
穿戴式助行机器人.pdf

音景****ka


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

穿戴式助行机器人.pdf
一种穿戴式助行机器人,包括背负支架、电池盒、左腿支架、右腿支架、左机器人关节模组、右机器人关节模组、手动离合器、左下关节、右下关节、左压力开关和右压力开关;左机器人关节模组和右机器人关节模组相当于人体的左髋关节和右髋关节,当左、右手动离合器分离时,左髋关节和右髋关节分别自由活动,左膝关节和右膝关节分别自由活动,穿戴式助行机器人相当于无动力的人体外骨骼助行器,有效支撑旅行者的负担;当左、右手动离合器结合时,穿戴式助行机器人相当于有动力的人体外骨骼助行器,能按照本人的意图,准确控制外骨骼的迈步、行走与暂停,还

外骨骼穿戴式助力助行机器人技术综述.pptx
,CONTENTS01.02.技术定义技术起源技术原理技术特点03.技术发展背景技术发展历程技术发展现状技术发展趋势04.医疗康复领域军事领域工业领域体育领域其他领域05.技术挑战解决方案技术创新与突破技术发展前景展望06.对人类生活的影响对社会发展的价值对未来产业发展的影响与推动作用感谢您的观看!
穿戴式报警助行器.pdf
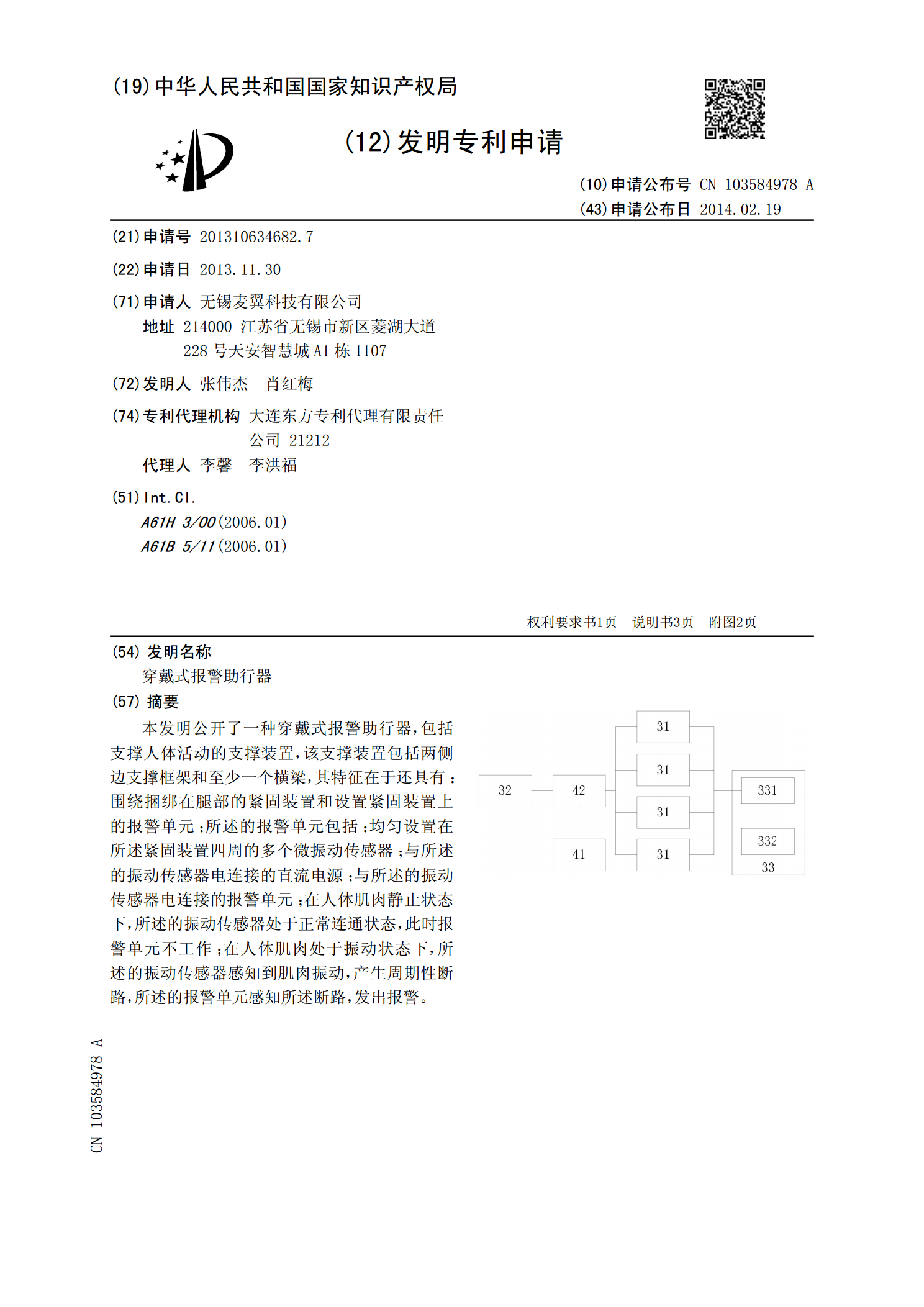
本发明公开了一种穿戴式报警助行器,包括支撑人体活动的支撑装置,该支撑装置包括两侧边支撑框架和至少一个横梁,其特征在于还具有:围绕捆绑在腿部的紧固装置和设置紧固装置上的报警单元;所述的报警单元包括:均匀设置在所述紧固装置四周的多个微振动传感器;与所述的振动传感器电连接的直流电源;与所述的振动传感器电连接的报警单元;在人体肌肉静止状态下,所述的振动传感器处于正常连通状态,此时报警单元不工作;在人体肌肉处于振动状态下,所述的振动传感器感知到肌肉振动,产生周期性断路,所述的报警单元感知所述断路,发出报警。
一种穿戴式下肢外骨骼助行机器人.pdf
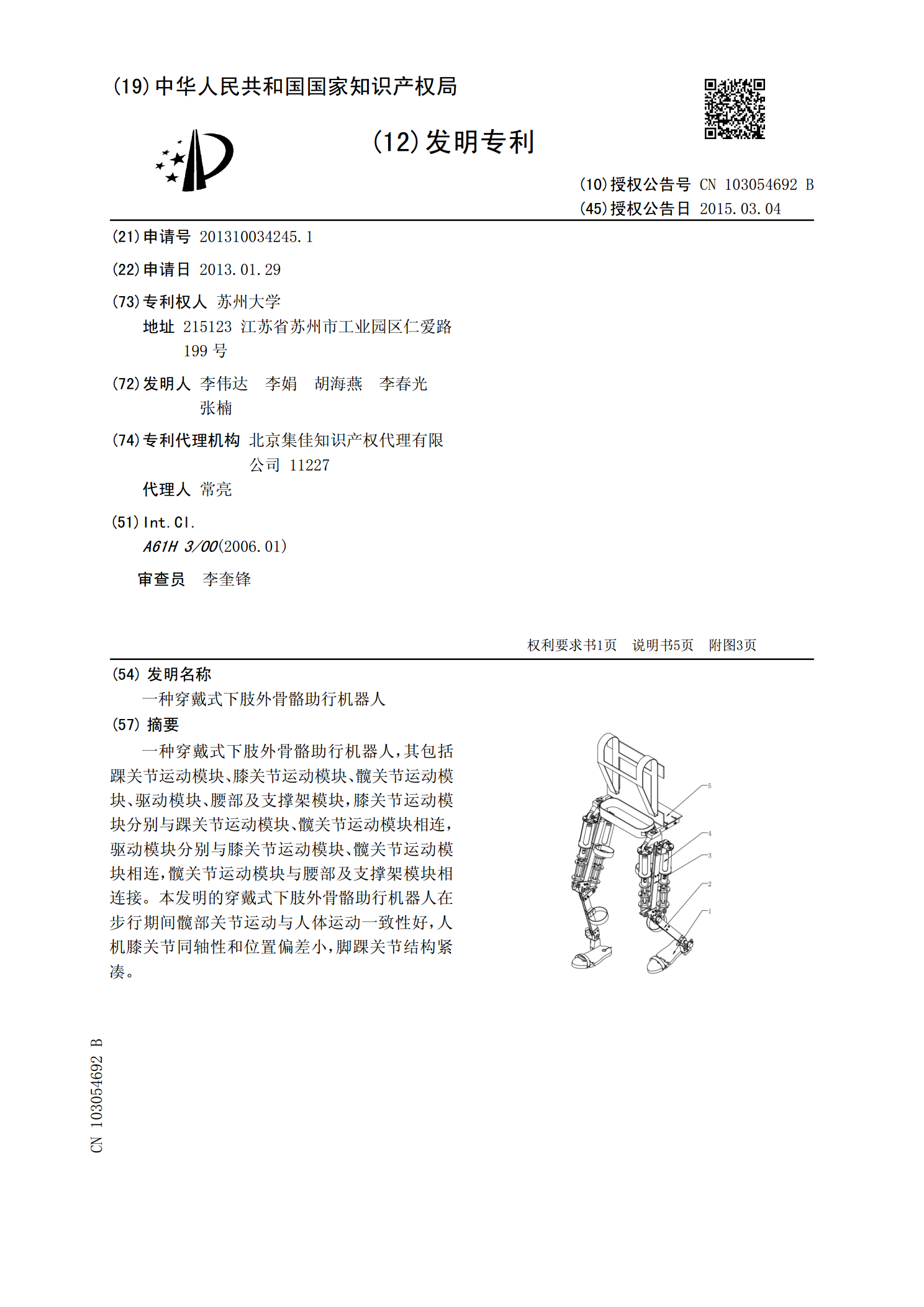
