
可控轨迹爬树修枝机器人.pdf

雨巷****轶丽


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可控轨迹爬树修枝机器人.pdf
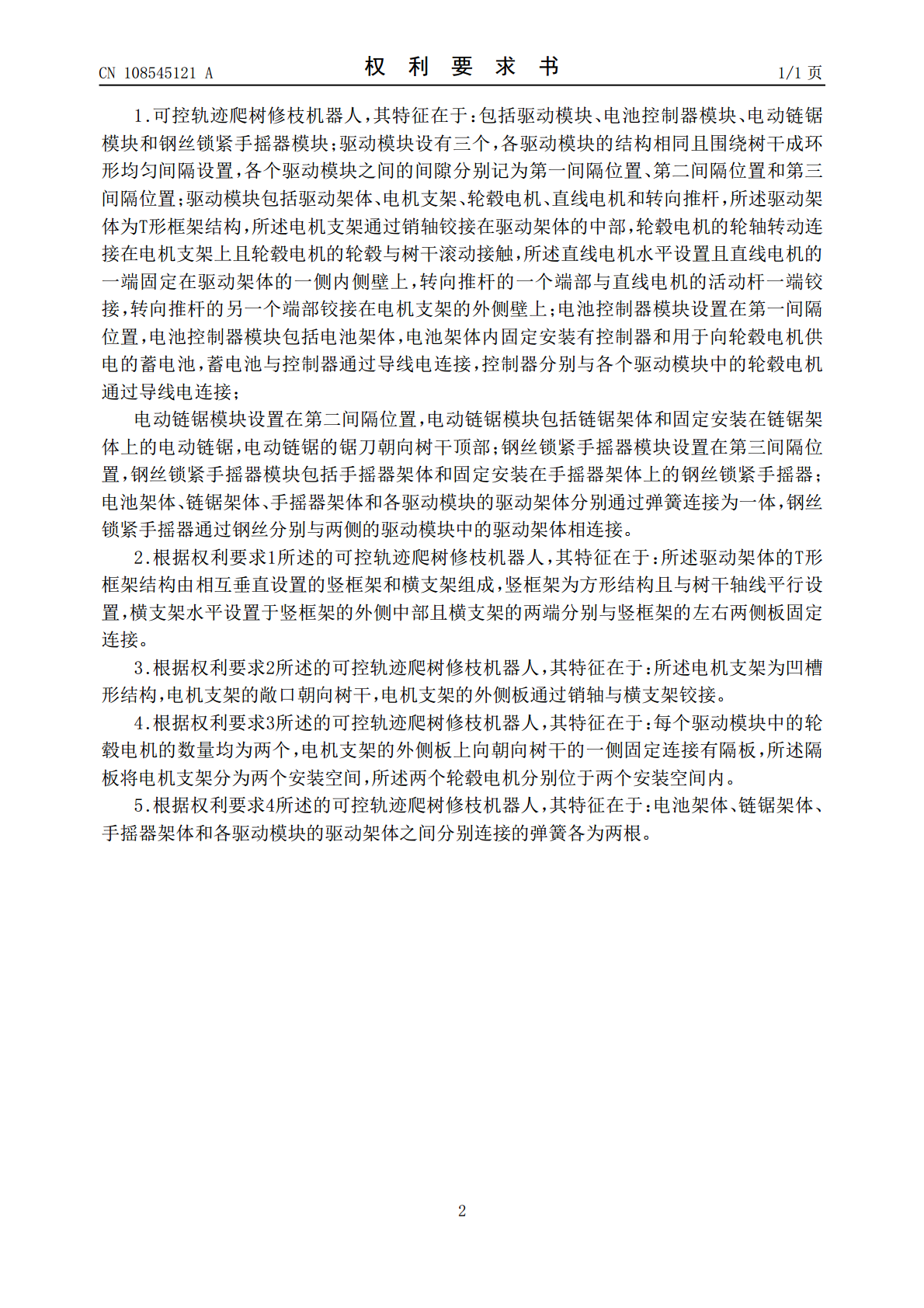
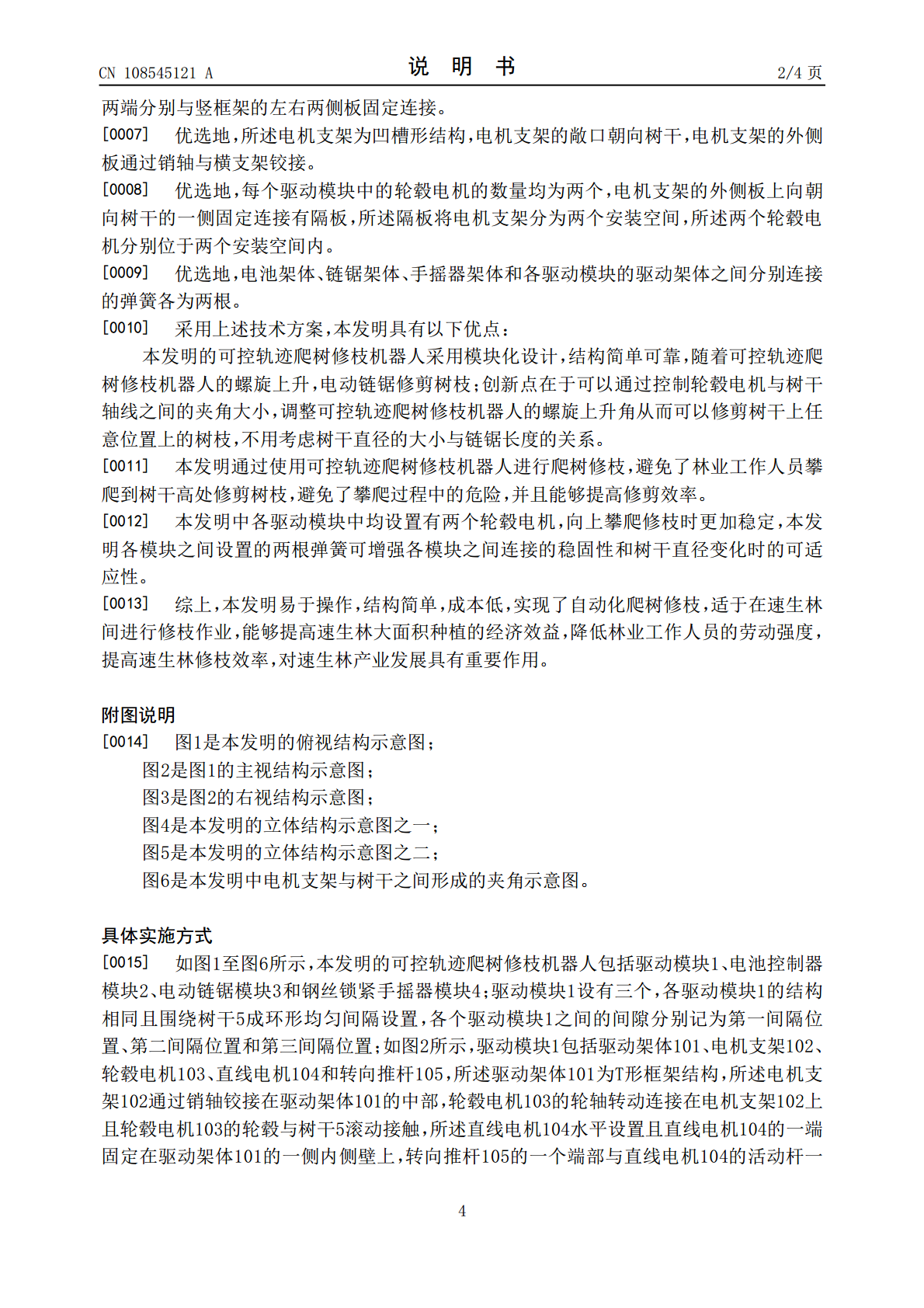
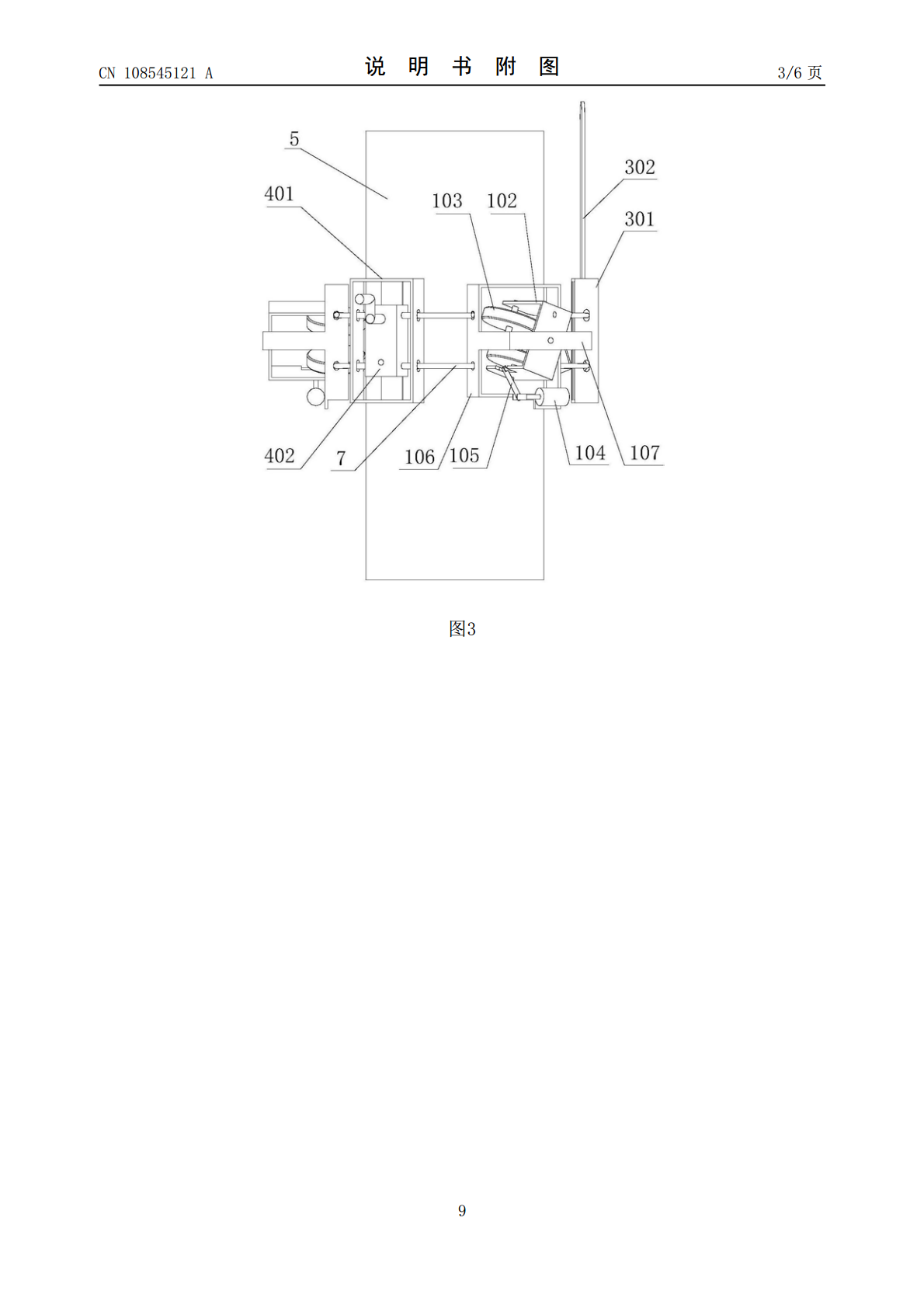
