
基于高速铁路运行环境视频自适应去模糊方法及装置.pdf

王秋****哥哥

1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于高速铁路运行环境视频自适应去模糊方法及装置.pdf
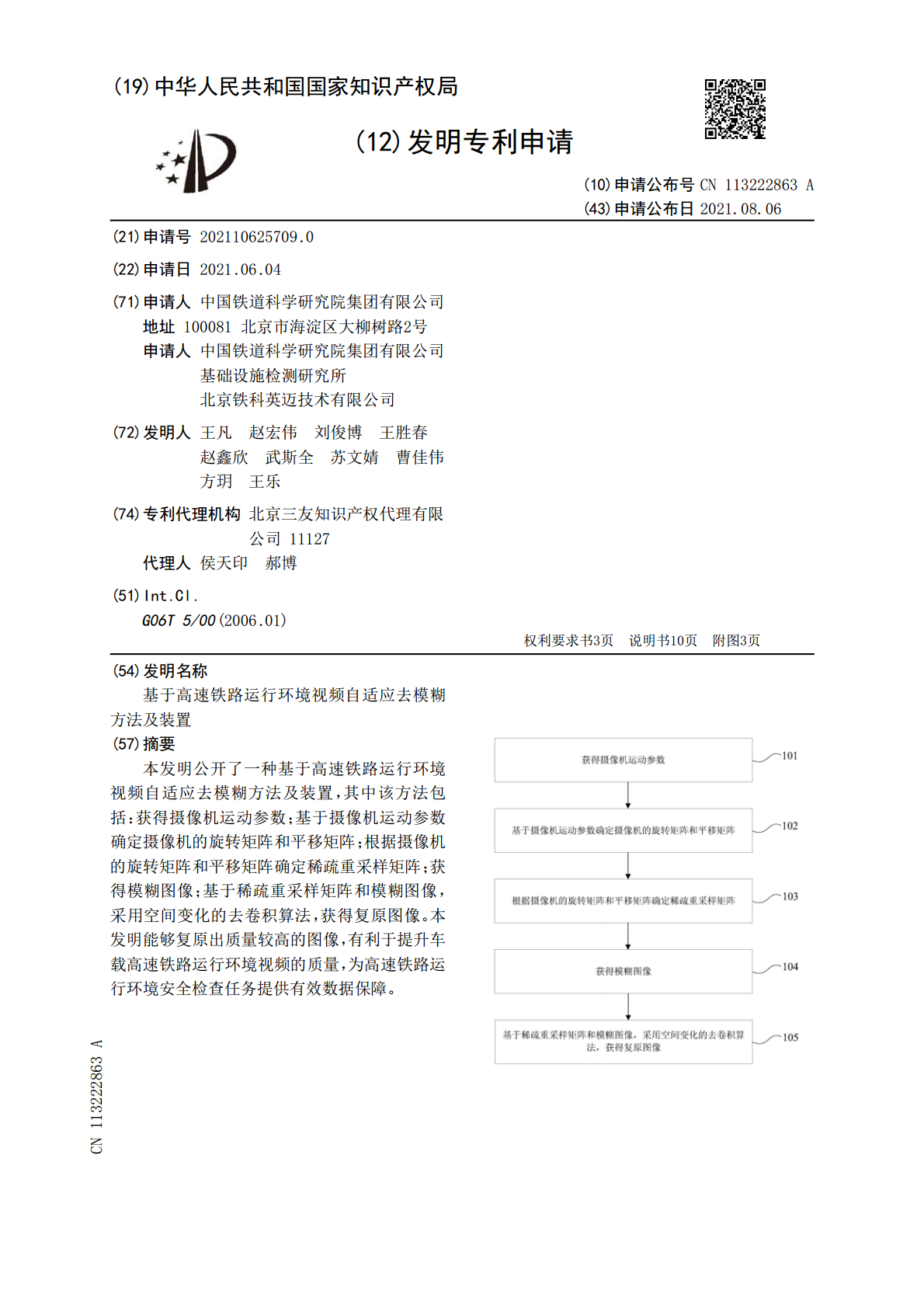
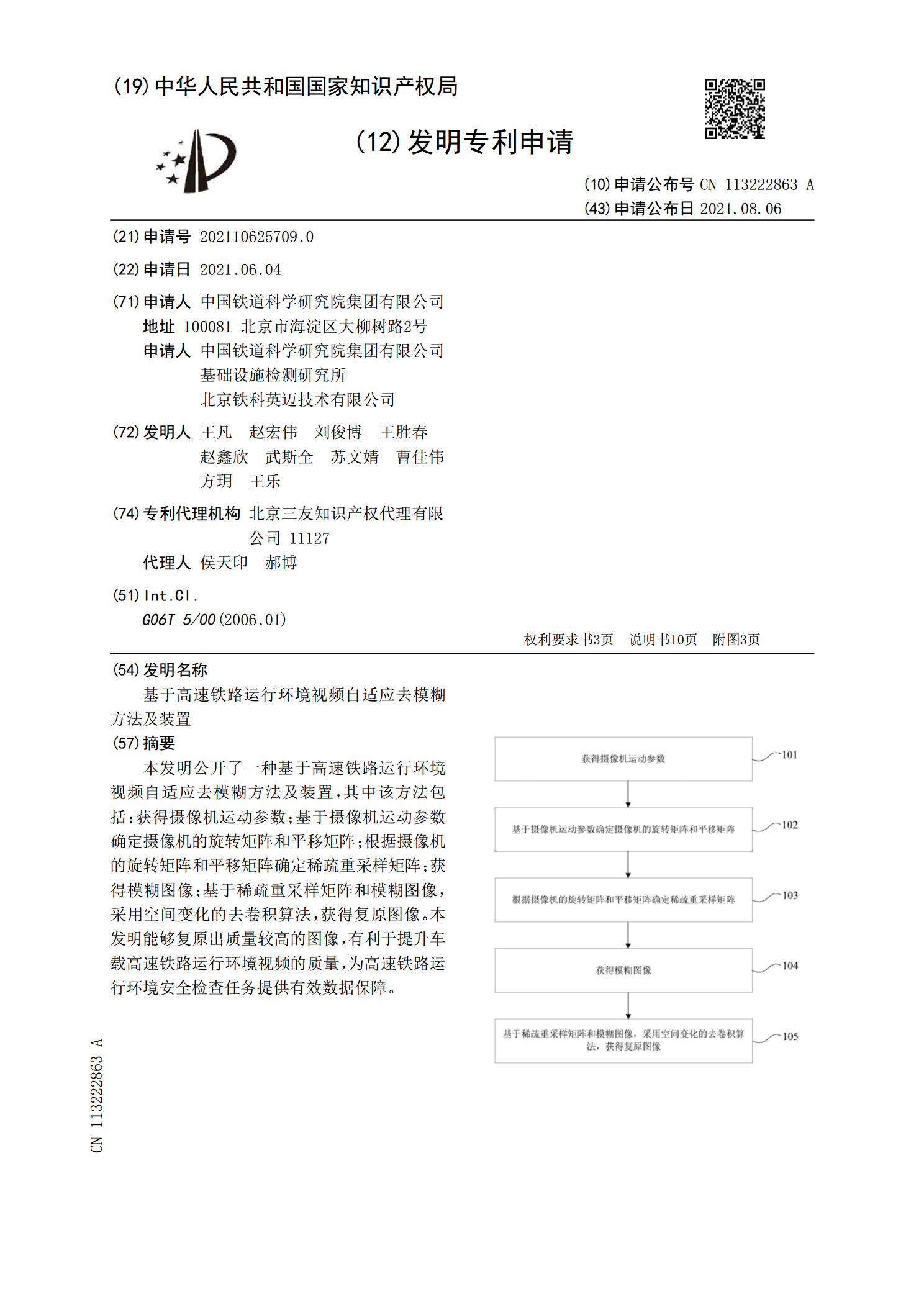
本发明公开了一种基于高速铁路运行环境视频自适应去模糊方法及装置,其中该方法包括:获得摄像机运动参数;基于摄像机运动参数确定摄像机的旋