
基于阵列相机成像的视觉检测方法、设备及系统.pdf

是你****元呀


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于阵列相机成像的视觉检测方法、设备及系统.pdf
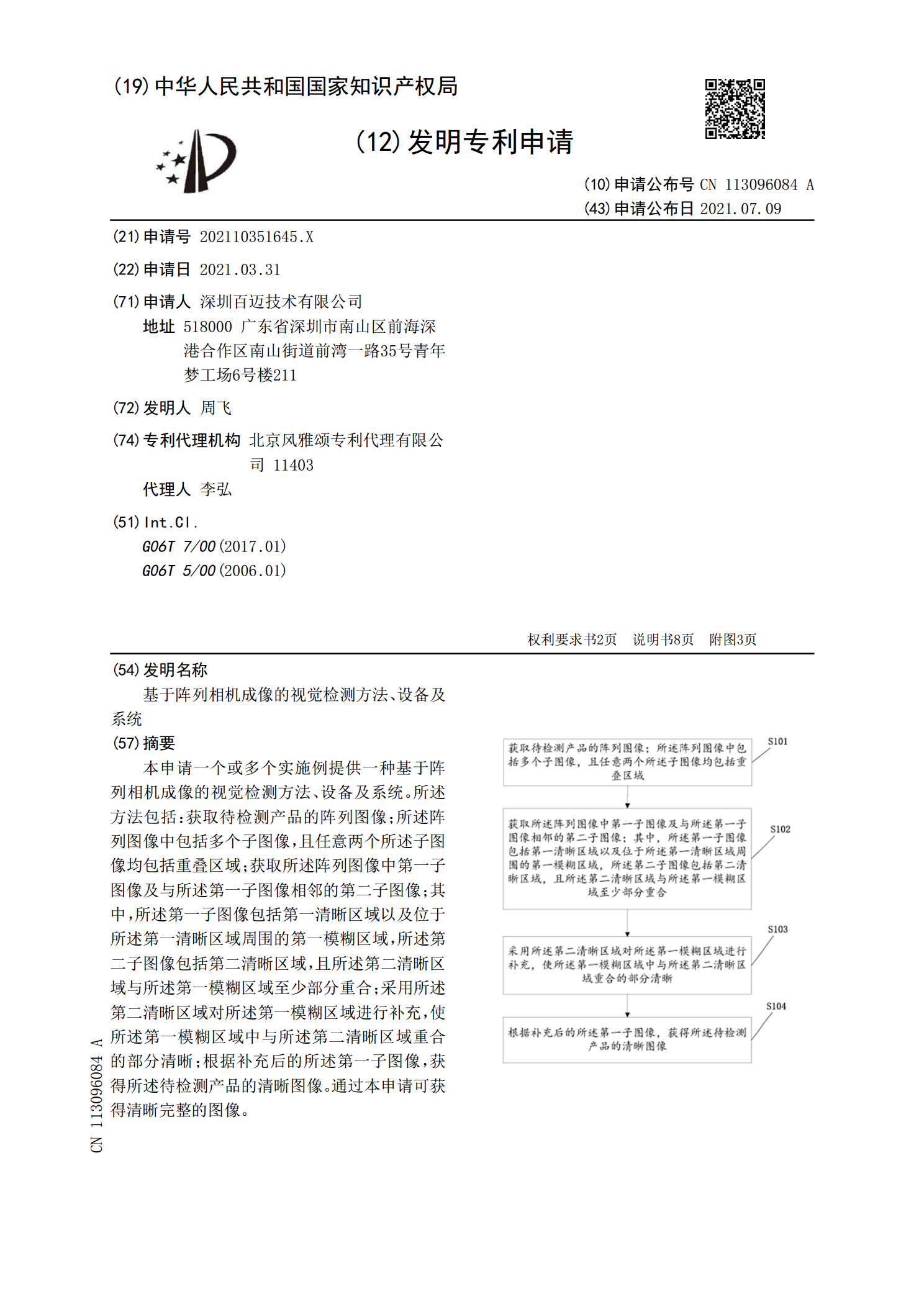
本申请一个或多个实施例提供一种基于阵列相机成像的视觉检测方法、设备及系统。所述方法包括:获取待检测产品的阵列图像;所述阵列图像中包括多个子图像,且任意两个所述子图像均包括重叠区域;获取所述阵列图像中第一子图像及与所述第一子图像相邻的第二子图像;其中,所述第一子图像包括第一清晰区域以及位于所述第一清晰区域周围的第一模糊区域,所述