
一种误差可控的机器人轨迹同步过渡方法.pdf

文库****坚白


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种误差可控的机器人轨迹同步过渡方法.pdf
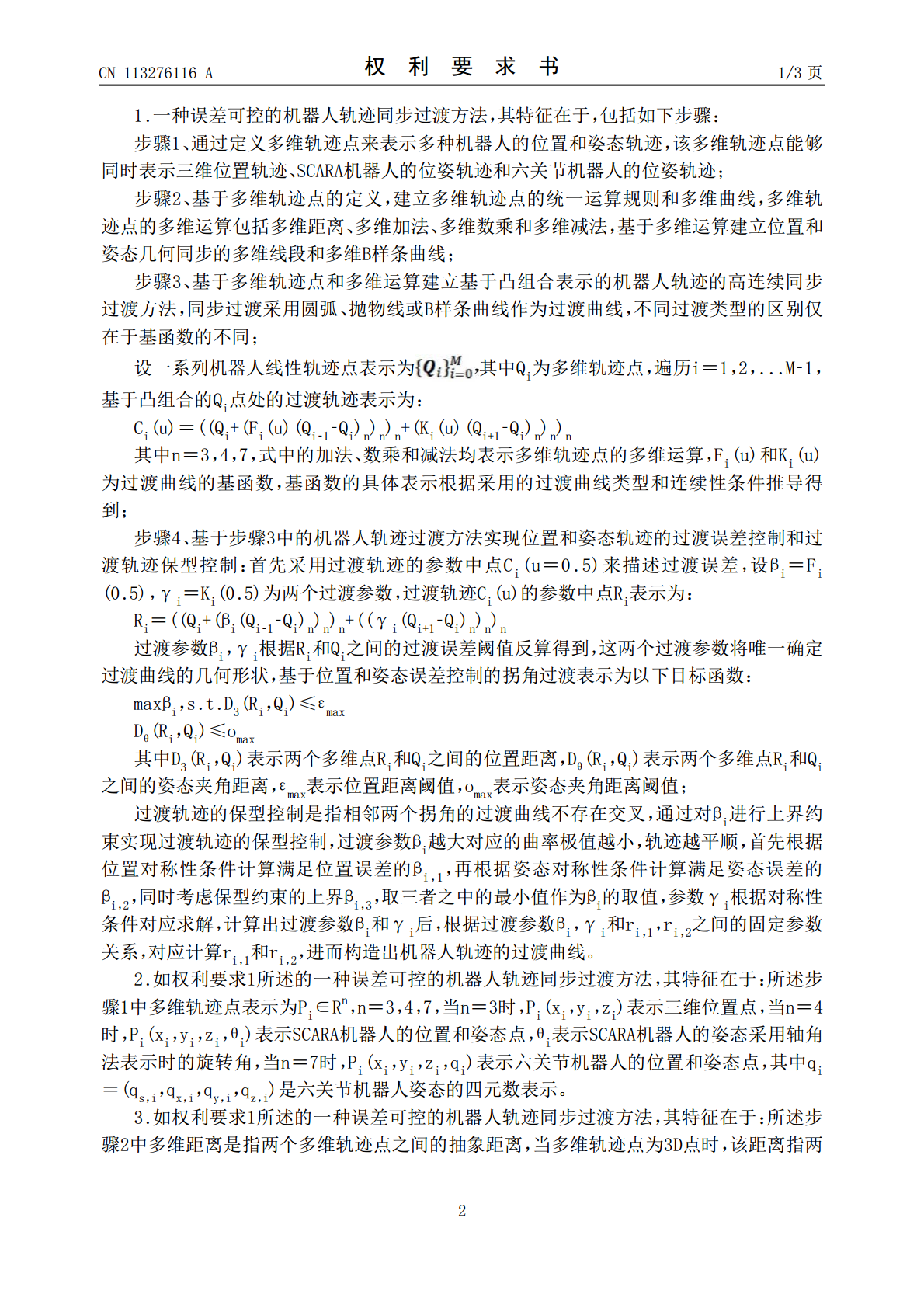
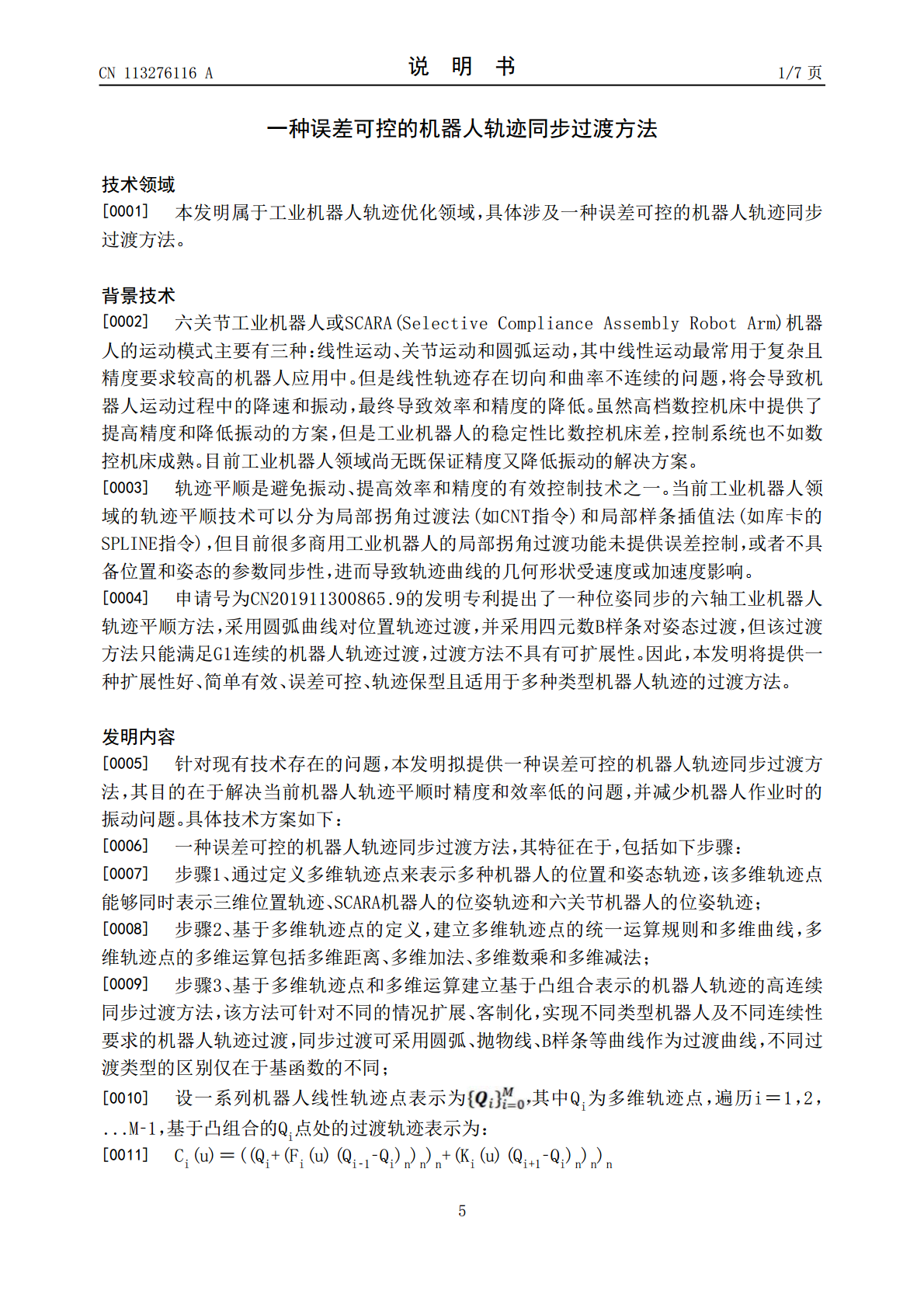
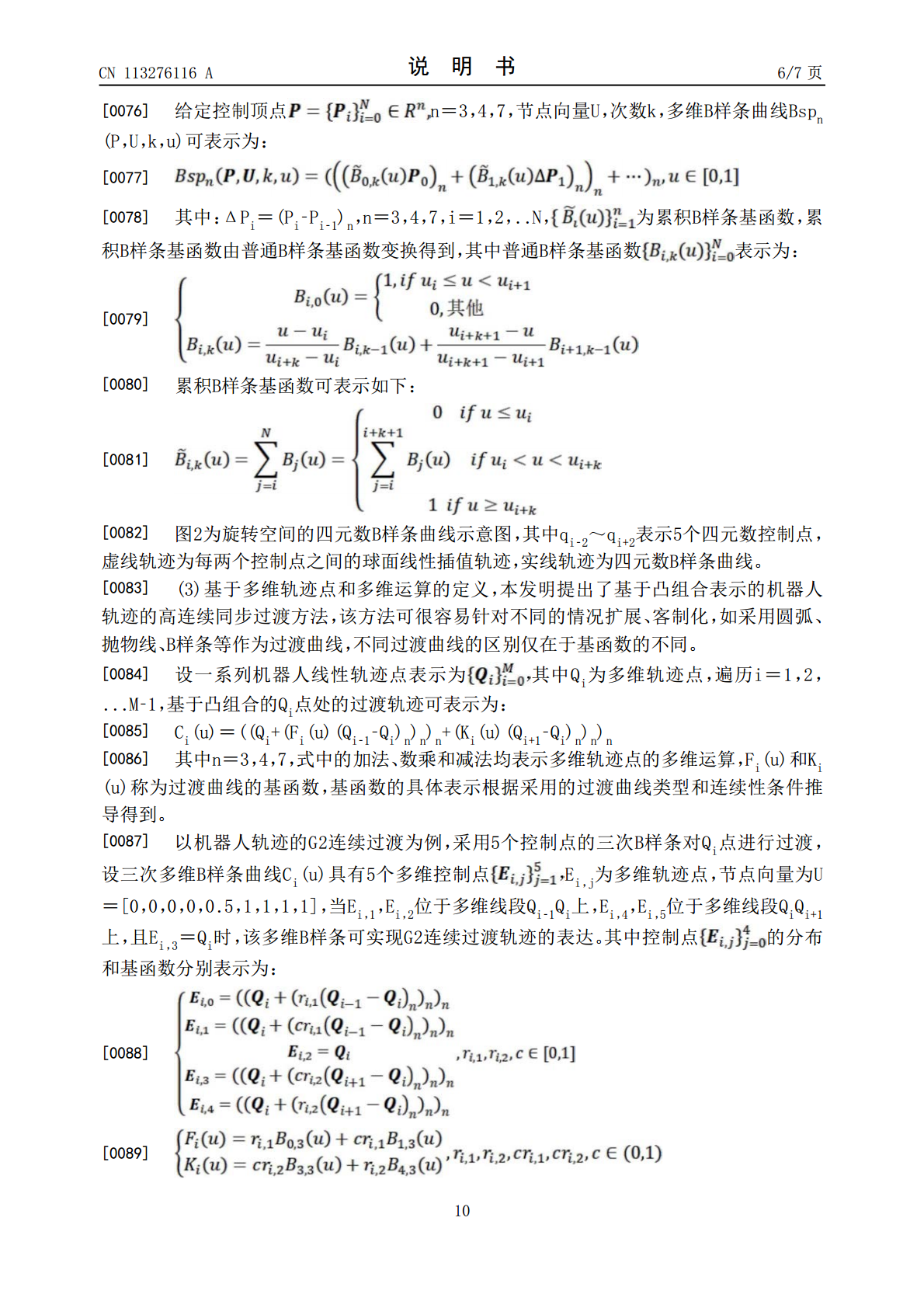
