
一种内窥镜定位的方法、装置、电子设备和可读存储介质.pdf

是你****馨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种内窥镜定位的方法、装置、电子设备和可读存储介质.pdf
本申请属于医疗器械定位技术领域,公开了一种内窥镜定位的方法、装置、电子设备和可读存储介质,该方法包括:获取内窥镜支撑装置中至少一个连杆的尺寸信息,以及至少一个连杆对应的旋转角度,根据至少一个连杆的尺寸信息,以及至少一个连杆对应的旋转角度,确定内窥镜在第一坐标系中的初始坐标,基于坐标映射矩阵,确定初始坐标在第二坐标系中的映射坐标,根据映射坐标,确定内窥镜的定位结果。这样,可以准确获知内窥镜在目标对象中的定位。

一种定位方法、装置、电子设备和可读存储介质.pdf
本申请提供一种定位方法、装置、电子设备和可读存储介质,其方法应用于电子设备,包括:确定所述电子设备的第一无线接入点,所述第一无线接入点为所述电子设备接收的多个无线接入点中包括位置信息的接入点;基于所述第一无线接入点的位置信息以及所述电子设备当前连接的第二无线接入点,确定所述电子设备的目标位置,其中,所述多个无线接入点包括所述第二无线接入点。本申请可以减少定位误差。

对象的定位方法、装置、电子设备和可读存储介质.pdf
本发明提供一种对象的定位方法、装置、电子设备和可读存储介质,其中,所述方法通过获取待识别对象的原始采集图像,并从原始采集图像中提取出待识别对象对应的轮廓图像;获取轮廓图像中待识别对象的初始识别半径以及轮廓图像的边缘点数据集,边缘点数据集包括多个轮廓边缘点;基于边缘点数据集和初始识别半径,生成待识别对象的目标拟合圆,目标拟合圆用于拟合待识别对象的形状;基于目标拟合圆,确定轮廓图像中待识别对象所处的目标位置,解决了现有技术中无法准确高效地对被遮挡的对象进行识别和定位的技术问题。
定位方法、装置、电子设备及可读存储介质.pdf
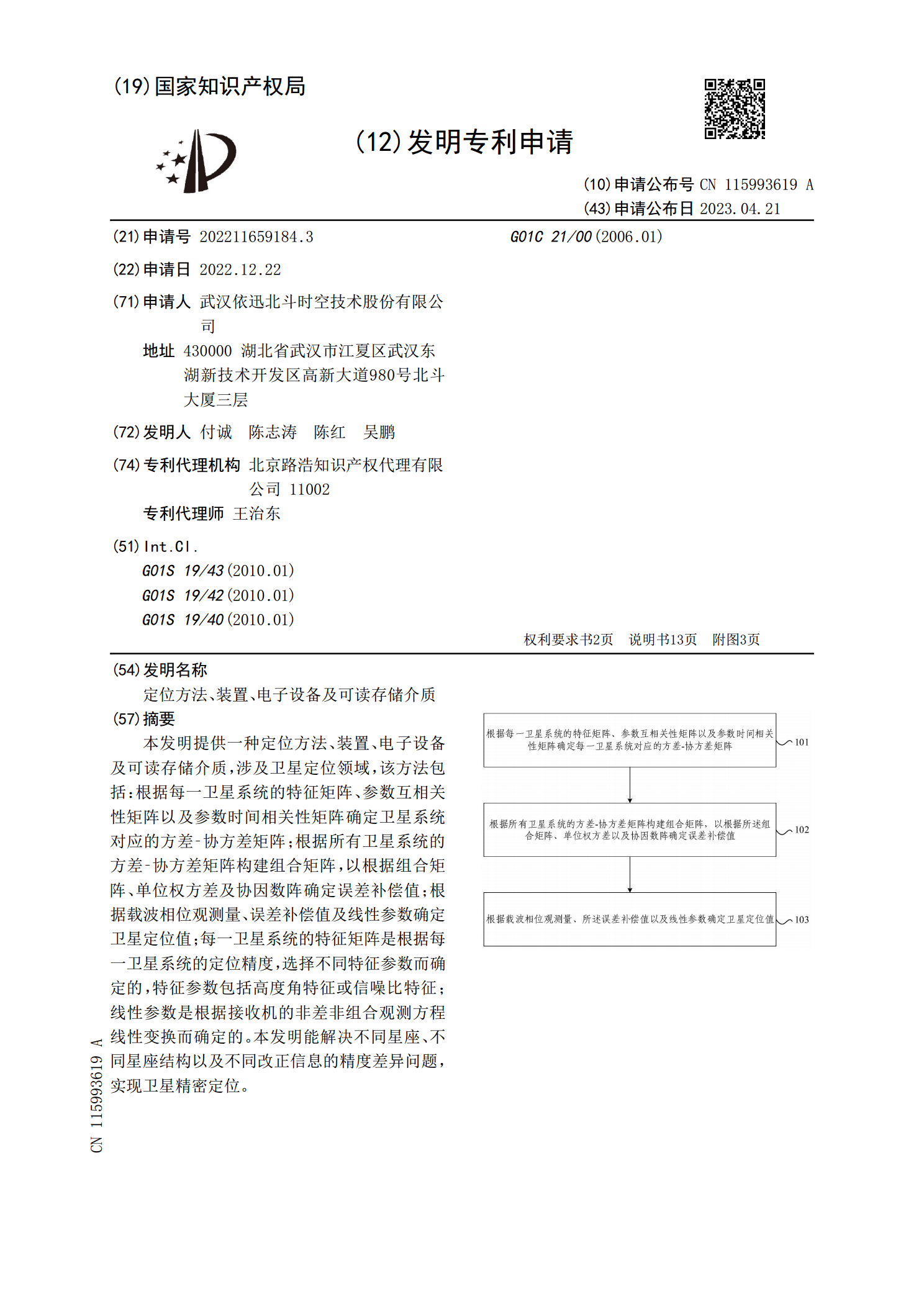
本发明提供一种定位方法、装置、电子设备及可读存储介质,涉及卫星定位领域,该方法包括:根据每一卫星系统的特征矩阵、参数互相关性矩阵以及参数时间相关性矩阵确定卫星系统对应的方差‑协方差矩阵;根据所有卫星系统的方差‑协方差矩阵构建组合矩阵,以根据组合矩阵、单位权方差及协因数阵确定误差补偿值;根据载波相位观测量、误差补偿值及线性参数确定卫星定位值;每一卫星系统的特征矩阵是根据每一卫星系统的定位精度,选择不同特征参数而确定的,特征参数包括高度角特征或信噪比特征;线性参数是根据接收机的非差非组合观测方程线性变换而确定

一种视觉定位方法、装置、电子设备及可读存储介质.pdf
本申请提供一种视觉定位方法、装置、电子设备及可读存储介质,本申请可以从目标图像中提取出多个视觉特征点,并根据从目标图像中检测出的目标灭点,可以确定出目标图像的保留区域和带有预设画面的去除区域,进一步地,将保留区域划分为大小相等的多个网格,并从每个网格包含的视觉特征点中,分别筛选出预设数量的视觉特征点作为可信特征点,通过只在保留区域筛选可信特征点,可以减少用于定位的可信特征点的数量、提高用于定位的可信特征点的可靠性,并且使可信特征点近似均匀分布在保留区域,可以在减少定位时耗的同时,提升视觉定位的成功率,这样