
多自由度并联机构.pdf

莉娜****ua

1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多自由度并联机构.pdf
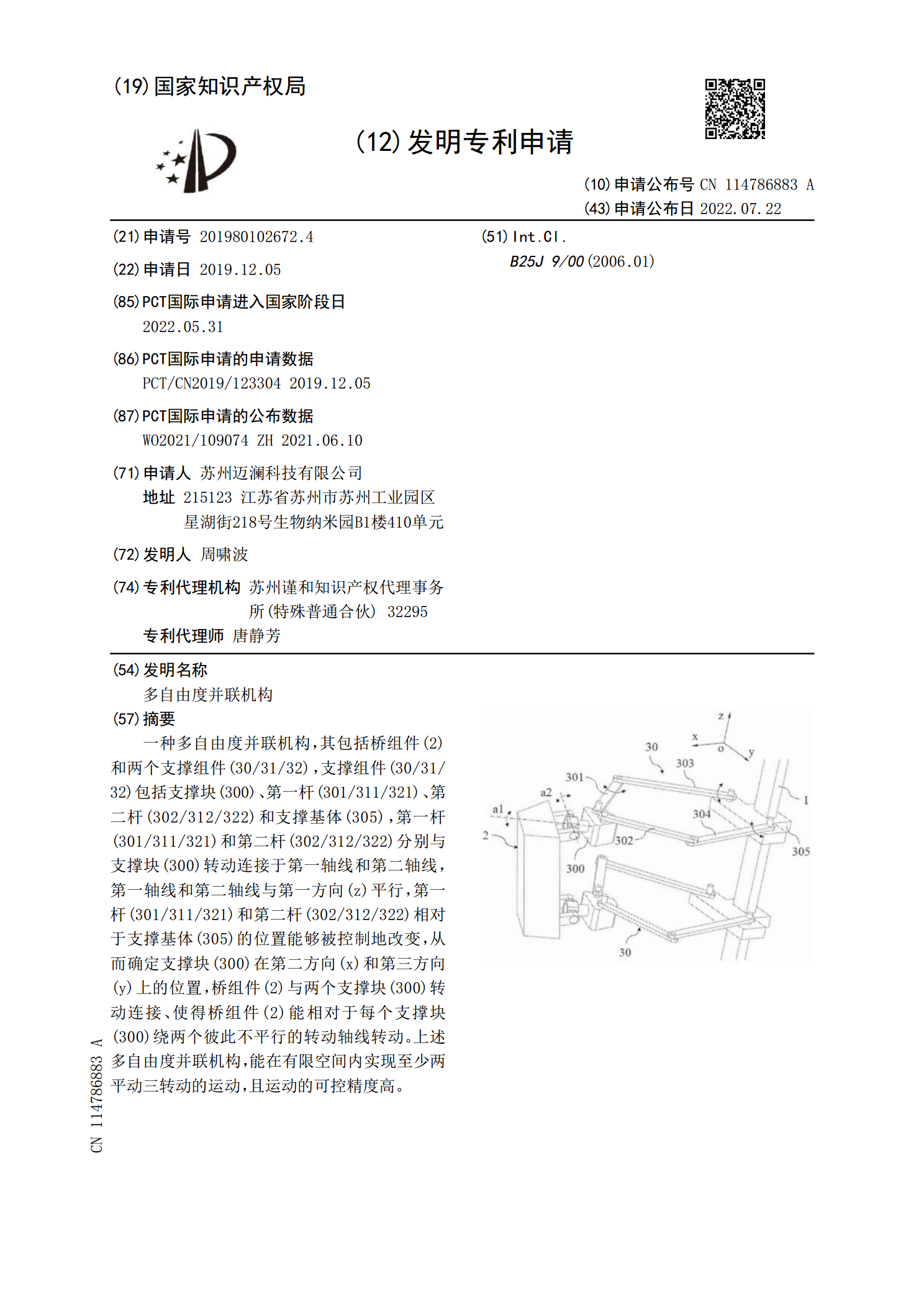
一种多自由度并联机构,其包括桥组件(2)和两个支撑组件(30/31/32),支撑组件(30/31/32)包括支撑块(300)、第一杆(301/311/321)、第二杆(302/312/322)和支撑基体(305),第一杆(301/311/321)和第二杆(302/312/322)分别与支撑块(300)转动连接于第一轴线和第二轴线,第一轴线和第二轴线与第一方向(z)平行,第一