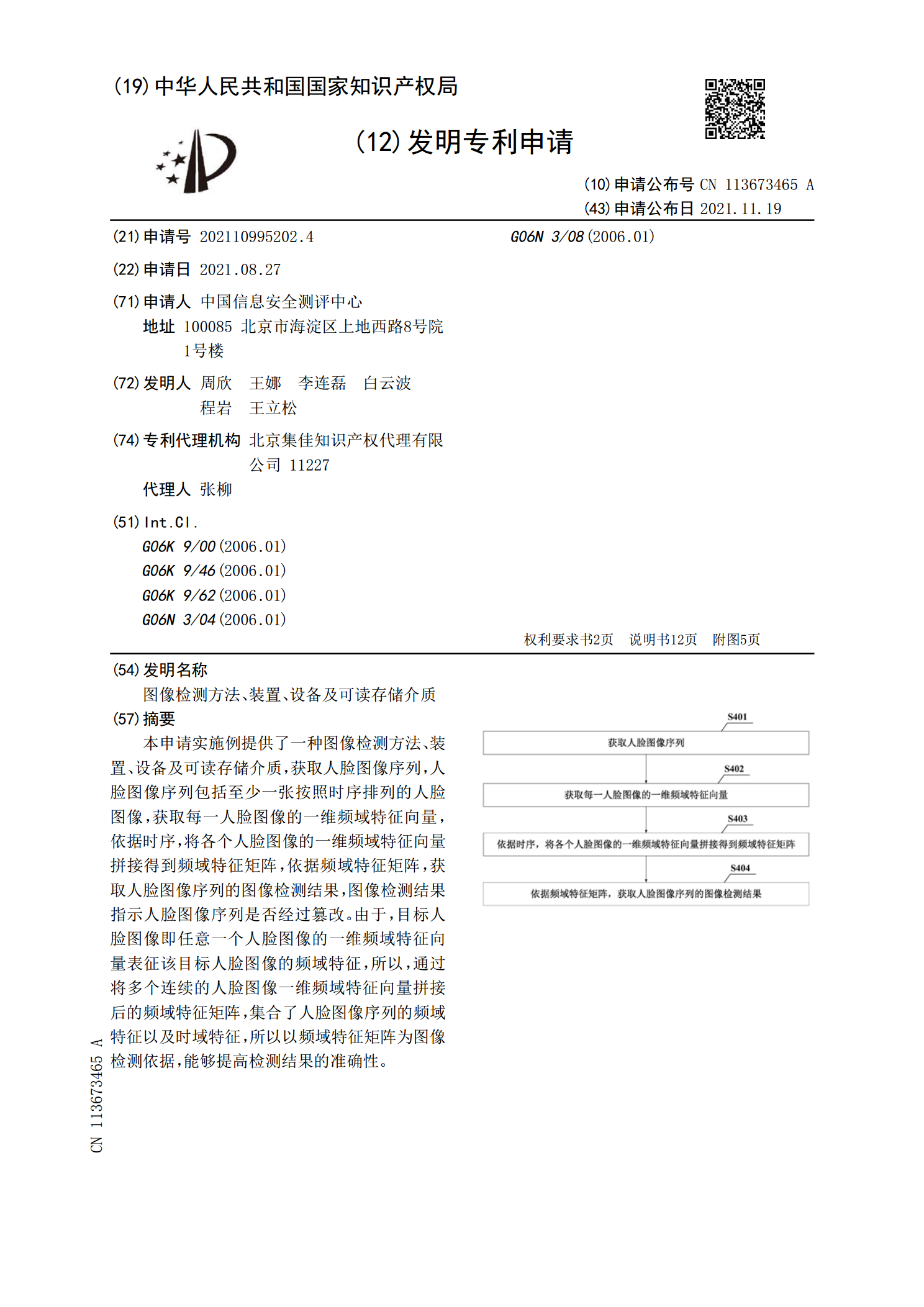
本申请实施例提供了一种图像检测方法、装置、设备及可读存储介质,获取人脸图像序列,人脸图像序列包括至少一张按照时序排列的人脸图像,获取每一人脸图像的一维频域特征向量,依据时序,将各个人脸图像的一维频域特征向量拼接得到频域特征矩阵,依据频域特征矩阵,获取人脸图像序列的图像检测结果,图像检测结果指示人脸图像序列是否经过篡改。由于,目标人脸图像即任意一个人脸图像的一维频域特征向量表征该目标人脸图像的频域特征,所以,通过将多个连续的人脸图像一维频域特征向量拼接后的频域特征矩阵,集合了人脸图像序列的频域特征以及时域特

图像处理方法、装置、设备及可读存储介质.pdf