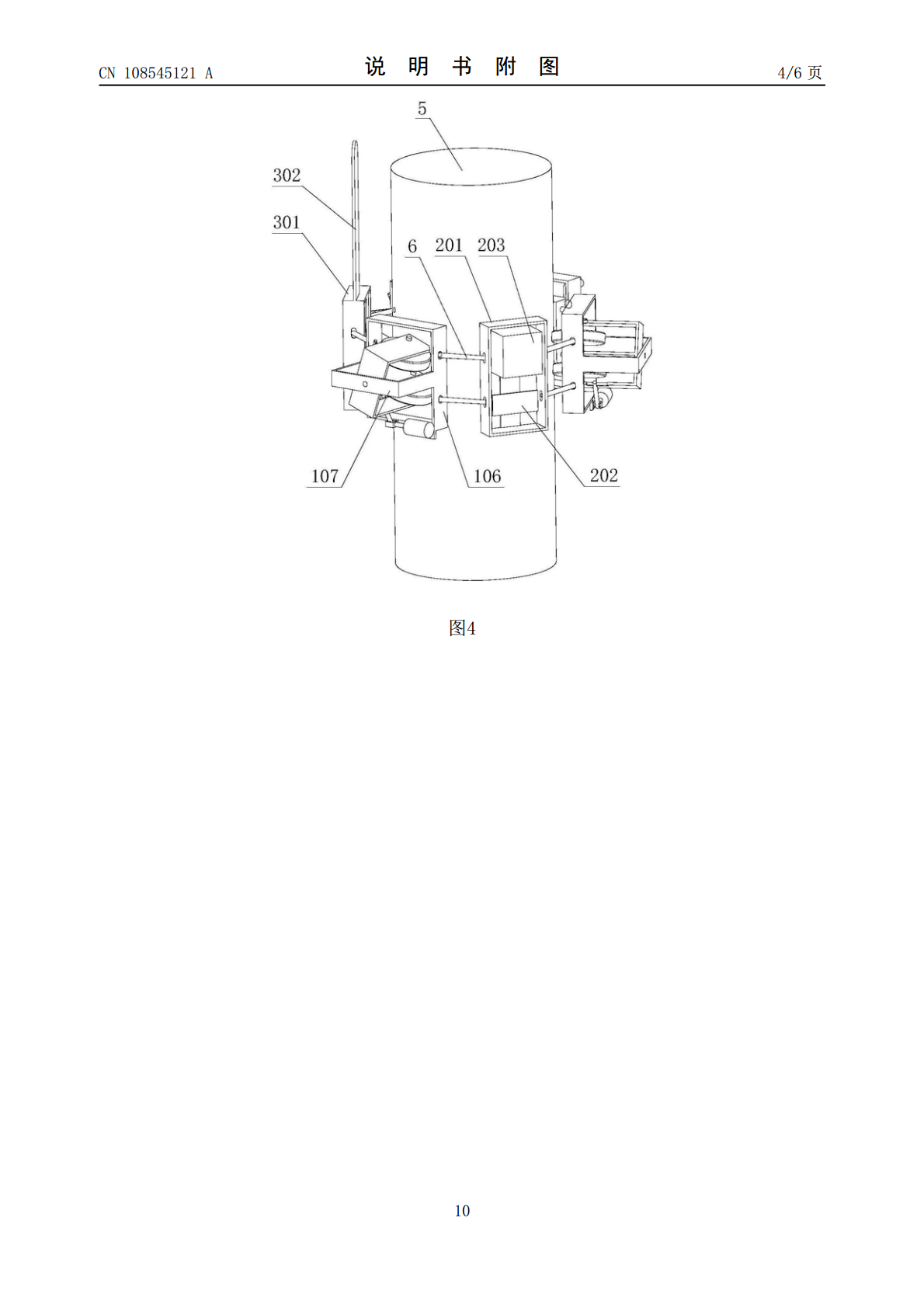
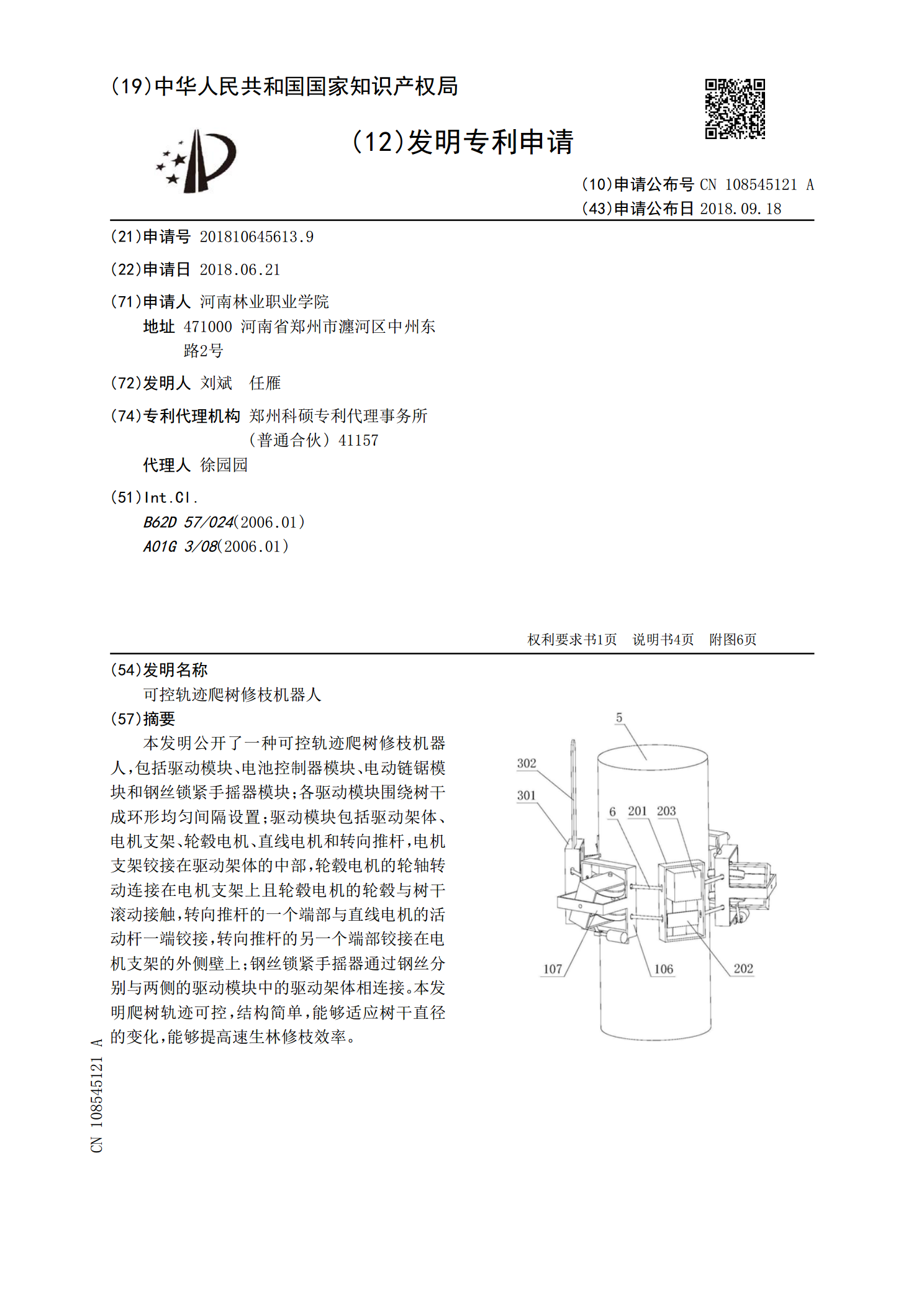
本发明公开了一种可控轨迹爬树修枝机器人,包括驱动模块、电池控制器模块、电动链锯模块和钢丝锁紧手摇器模块;各驱动模块围绕树干成环形均匀间隔设置;驱动模块包括驱动架体、电机支架、轮毂电机、直线电机和转向推杆,电机支架铰接在驱动架体的中部,轮毂电机的轮轴转动连接在电机支架上且轮毂电