杆(301/311/321)和第二杆(302/312/322)相对于支撑基体(305)的位置能够被控制地改变,从而确定支撑块(300)
多自由度并联机构.pdf
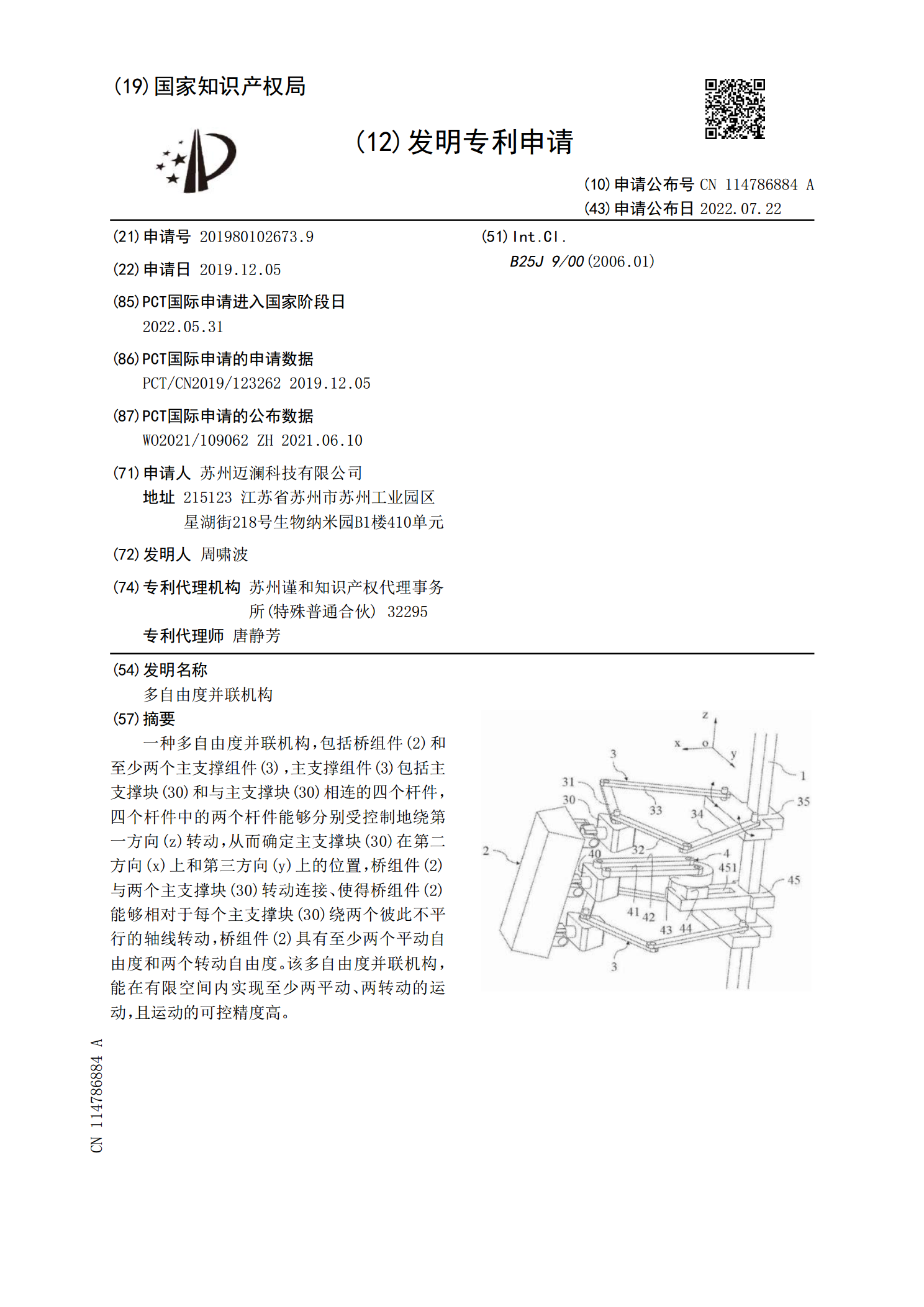
一种多自由度并联机构,包括桥组件(2)和至少两个主支撑组件(3),主支撑组件(3)包括主支撑块(30)和与主支撑块(30)相连的四个杆件,四个杆件中的两个杆件能够分别受控制地绕第一方向(z)转动,从而确定主支撑块(30)在第二方向(x)上和第三方向(y)上的位置,桥组件(2)与两个主支撑块(30)转动连接、使得桥组件(2)能够相对于每个主支撑块(30)绕两个彼此不平行的轴线转动,桥组件(2)具有至少两个平动自由度和两个转动自由度。