转矩阵和平移矩阵;根据摄像机的旋转矩阵和平移矩阵确定稀疏重采样矩阵;获得模糊图像;基于稀疏重采样矩阵和模糊图像,采用空间变化的去卷积算法,获得复原图像。本发明能够复原出质量较高的图像,有利于提升车载高速铁路运行环境视频的质量,为高速铁路运行环境安全检查任务提供有效数据保障。
基于自适应窗口选择的视频图像去模糊方法.pdf
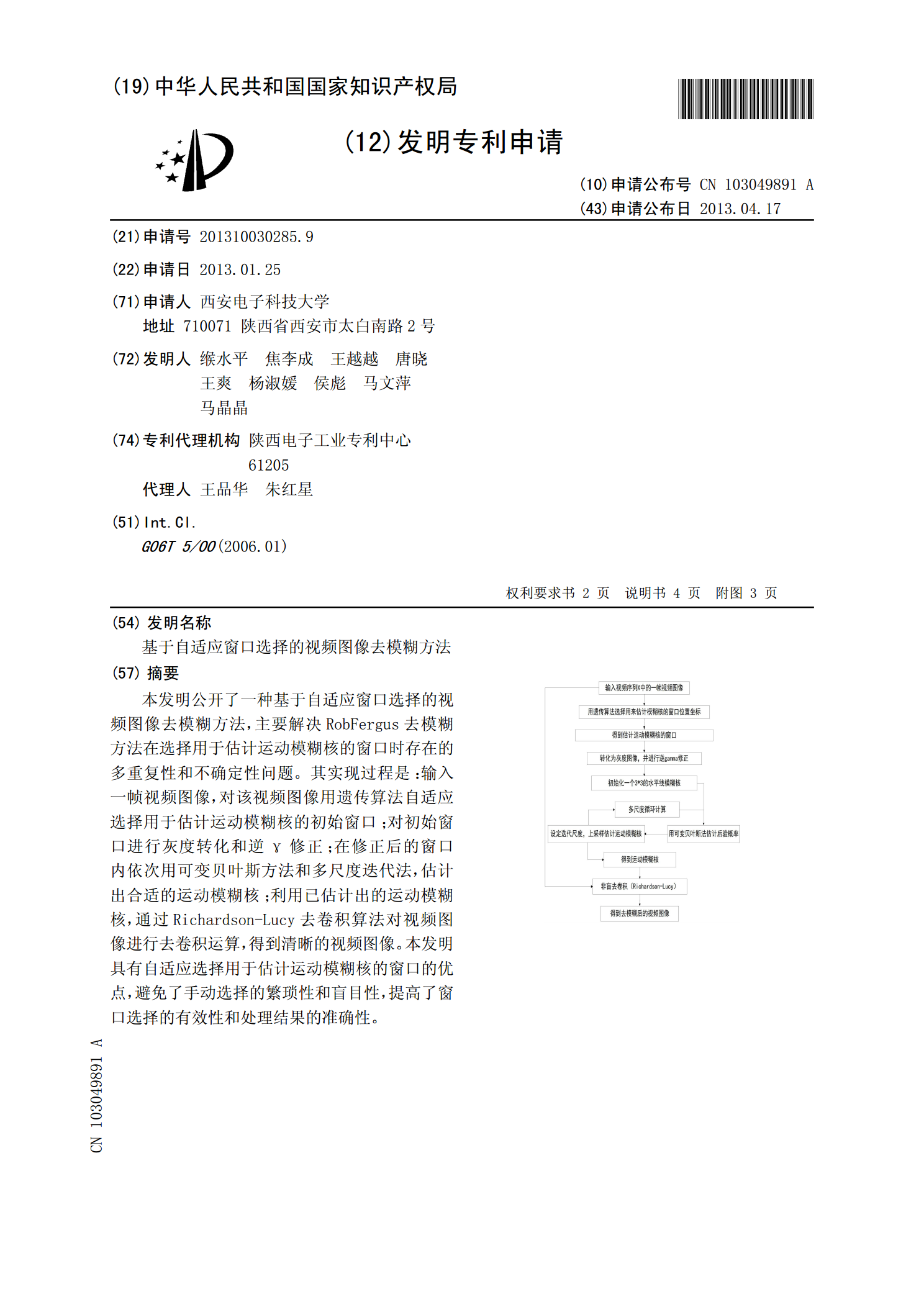
本发明公开了一种基于自适应窗口选择的视频图像去模糊方法,主要解决RobFergus去模糊方法在选择用于估计运动模糊核的窗口时存在的多重复性和不确定性问题。