
一种物料输送作业的自动上料控制系统及控制方法.pdf

王秋****哥哥

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种物料输送作业的自动上料控制系统及控制方法.pdf
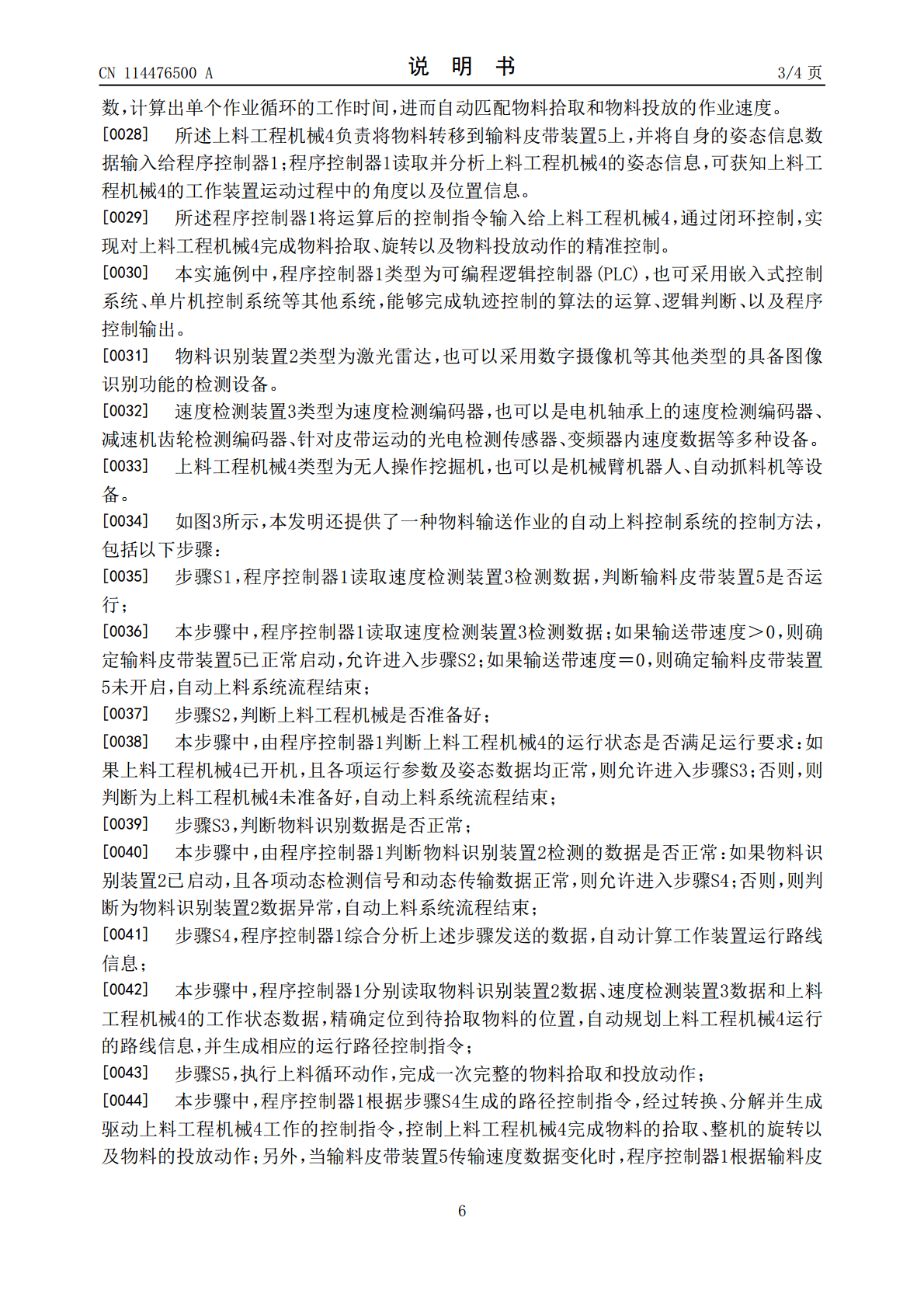
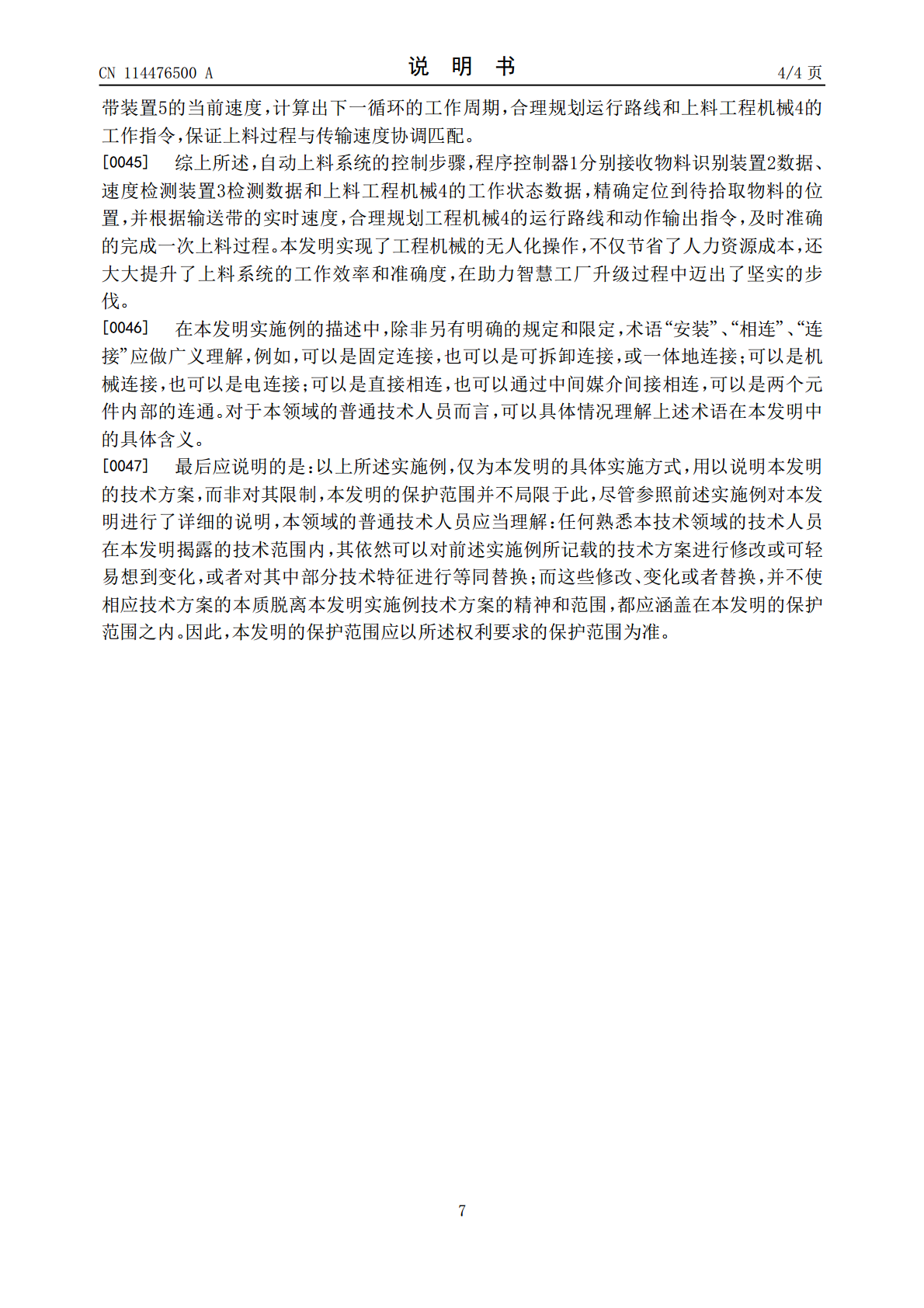