机的轮毂与树干滚动接触,转向推杆的一个端部与直线电机的活动杆一端铰接,转向推杆的另一个端部铰接在电机支架的外侧壁上;钢丝锁紧手摇器通过钢丝分别与两侧的驱动模块中的驱动架体相连接。本发明爬树轨迹可控,结构简单,能够适应树干直径的变化,能
一种可控轨迹的机器人爬树修枝方法.pdf
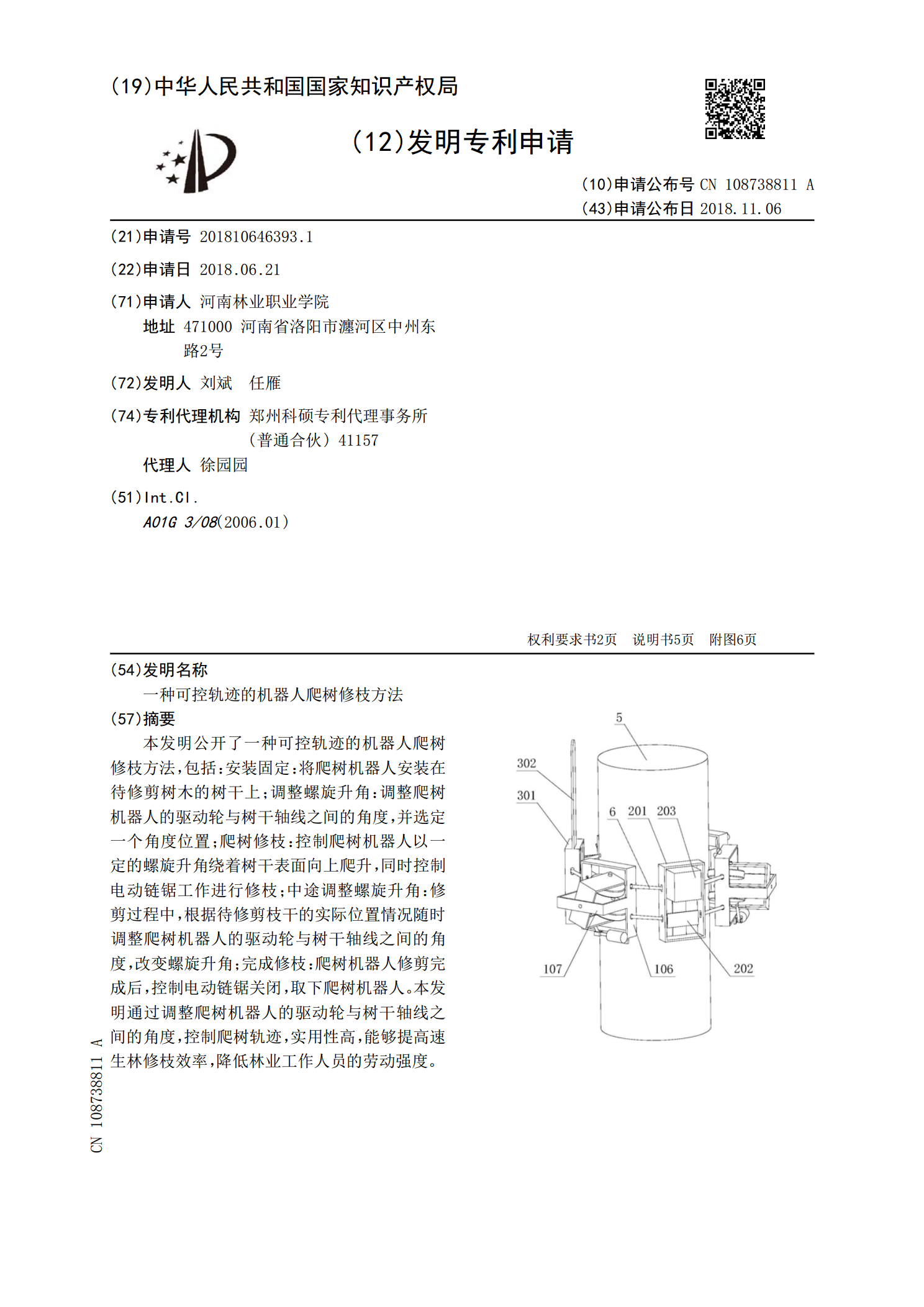
本发明公开了一种可控轨迹的机器人爬树修枝方法,包括:安装固定:将爬树机器人安装在待