本公开实施例提供一种图像处理方法、装置、设备及可读存储介质,电子设备获取到源图像后,基于源图像生成灰度图,对灰度图进行高斯模糊,得到高斯模糊图。然后,电子设备利用高斯模糊图和灰度图,生成第一素描图像。采用该种方案,电子设备通过灰度处理、高斯模糊等的方式就能够得到第一素描图像,极大程度上保留了细节部分,使得第一素描图像逼真,且无需进行深度学习过程,效率高。
图像处理方法、装置、设备及可读存储介质.pdf
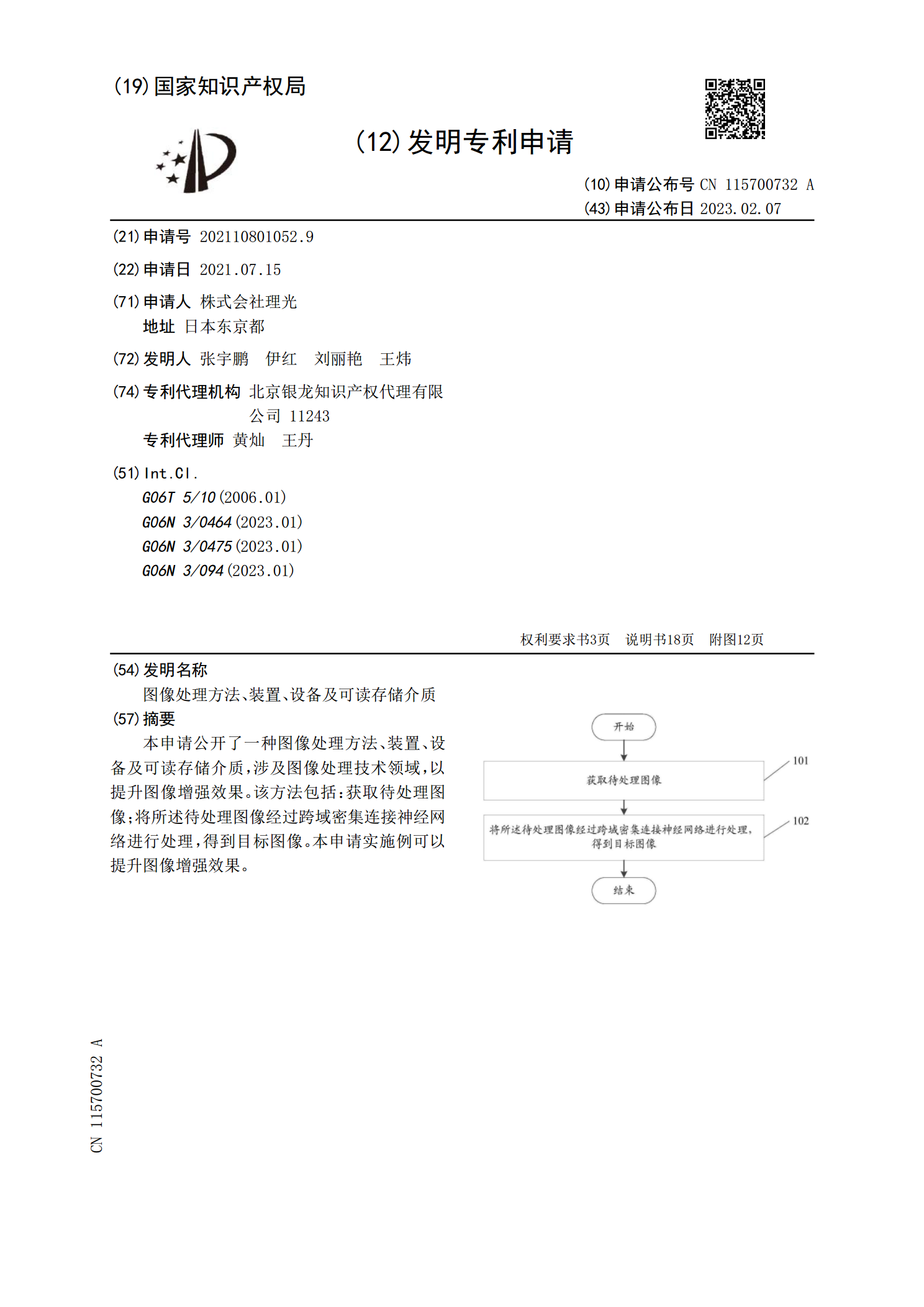
本申请公开了一种图像处理方法、装置、设备及可读存储介质,涉及图像处理技术领域,以提升图像增强效果。该方法包括:获取待处理图像;将所述待处理图像经过跨域密集连接神经网络进行处理,得到目标图像。本申请实施例可以提升图像增强效果。