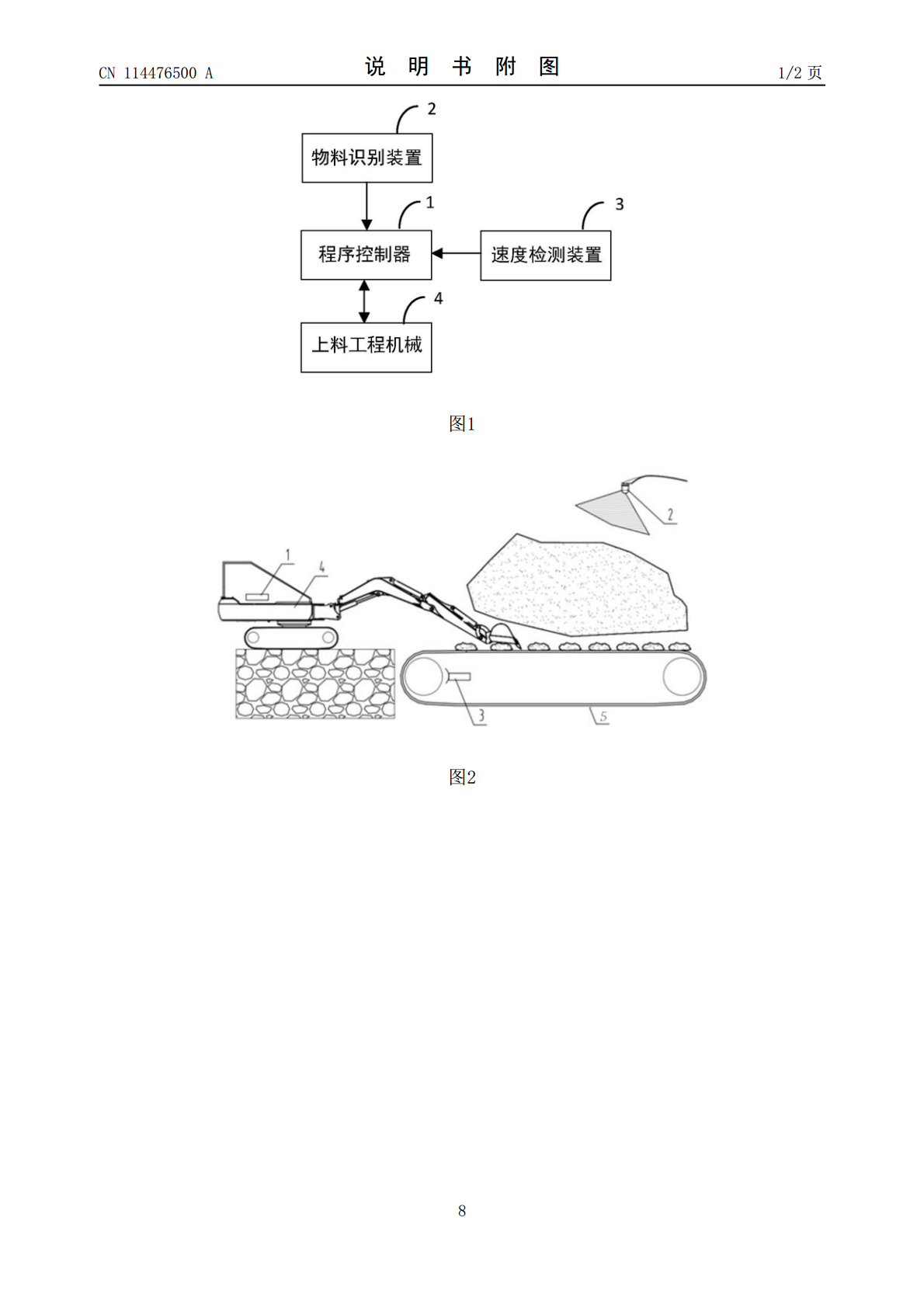
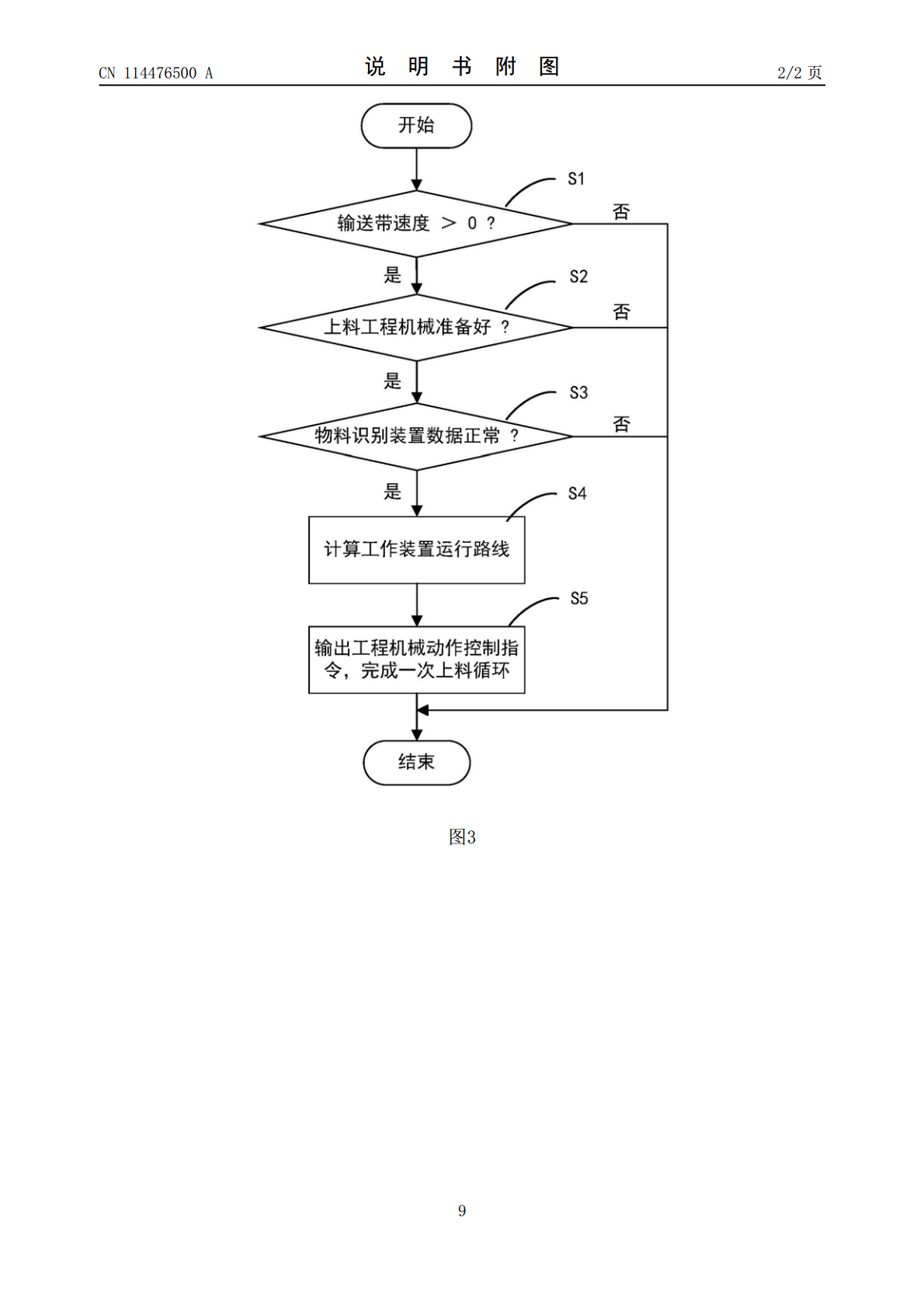
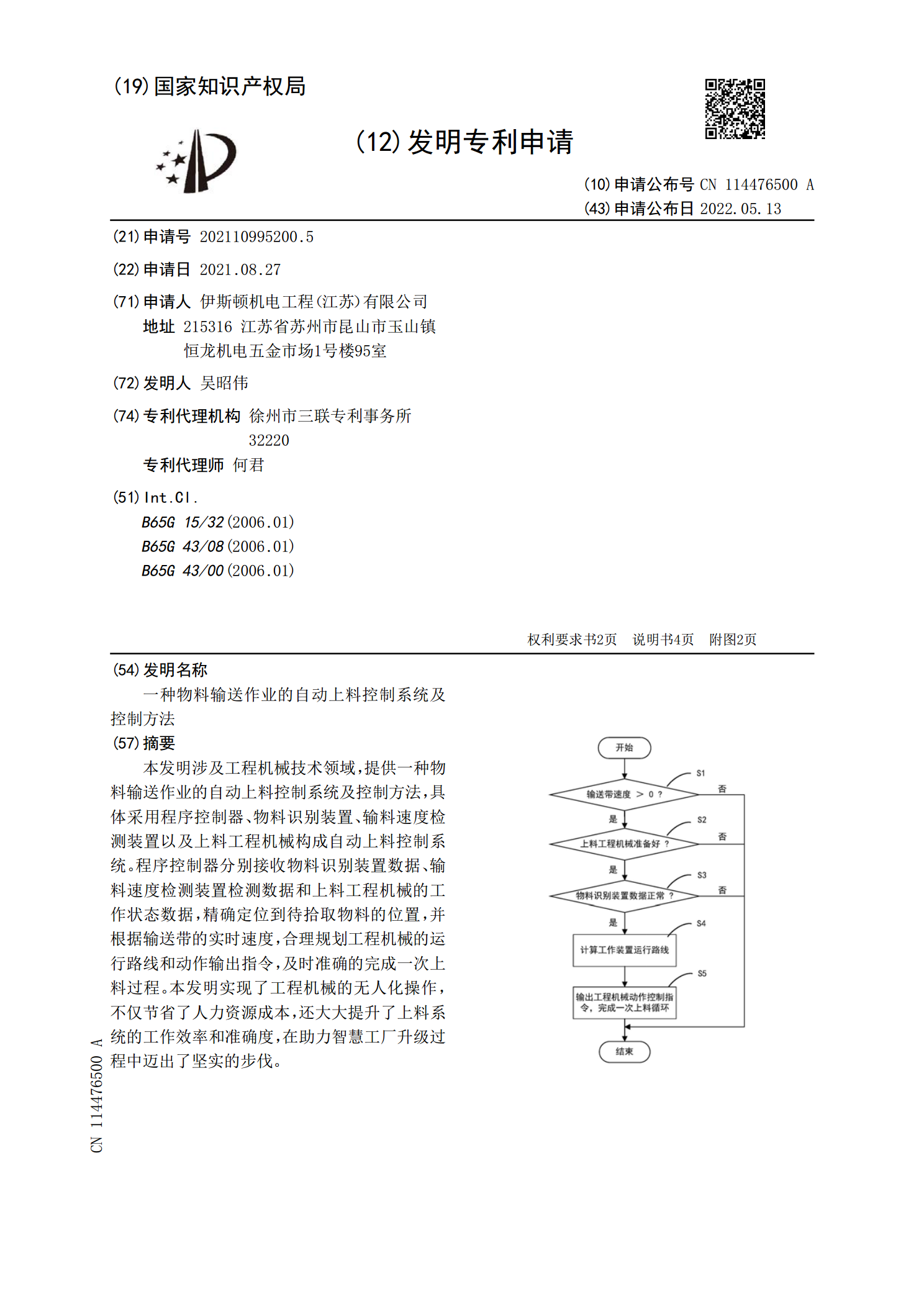
本发明涉及工程机械技术领域,提供一种物料输送作业的自动上料控制系统及控制方法,具体采用程序控制器、物料识别装置、输料速度检测装置以及上料工程机械构成自动上料控制系统。程序控制器分别接收物料识别装置数据、输料速度检测装置检测数据和上料