修剪树木的树干上;调整螺旋升角:调整爬树机器人的驱动轮与树干轴线之间的角度,并选定一个角度位置;爬树修枝:控制爬树机器人以一定的螺旋升角绕着树干表面向上爬升,同时控制电动链锯工作进行修枝;中途调整螺旋升角:修剪过程中,根据待修剪枝干的实际位置情况随时调整爬树机器人的驱动轮与树干轴线之间的角度,改变螺旋升角;完成修枝:爬树机器人修剪完成后,控制电动链锯关闭,取下爬树机器人。本发明通过调整爬树机器人的驱动轮与树干轴线之间的角度,
一种基于柔性刀具的爬树修枝机器人.pdf
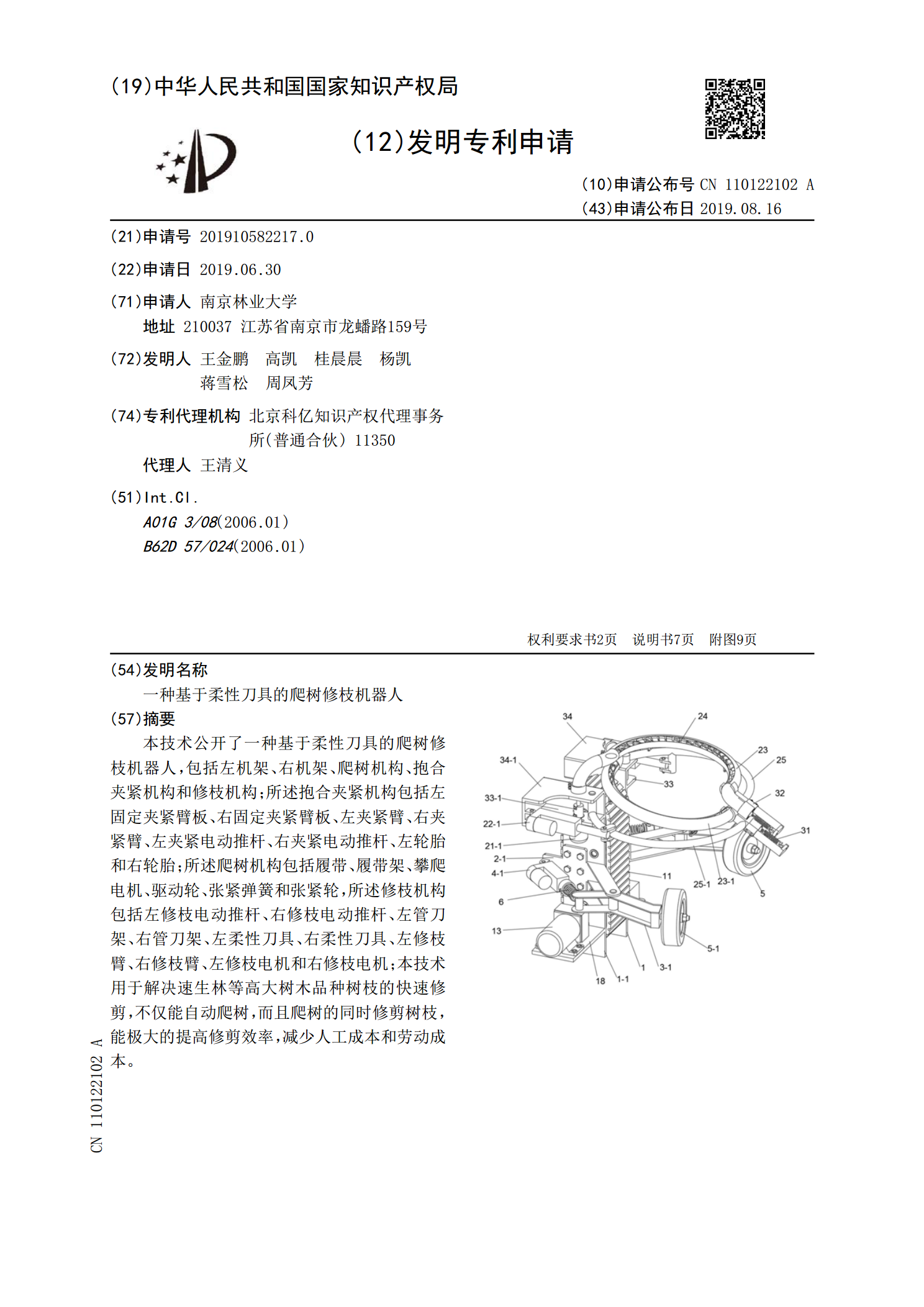
本技术公开了一种基于柔性刀具的爬树修枝机器人,包括左机架、右机架、爬树机构、抱合夹紧机构和修枝机构;所述抱合夹紧机构包括左固定夹紧臂板、右固定夹紧臂板、左夹紧臂、右夹紧臂、左夹紧电动推杆、右夹紧电动推杆、左轮胎和右轮胎;所述爬树机构包括履带、履带架、攀爬电机、驱动轮、张紧弹簧和张紧轮,所述修枝机构包括左修枝电动推杆、右修枝电动