第二子图像包括第二清晰区域,且所述第二清晰区域与所述第一模糊区域至少部分重合;采用所述第二清晰区域对所述第一模糊区域进行补充,使所述第一模糊区域中与所述第二清晰区域重合的部分清晰;根
多阵列相机成像系统及其方法.pdf
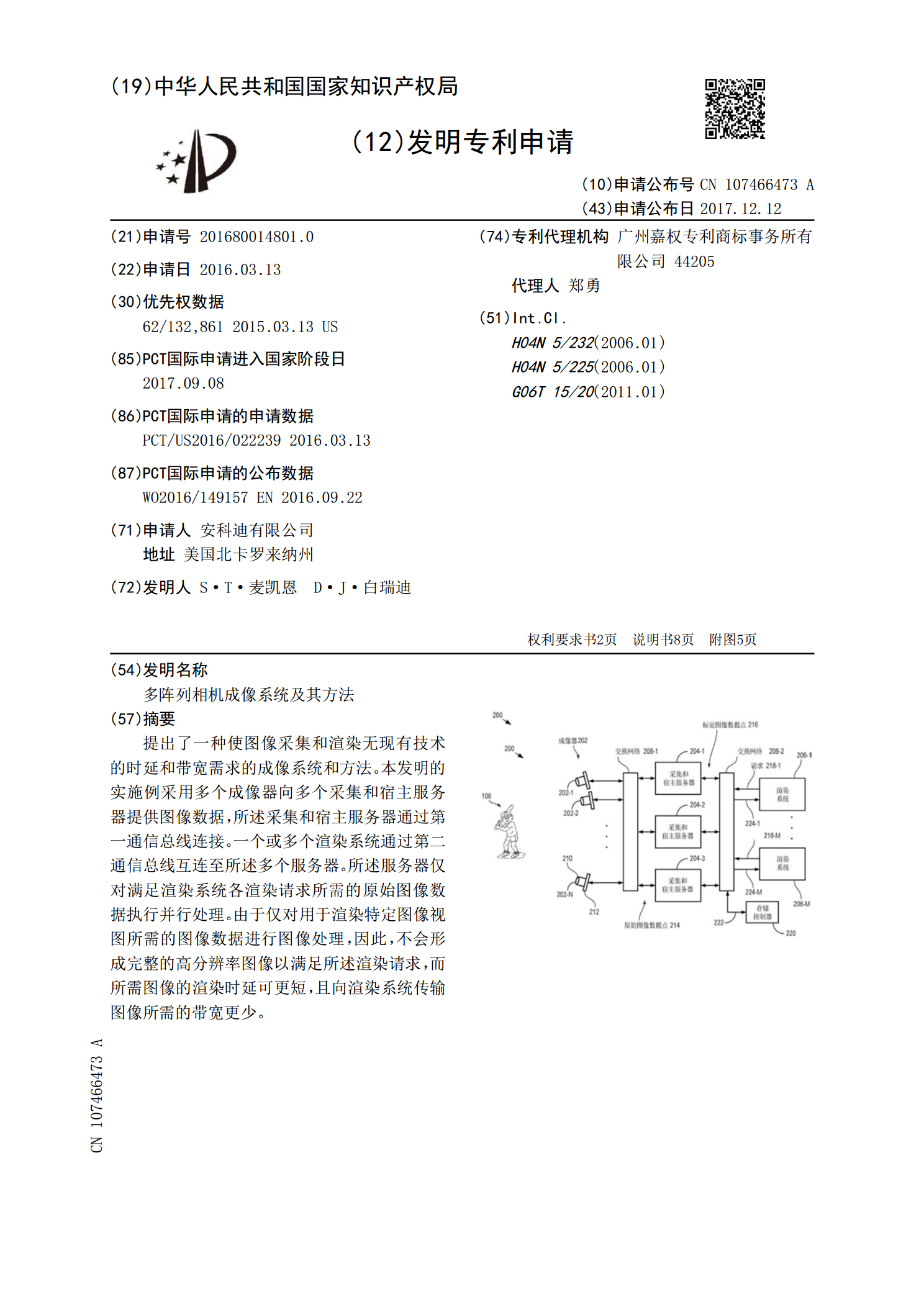
提出了一种使图像采集和渲染无现有技术的时延和带宽需求的成像系统和方法。本发明的实施例采用多个成像器向多个采集和宿主服务器提供图像数据,所述采集和宿主服务器通过第一通信总线连接。一个或多个渲染系统通过第二通信总线互连至所述多个服务器。所述服务器仅对满足渲染系统各渲染请求所需的原始图像数据执行并行处理。