工程机械的工作状态数据,精确定位到待拾取物料的位置,并根据输送带的实时速度,合理规划工程机械的运行路线和动作输出指令,及时准确的完成一次上料过程。本发明实现了工程机械的无人化操作,不仅节省了人力资源成本,还大大提升了上料系统的工作效率和准确度,在助力智慧工厂升级过程中迈出了坚实

一种原料自动上料控制系统及控制方法.pdf
本发明提供一种原料自动上料控制系统及控制方法。本发明的原料自动上料控制系统包括PLC控制系统,所述的PLC控制系统连接上位机系统、人工智能库、检测单元、定位装置和驱动装置;所述的PLC控制系统用于接收来自上位机、人工智能库、检测单元和驱动装置的信息,计算处理数据,并实施对驱动装置的自动控制;所述的上位机用于对控制对象参数设定;所述的人工智能库用于将生产经验与设备维护经验进行程序化设计。采用本发明,操作人员只要通过参数的设定,人工智能库计算目标位置,PLC系统根据目标设定的要求,自动及时准确控制小车定位。
一种自动上料输送装置.pdf
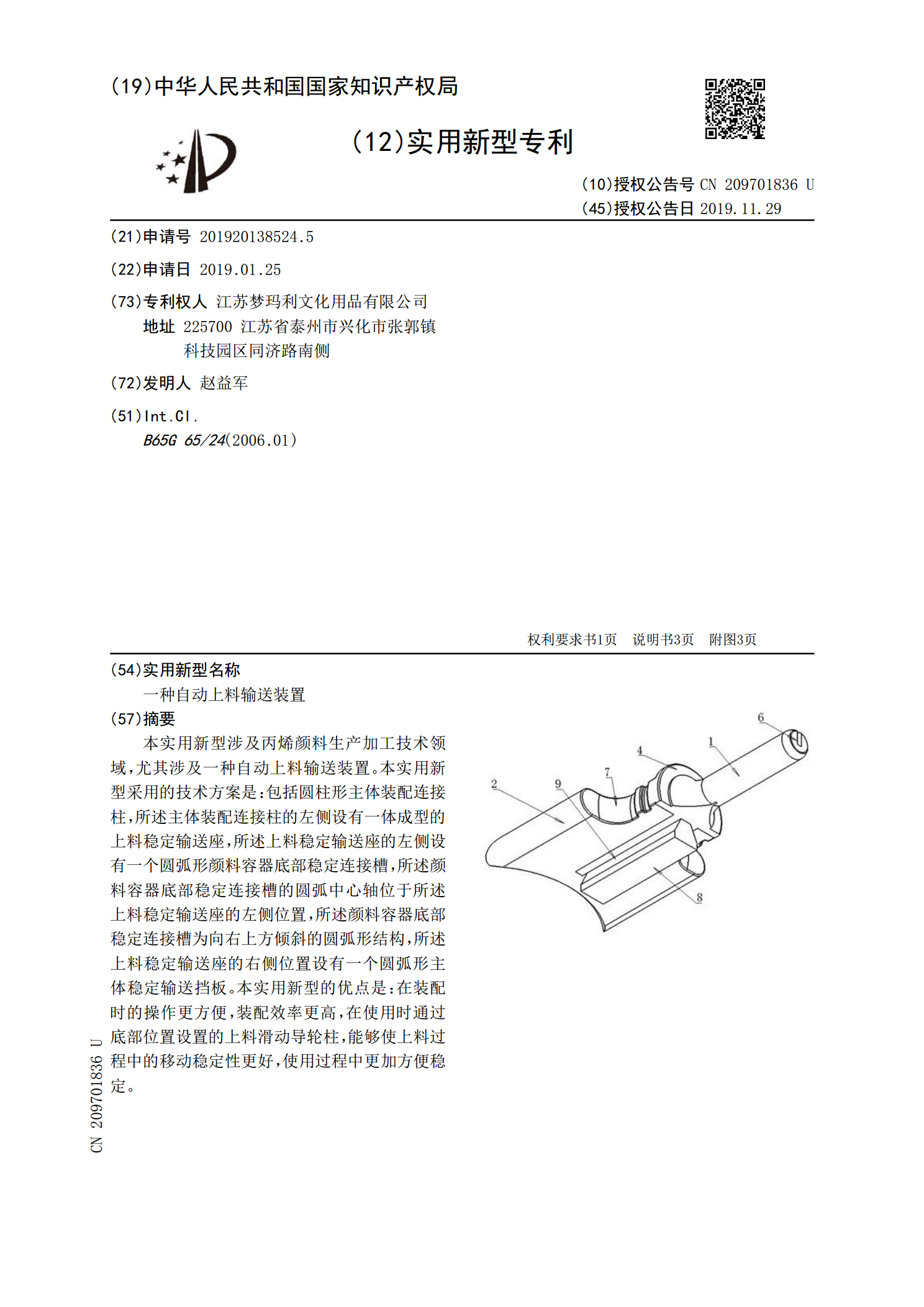
本实用新型涉及丙烯颜料生产加工技术领域,尤其涉及一种自动上料输送装置。本实用新型采用的技术方案是:包括圆柱形主体装配连接柱,所述主体装配连接柱的左侧设有一体成型的上料稳定输送座,所述上料稳定输送座的左侧设有一个圆弧形颜料容器底部稳定连接槽,所述颜料容器底部稳定连接槽的圆弧中心轴位于所述上料稳定输送座的左侧位置,所述颜料容器底部稳定连接槽为向右上方倾斜的圆弧形结构,所述上料稳定输送座的右侧位置设有一个圆弧形主体稳定输送挡板。