一种穿戴式下肢外骨骼助行机器人,其包括踝关节运动模块、膝关节运动模块、髋关节运动模块、驱动模块、腰部及支撑架模块,膝关节运动模块分别与踝关节运动模块、髋关节运动模块相连,驱动模块分别与膝关节运动模块、髋关节运动模块相连,髋关节运动模块与腰部及支撑架模块相连接。本发明的穿戴式下肢外骨骼助行机器人在步行期间髋部关节运动与人体运动一致性好,人机膝关节同轴性和位置偏差小,脚踝关节结构紧凑。
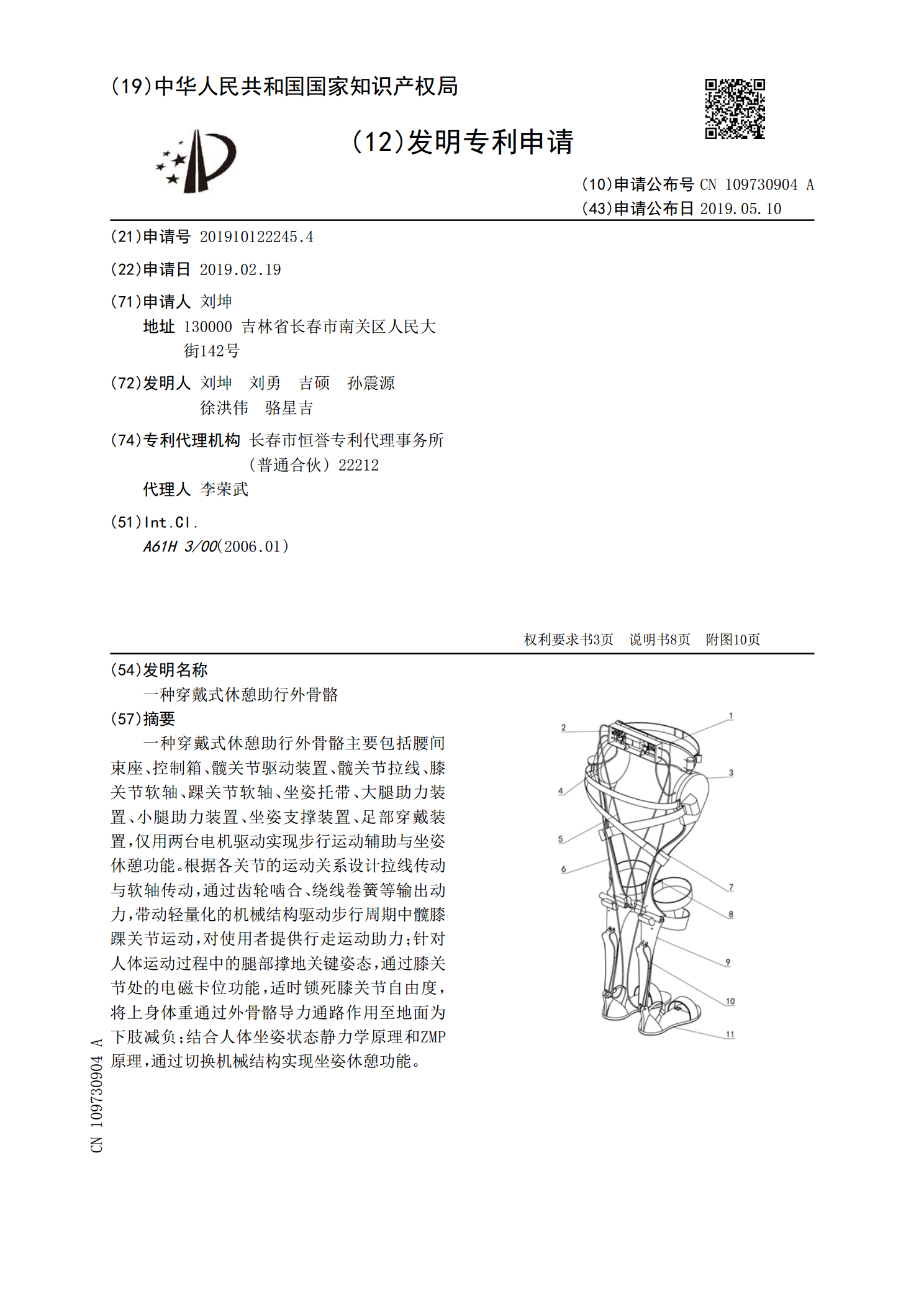
一种穿戴式休憩助行外骨骼.pdf
一种穿戴式休憩助行外骨骼主要包括腰间束座、控制箱、髋关节驱动装置、髋关节拉线、膝关节软轴、踝关节软轴、坐姿托带、大腿助力装置、小腿助力装置、坐姿支撑装置、足部穿戴装置,仅用两台电机驱动实现步行运动辅助与坐姿休憩功能。根据各关节的运动关系设计拉线传动与软轴传动,通过齿轮啮合、绕线卷簧等输出动力,带动轻量化的机械结构驱动步行周期中髋膝踝关节运动,对使用者提供行走运动助力;针对人体运动过程中的腿部撑地关键姿态,通过膝关节处的电磁卡位功能,适时锁死膝关节自由度,将上身体重通过外骨骼导力通路作用至地面为下肢减负;结