由于仅对用于渲染特定图像视图所需的图像数据进行图像处理,因此,不会形成完整的高分辨率图像以满足所述渲染请求,而所需图像的渲染时延可更短,且向渲染系统传输图像所需的带宽更少。

基于相机阵列的红外光场成像.docx
基于相机阵列的红外光场成像基于相机阵列的红外光场成像技术摘要:红外光场成像是一种先进的成像技术,具有广泛的应用潜力。本文介绍了基于相机阵列的红外光场成像技术的原理、方法和最新研究进展。首先,我们介绍了红外光场成像的基本原理和优势,包括高分辨率、大视场和实时性。接着,我们详细介绍了相机阵列的工作原理和结构,以及在红外光场成像中的应用。然后,我们概述了红外光场成像的关键环节,包括预处理、相机阵列校准和光场重构。最后,我们综述了目前在基于相机阵列的红外光场成像领域的最新研究成果,并提出了未来研究的发展方向。关键
基于深度相机的叶片装配视觉引导方法及系统.pdf
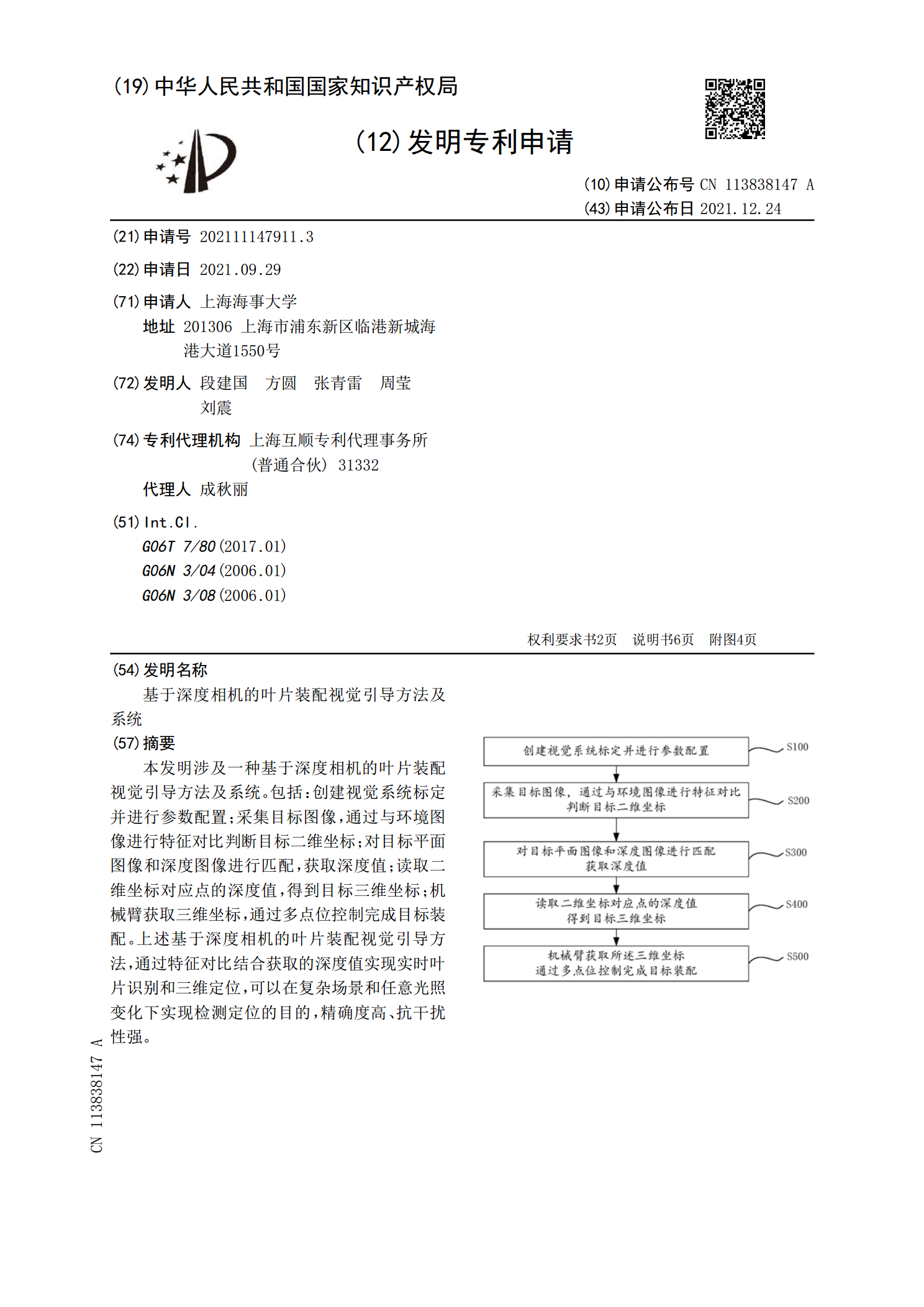
本发明涉及一种基于深度相机的叶片装配视觉引导方法及系统。包括:创建视觉系统标定并进行参数配置;采集目标图像,通过与环境图像进行特征对比判断目标二维坐标;对目标平面图像和深度图像进行匹配,获取深度值;读取二维坐标对应点的深度值,得到目标三维坐标;机械臂获取三维坐标,通过多点位控制完成目标装配。上述基于深度相机的叶片装配视觉引导方法,通过特征对比结合获取的深度值实现实时叶片识别和三维定位,可以在复杂场景和任意光照变化下实现检测定位的目的,精确度高、抗干扰性强。