本实用新型的优点是:在装配时的操作更方便,装配效率更高,在使用时通过底部位置设置的上

一种风力输送易碎物料自适应控制系统.pdf
本发明公开了一种风力输送易碎物料自适应控制系统,系统包括彼此电连接的PLC智能控制器、智能节电器和输送装置;输送装置包括与智能节电器电连接的离心通风机,离心通风机输出端通过输送管道连接有第一卷包机,输送管道包括与离心通风机连接的总管道和与第一卷包机连接的第一支管道,总管道与第一支管道连通;第一支管道上从靠近第一卷包机一端到靠近总管道一端依次设有第一气动调节蝶阀、第一气动调节阀、第一压力变送器和第一流量计;总管道上设有蝶阀,蝶阀位于离心通风机与第一支管道之间;第一支管与第一卷包机之间通过第一气动切断阀连接;
物料自动上料装置.pdf
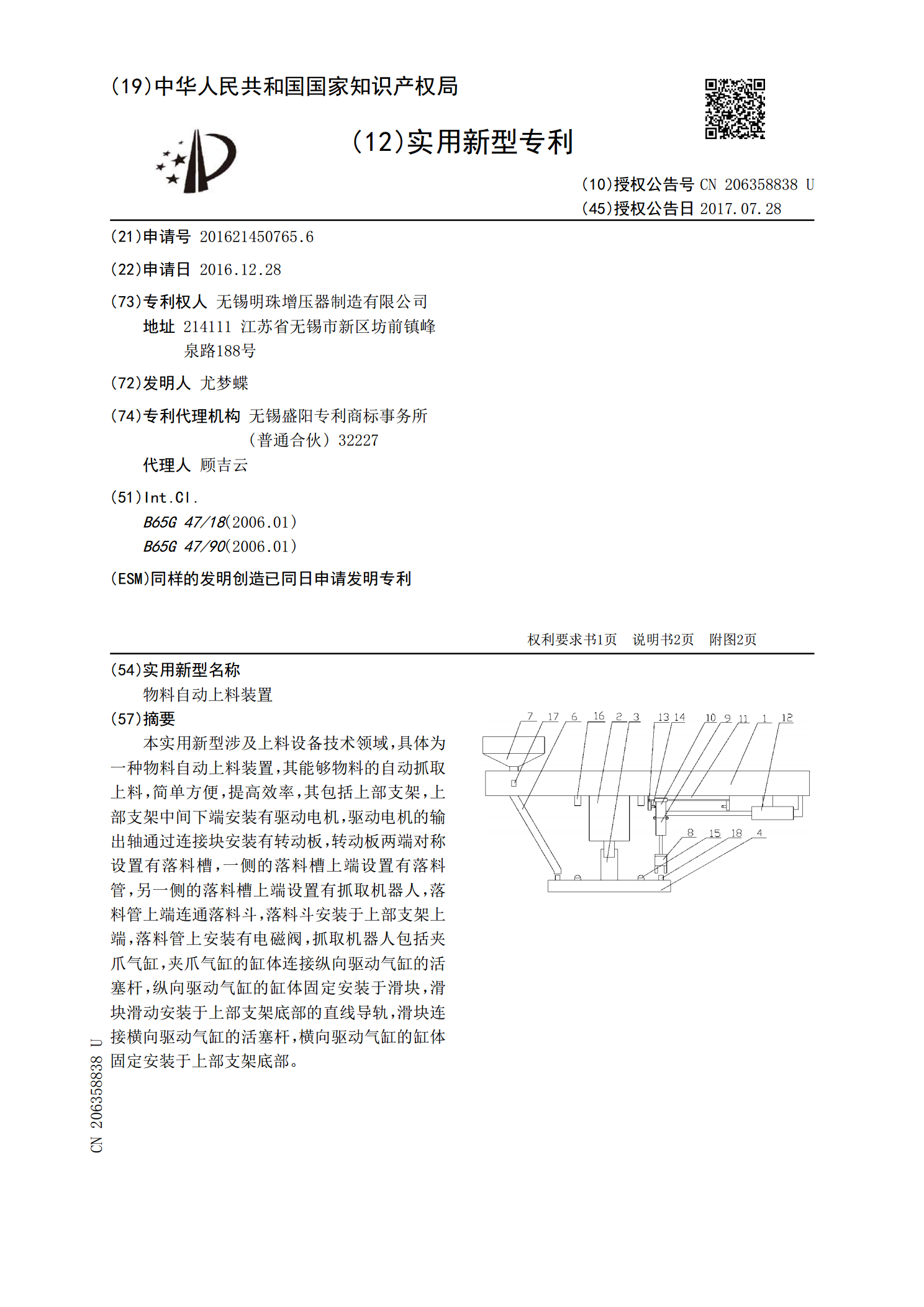
本实用新型涉及上料设备技术领域,具体为一种物料自动上料装置,其能够物料的自动抓取上料,简单方便,提高效率,其包括上部支架,上部支架中间下端安装有驱动电机,驱动电机的输出轴通过连接块安装有转动板,转动板两端对称设置有落料槽,一侧的落料槽上端设置有落料管,另一侧的落料槽上端设置有抓取机器人,落料管上端连通落料斗,落料斗安装于上部支架上端,落料管上安装有电磁阀,抓取机器人包括夹爪气缸,夹爪气缸的缸体连接纵向驱动气缸的活塞杆,纵向驱动气缸的缸体固定安装于滑块,滑块滑动安装于上部支架底部的直线导轨,滑块连接横向驱动