图像渲染方法、装置、设备及可读存储介质.pdf
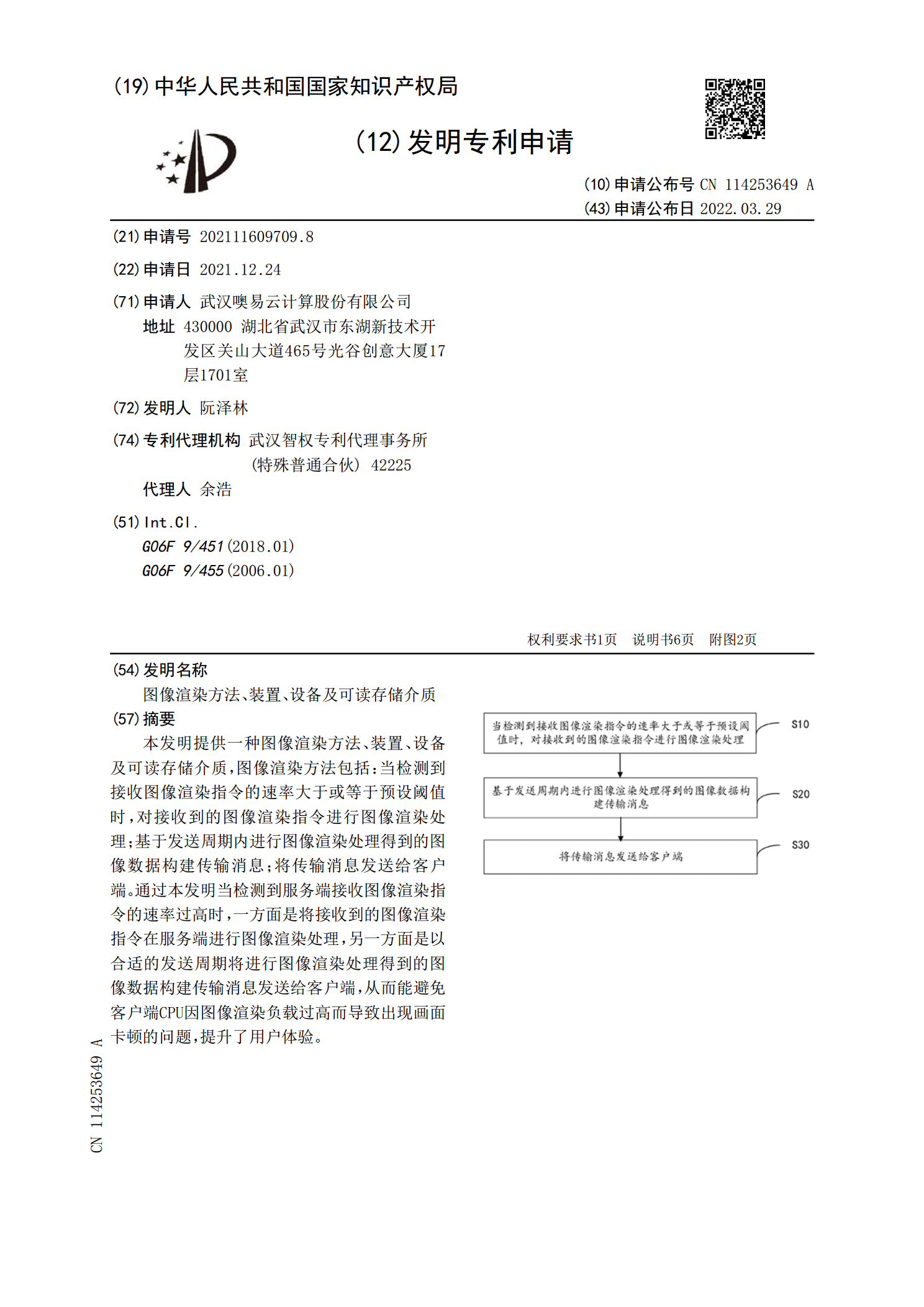
本发明提供一种图像渲染方法、装置、设备及可读存储介质,图像渲染方法包括:当检测到接收图像渲染指令的速率大于或等于预设阈值时,对接收到的图像渲染指令进行图像渲染处理;基于发送周期内进行图像渲染处理得到的图像数据构建传输消息;将传输消息发送给客户端。通过本发明当检测到服务端接收图像渲染指令的速率过高时,一方面是将接收到的图像渲染指令在服务端进行图像渲染处理,另一方面是以合适的发送周期将进行图像渲染处理得到的图像数据构建传输消息发送给客户端,从而能避免客户端CPU因图像渲染负载过高而导致出现画面卡顿的问题,提升