该多自由度并联机构,能在有限空间内实现至少两平动、两转动的运动,且运动的可控

多自由度并联机构.pdf
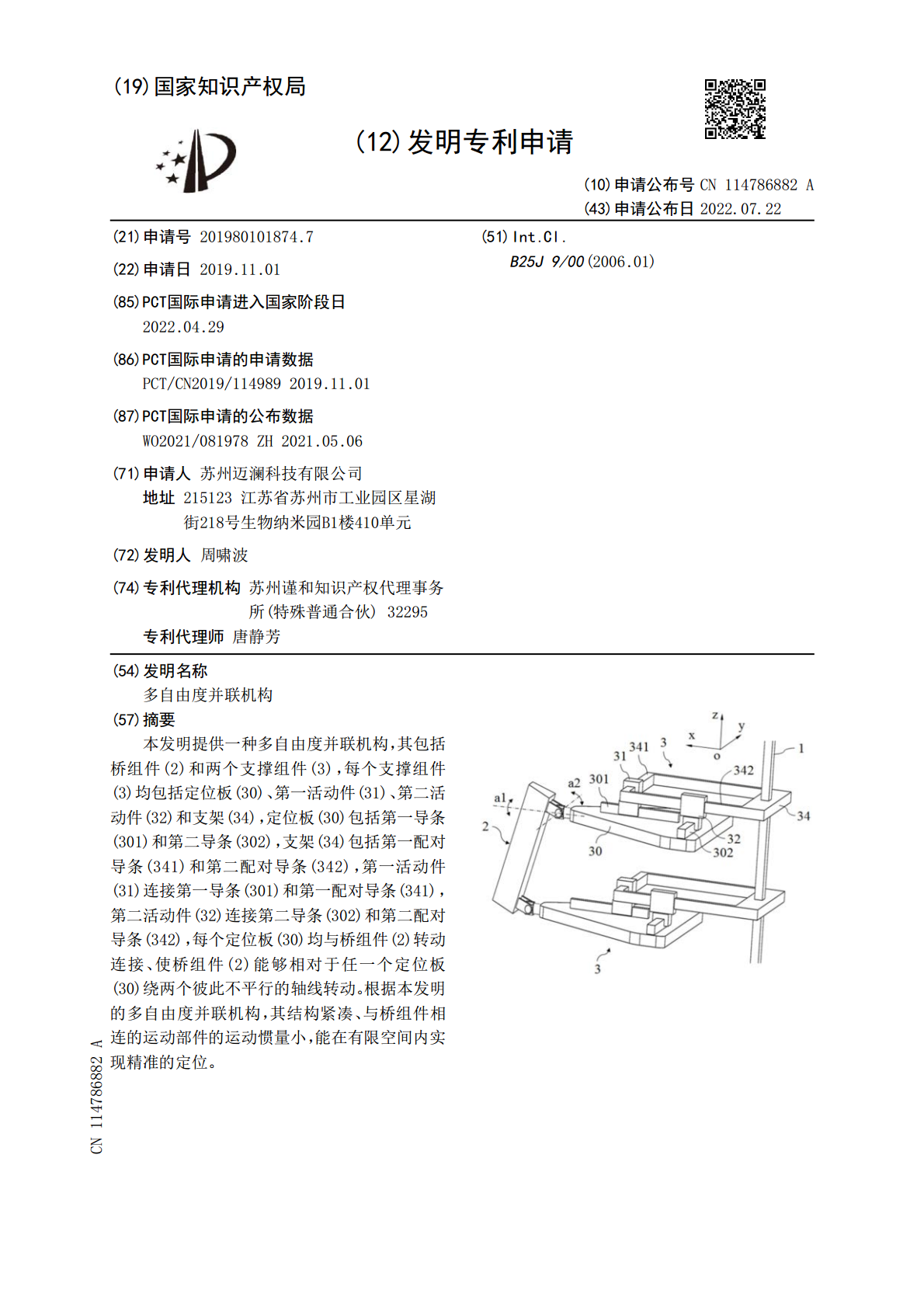
本发明提供一种多自由度并联机构,其包括桥组件(2)和两个支撑组件(3),每个支撑组件(3)均包括定位板(30)、第一活动件(31)、第二活动件(32)和支架(34),定位板(30)包括第一导条(301)和第二导条(302),支架(34)包括第一配对导条(341)和第二配对导条(342),第一活动件(31)连接第一导条(301)和第一配对导条(341),第二活动件(32)连接第二导条(302)和第二配对导条(342),每个定位板(30)均与桥组件(2)转动连接、使桥组件(2)能够相对于任一个定位板(30)绕