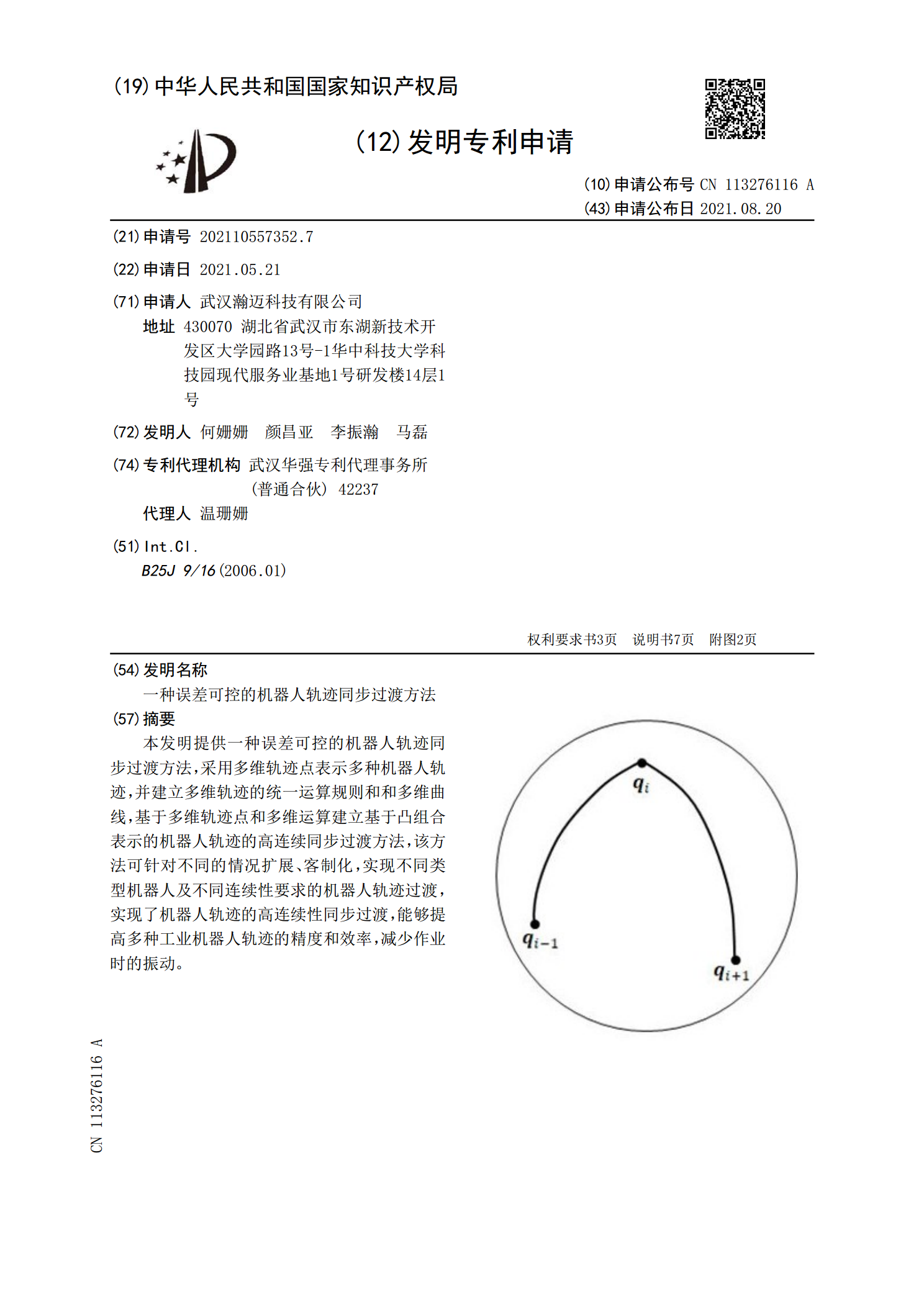
本发明提供一种误差可控的机器人轨迹同步过渡方法,采用多维轨迹点表示多种机器人轨迹,并建立多维轨迹的统一运算规则和和多维曲线,基于多维轨迹点和多维运算建立基于凸组合表示的机器人轨迹的高连续同步过渡方法,该方法可针对不同的情况扩展、客制化,实现不同类型机器人及不同连续性要求的机器人轨迹过渡,实现了机器人轨迹的高连续性同步过渡,能够提高多种工业机器人轨迹的精度和效率,减少作业时的振动。