推杆、左管刀架、右管刀架、左柔性刀具、右柔性刀具、左修枝臂、右修枝臂、左修枝电机和右修枝电机;本技术用于解决速生林等高大树木品种树枝的快速修剪,不仅能自动爬树,而且爬树的同时修剪树枝
一种高效爬树修枝机.pdf
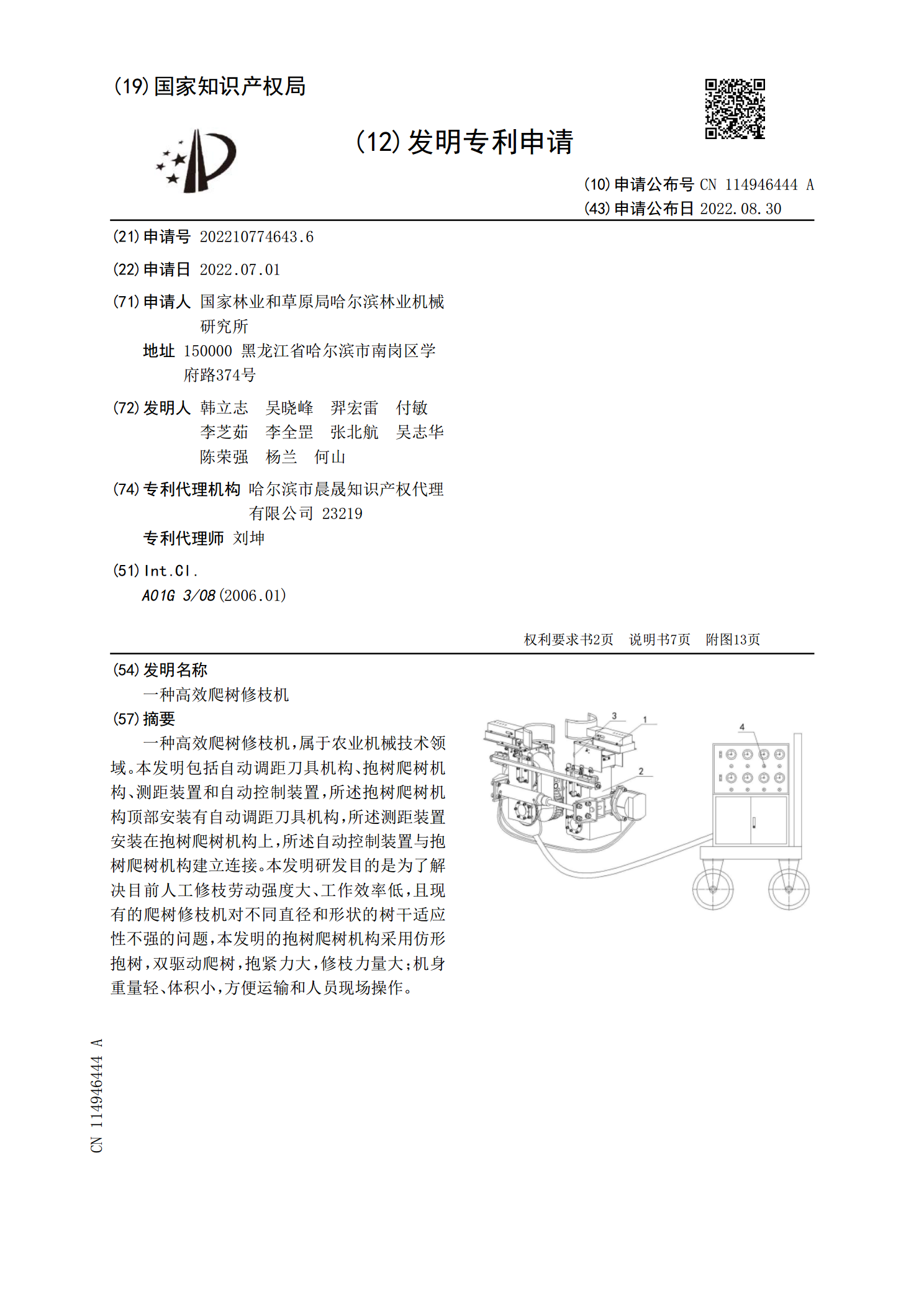
一种高效爬树修枝机,属于农业机械技术领域。本发明包括自动调距刀具机构、抱树爬树机构、测距装置和自动控制装置,所述抱树爬树机构顶部安装有自动调距刀具机构,所述测距装置安装在抱树爬树机构上,所述自动控制装置与抱树爬树机构建立连接。本发明研发目的是为了解决目前人工修枝劳动强度大、工作效率低,且现有的爬树修枝机对不同直径和形状的树干适应性不强的问题,本发明的抱树爬树机构采用仿形抱树,双驱动爬树,抱紧力大,修枝力量大;机身重量轻、体积小,方便运输和人员现场操作。

新型可控变胞式爬树机器人机构的设计与分析的任务书.docx
新型可控变胞式爬树机器人机构的设计与分析的任务书任务书:新型可控变胞式爬树机器人机构的设计与分析一、背景与目的近年来,随着机器人技术的飞速发展,机器人在生产、服务、救援等领域得到广泛应用,包括树木巡查与养护。而在树木巡查中,由于树木生长茂密,传统的人工或半自动化方式很难对树木细节部分进行全面且高效的巡查。因此,设计一种可控变胞式爬树机器人,能快速、准确、全面地巡查树木,对树木的健康状况进行监测,具有重要的应用价值。本文旨在设计一种新型的可控变胞式爬树机器人,研究其机构设计、控制技术与性能优化等关键技术,以