多自由度并联机构.pdf
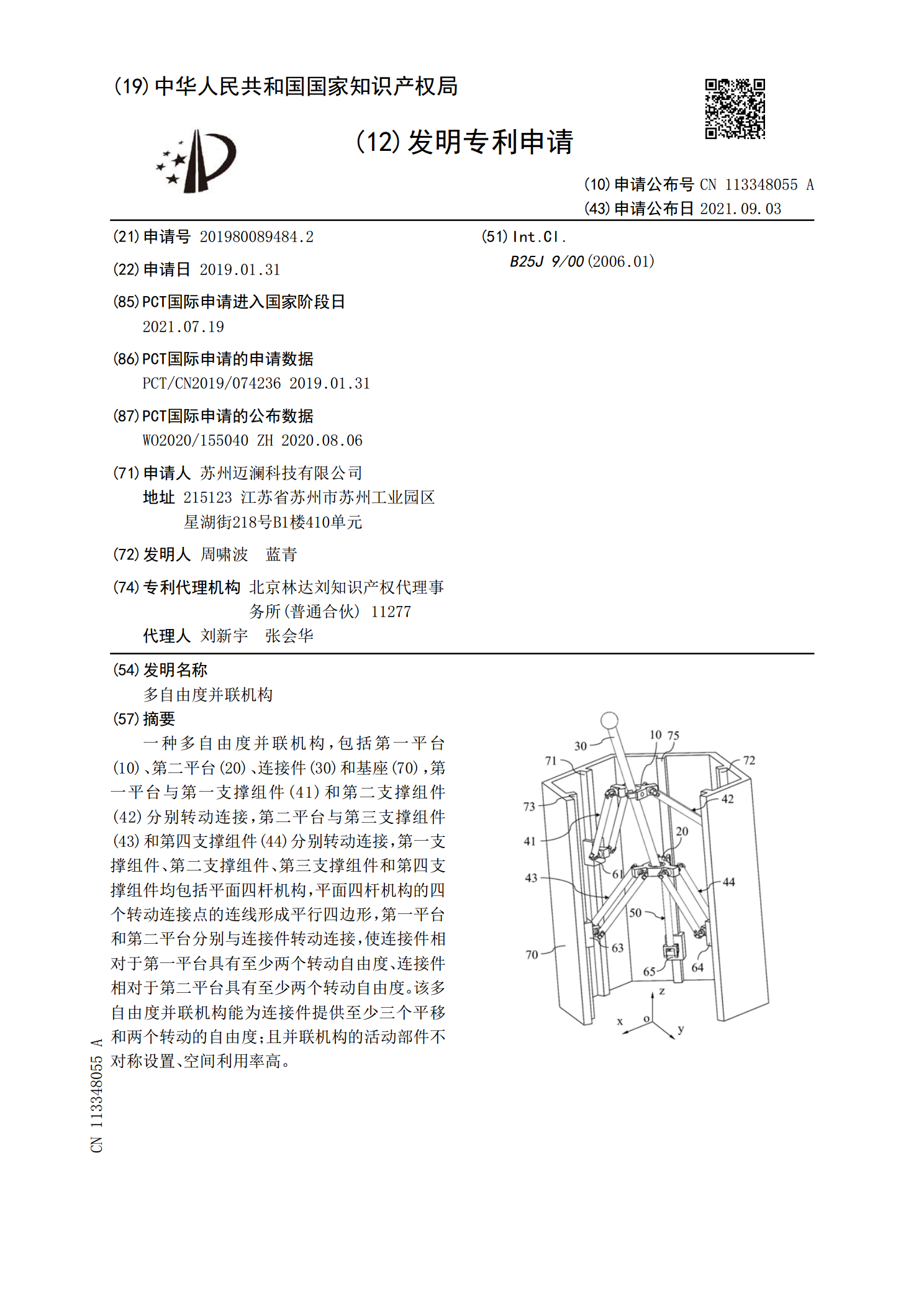
一种多自由度并联机构,包括第一平台(10)、第二平台(20)、连接件(30)和基座(70),第一平台与第一支撑组件(41)和第二支撑组件(42)分别转动连接,第二平台与第三支撑组件(43)和第四支撑组件(44)分别转动连接,第一支撑组件、第二支撑组件、第三支撑组件和第四支撑组件均包括平面四杆机构,平面四杆机构的四个转动连接点的连线形成平行四边形,第一平台和第二平台分别与连接件转动连接,使连接件相对于第一平台具有至少两个转动自由度、连接件相对于第二平台具有至少两个转动自由度。该多自由度并联机构能为连接件提供