其实现过程是:输入一帧视频图像,对该视频图像用遗传算法自适应选择用于估计运动模糊核的初始窗口;对初始窗口进行灰度转化和逆γ修正;在修正后的窗口内依次用可变贝叶斯方法和多尺度迭代法,估计出合适的运动模糊核;利用已估计出的运动模糊核,通过Richardson-Lucy去卷积算法对视频图像进行去卷积运算,得到清晰的视频图像。本发明具有自适应选择用于估计运动模糊
视频去模糊方法及装置、视频去模糊模型训练方法及装置.pdf
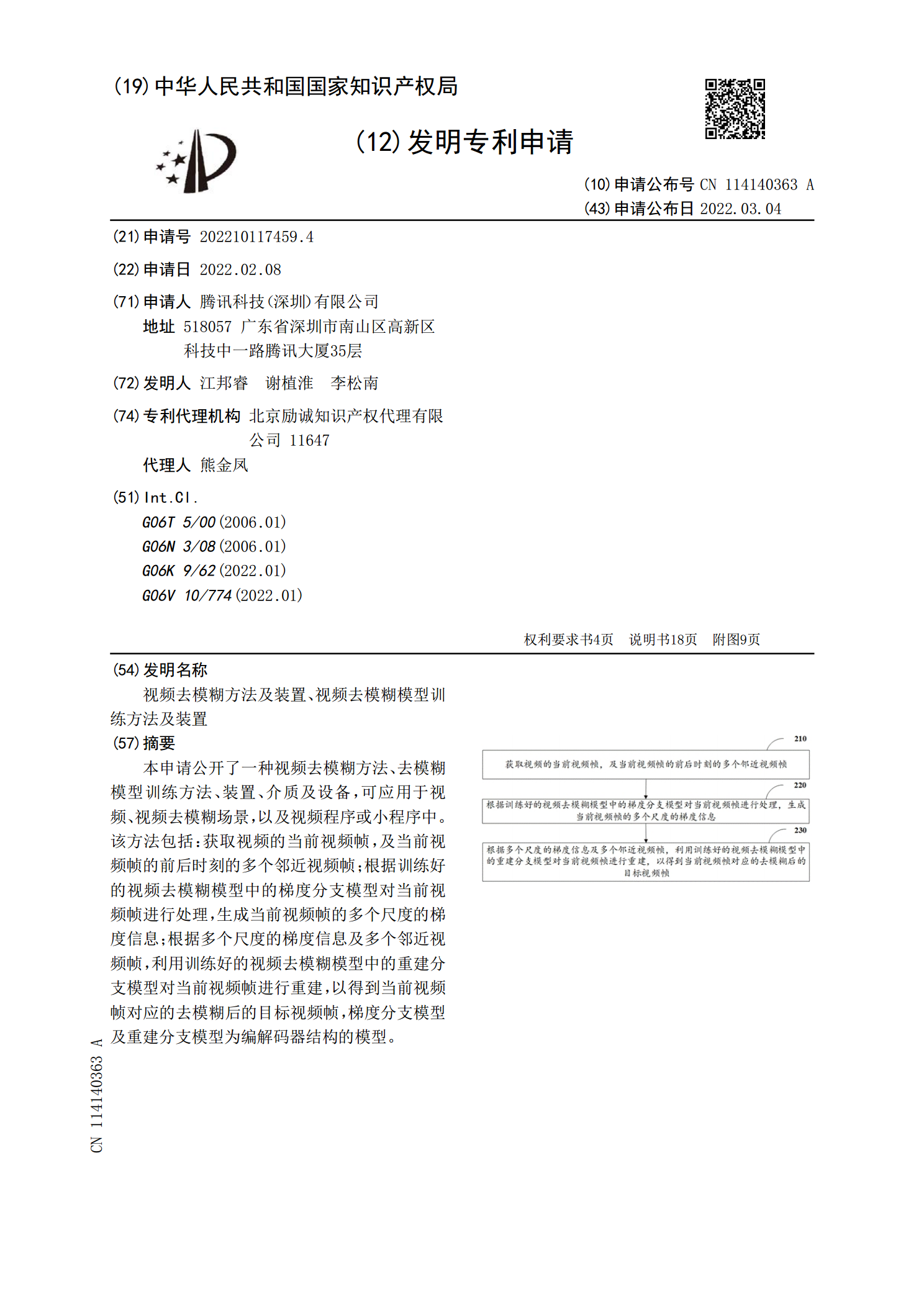