一种基于旋转双棱镜的虚拟相机阵列三维成像方法及系统.pdf
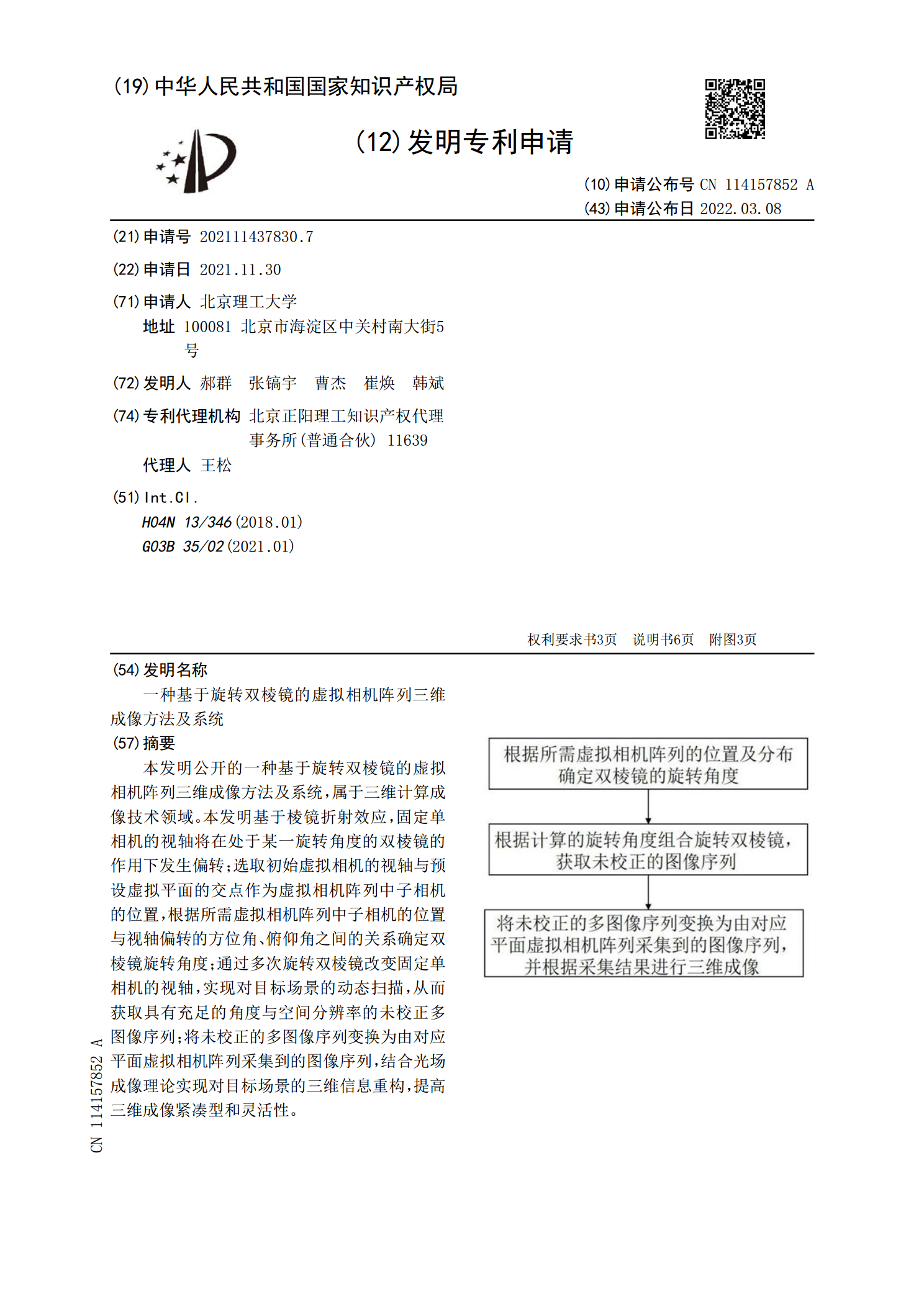
本发明公开的一种基于旋转双棱镜的虚拟相机阵列三维成像方法及系统,属于三维计算成像技术领域。本发明基于棱镜折射效应,固定单相机的视轴将在处于某一旋转角度的双棱镜的作用下发生偏转;选取初始虚拟相机的视轴与预设虚拟平面的交点作为虚拟相机阵列中子相机的位置,根据所需虚拟相机阵列中子相机的位置与视轴偏转的方位角、俯仰角之间的关系确定双棱镜旋转角度;通过多次旋转双棱镜改变固定单相机的视轴,实现对目标场景的动态扫描,从而获取具有充足的角度与空间分辨率的未校正多图像序列;将未校正的多图像序列变换为由对应平面虚拟相机阵列采