多自由度并联机构.pdf
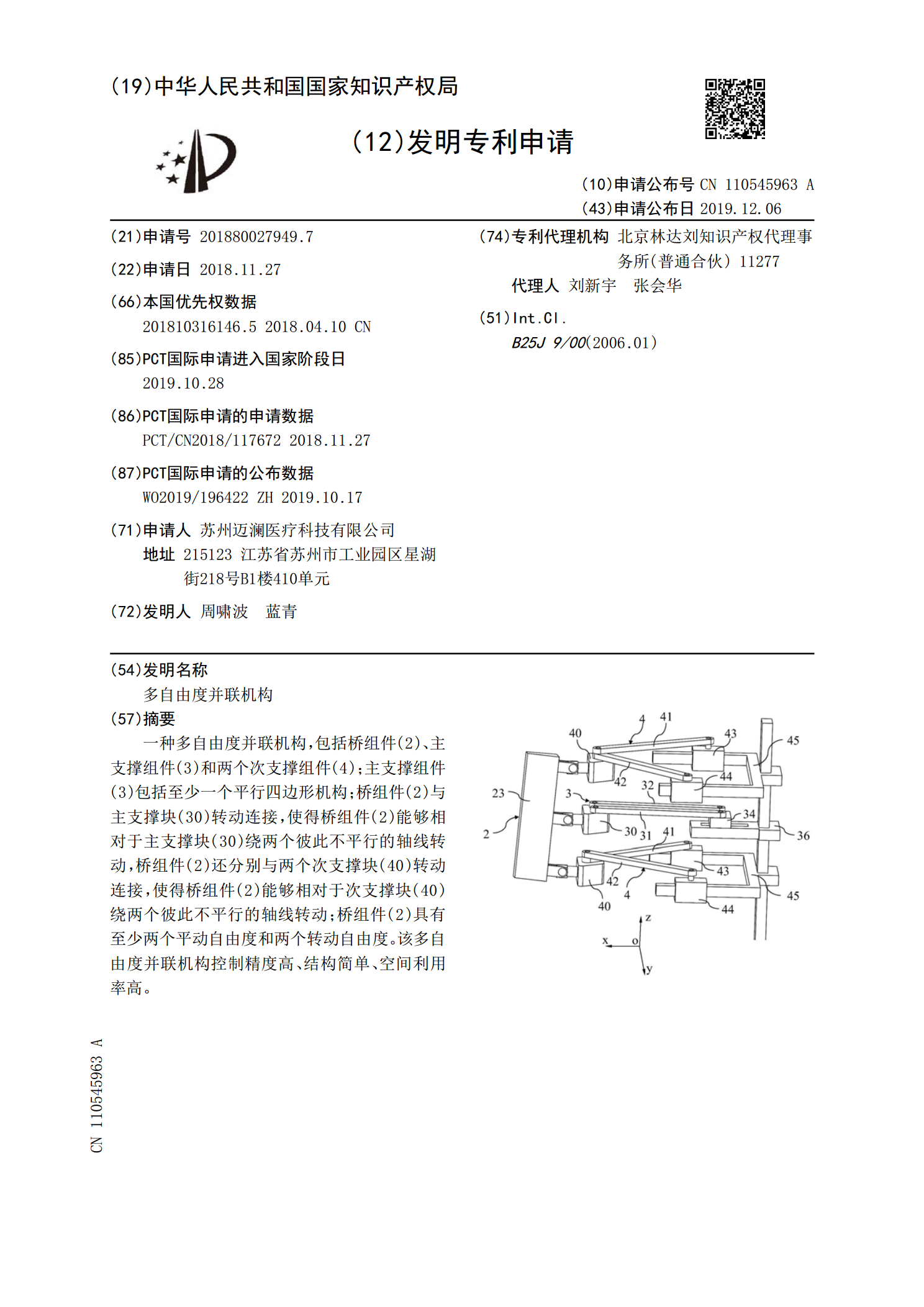
一种多自由度并联机构,包括桥组件(2)、主支撑组件(3)和两个次支撑组件(4);主支撑组件(3)包括至少一个平行四边形机构;桥组件(2)与主支撑块(30)转动连接,使得桥组件(2)能够相对于主支撑块(30)绕两个彼此不平行的轴线转动,桥组件(2)还分别与两个次支撑块(40)转动连接,使得桥组件(2)能够相对于次支撑块(40)绕两个彼此不平行的轴线转动;桥组件(2)具有至少两个平动自由度和两个转动自由度。该多自由度并联机构控制精度高、结构简单、空间利用率高。