本申请公开了一种视频去模糊方法、去模糊模型训练方法、装置、介质及设备,可应用于视频、视频去模糊场景,以及视频程序或小程序中。该方法包括:获取视频的当前视频帧,及当前视频帧的前后时刻的多个邻近视频帧;根据训练好的视频去模糊模型中的梯度分支模型对当前视频帧进行处理,生成当前视频帧的多个尺度的梯度信息;根据多个尺度的梯度信息及多个邻近视频帧,利用训练好的视频去模糊模型中的重建分支模型对当前视频帧进行重建,以得到当前视频帧对应的去模糊后的目标视频帧,梯度分支模型及重建分支模型为编解码器结构的模型。
一种基于双重曝光先验的视频去模糊方法及装置.pdf
本发明提供一种基于双重曝光先验的视频去模糊方法及装置,其中,该方法包括以下步骤:(A)设计相机的双重曝光模式,获取“长‑短”曝光帧连续交替的视频;(B)对所获取视频中的短曝光帧进行亮度拉伸;(C)设定双重曝光先验项,构建长曝光模糊帧的去模糊总体方程;(D)采用半二次分裂法对长曝光帧去模糊方程进行求解,得到模糊核;(E)采用非盲解卷积算法对长曝光模糊帧进行复原,恢复出去模糊的长曝光帧;(F)循环执行步骤B到E直至所有的长曝光帧处理完成,得到最终去模糊后的清晰视频。该方法可以准确估计出模糊核,最终恢复的视频图
基于补丁匹配与合成的视频去模糊方法.pdf