一种误差可控的机器人轨迹同步优化方法.pdf
本发明提供一种误差可控的机器人轨迹同步优化方法,采用多维轨迹点表示多种机器人轨迹,基于多维轨迹点的定义,建立多维轨迹点的统一运算规则和多维曲线,实现了机器人轨迹的高连续性同步优化,并基于几何迭代法实现了多种类型机器人轨迹的高精度插值,该方法能够提高工业机器人轨迹的精度和工作效率,减少机器人作业时的振动。

一种误差可控的小线段轨迹光顺方法.pdf
一种误差可控的小线段轨迹光顺方法,包括如下步骤:步骤1、机器人轨迹点预处理:对整条轨迹的所有轨迹点进行遍历,根据轨迹点之间的距离和夹角进行分段,将整条轨迹划分为若干段折线段集合;步骤2、轨迹点光顺:遍历步骤1生成的折线段集合,对每一条折线段按照轨迹点误差阈值、弦高误差阈值、连续性要求和光顺要求,计算光顺轨迹。本发明将小线段轨迹光顺生成满足连续性、保形和误差要求的光顺轨迹,提高数控加工或工业机器人应用的工作效率和工作质量;光顺曲线适用于不同连续性和执行效率的需求;与现有过渡方法相比,本发明的光顺曲线能够控制
一种可控轨迹的机器人爬树修枝方法.pdf
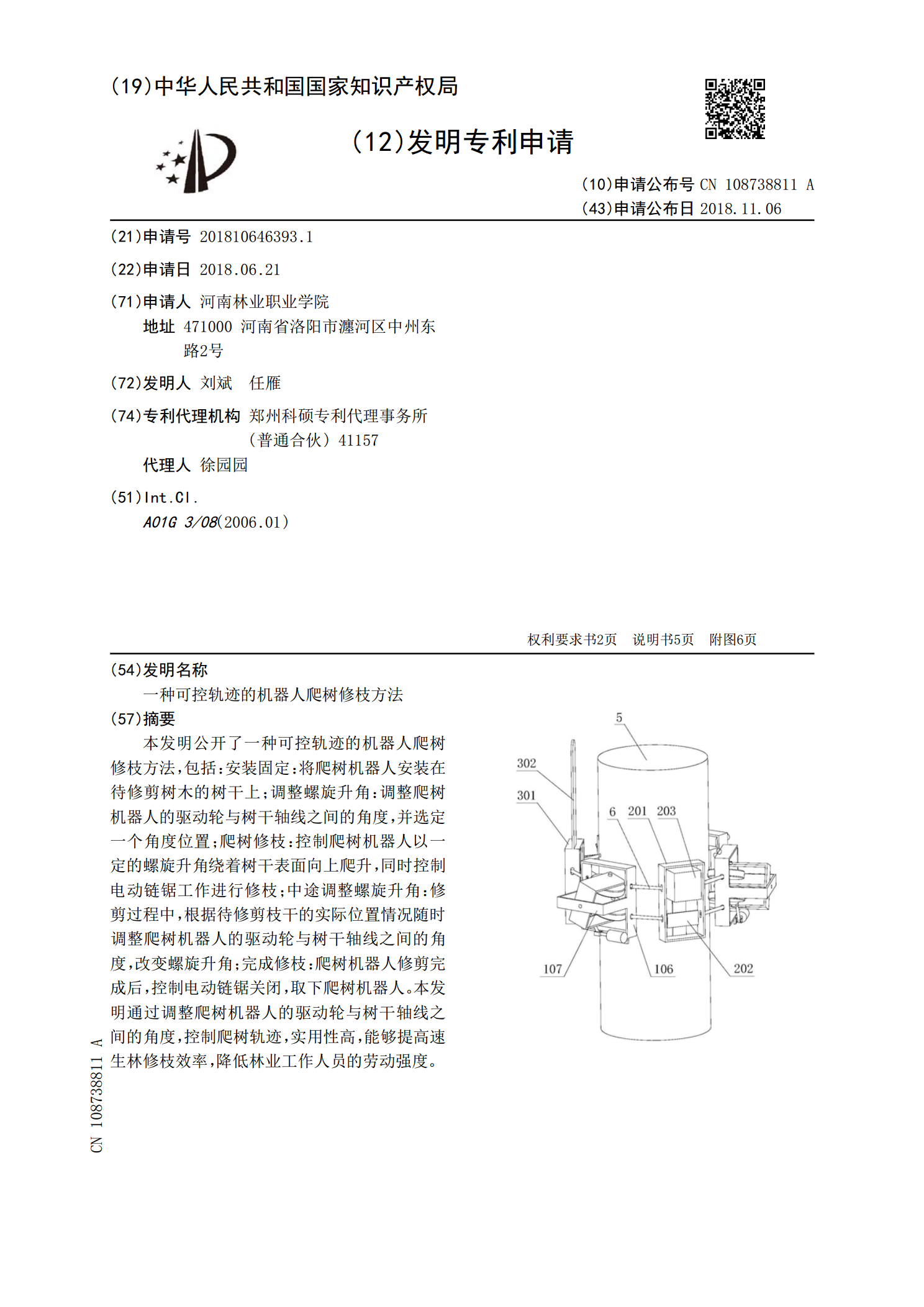
本发明公开了一种可控轨迹的机器人爬树修枝方法,包括:安装固定:将爬树机器人安装在待修剪树木的树干上;调整螺旋升角:调整爬树机器人的驱动轮与树干轴线之间的角度,并选定一个角度位置;爬树修枝:控制爬树机器人以一定的螺旋升角绕着树干表面向上爬升,同时控制电