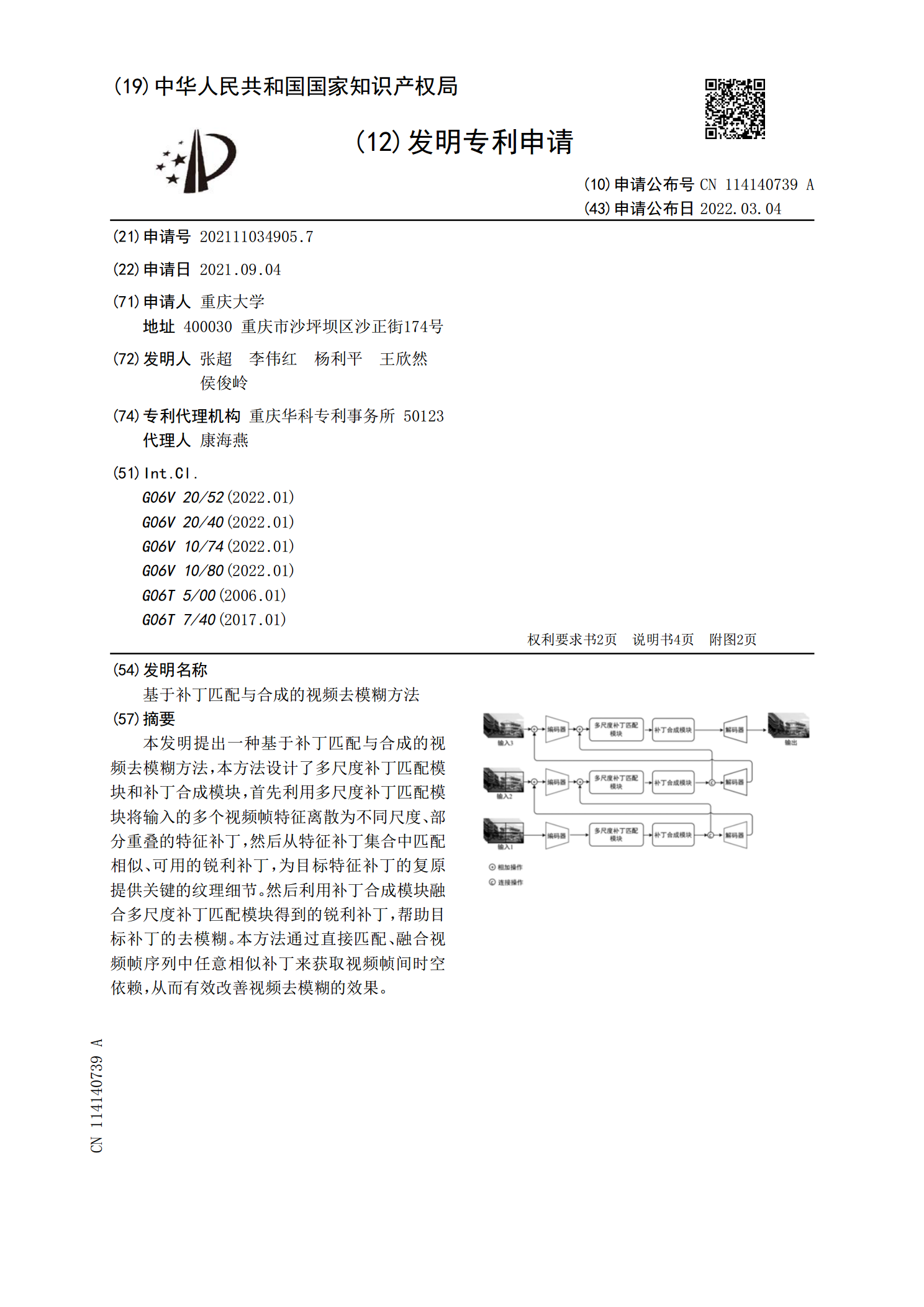
本发明提出一种基于补丁匹配与合成的视频去模糊方法,本方法设计了多尺度补丁匹配模块和补丁合成模块,首先利用多尺度补丁匹配模块将输入的多个视频帧特征离散为不同尺度、部分重叠的特征补丁,然后从特征补丁集合中匹配相似、可用的锐利补丁,为目标特征补丁的复原提供关键的纹理细节。然后利用补丁合成模块融合多尺度补丁匹配模块得到的锐利补丁,帮助目标补丁的去模糊。本方法通过直接匹配、融合视频帧序列中任意相似补丁来获取视频帧间时空依赖,从而有效改善视频去模糊的效果。