动链锯工作进行修枝;中途调整螺旋升角:修剪过程中,根据待修剪枝干的实际位置情况随时调整爬树机器人的驱动轮与树干轴线之间的角度,改变螺旋升角;完成修枝:爬树机器人修剪完成后,控制电动链锯关闭,取下爬树机器人。本发明通过调整爬树机器人的驱动轮与树干轴线之间的角度,
可控轨迹爬树修枝机器人.pdf
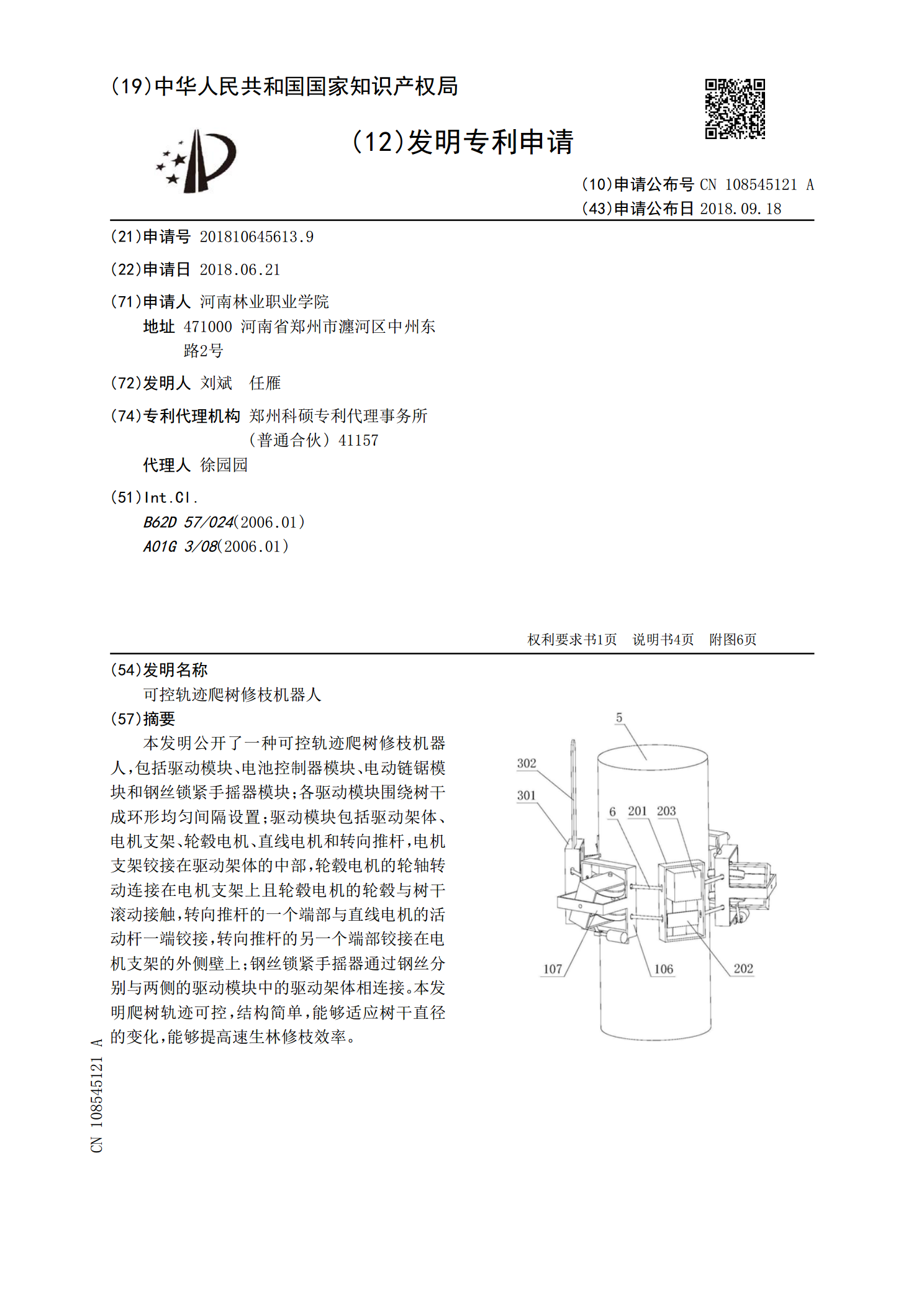
本发明公开了一种可控轨迹爬树修枝机器人,包括驱动模块、电池控制器模块、电动链锯模块和钢丝锁紧手摇器模块;各驱动模块围绕树干成环形均匀间隔设置;驱动模块包括驱动架体、电机支架、轮毂电机、直线电机和转向推杆,电机支架铰接在驱动架体的中部,轮毂电机的轮轴转动连接在电机支架上且轮毂电机的轮毂与树干滚动接触,转向推杆的一个端部与直线电机的活动杆一端铰接,转向推杆的另一个端部铰接在电机支架的外侧壁上;钢丝锁紧手摇器通过钢丝分别与两侧的驱动模块中的驱动架体相连接。本发明爬树轨迹可控,结构简单,能够适应树干直径的变化,能