
一种FPSO上部模块吊装姿态检测及调整方法.pdf

文阁****23


1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种FPSO上部模块吊装姿态检测及调整方法.pdf
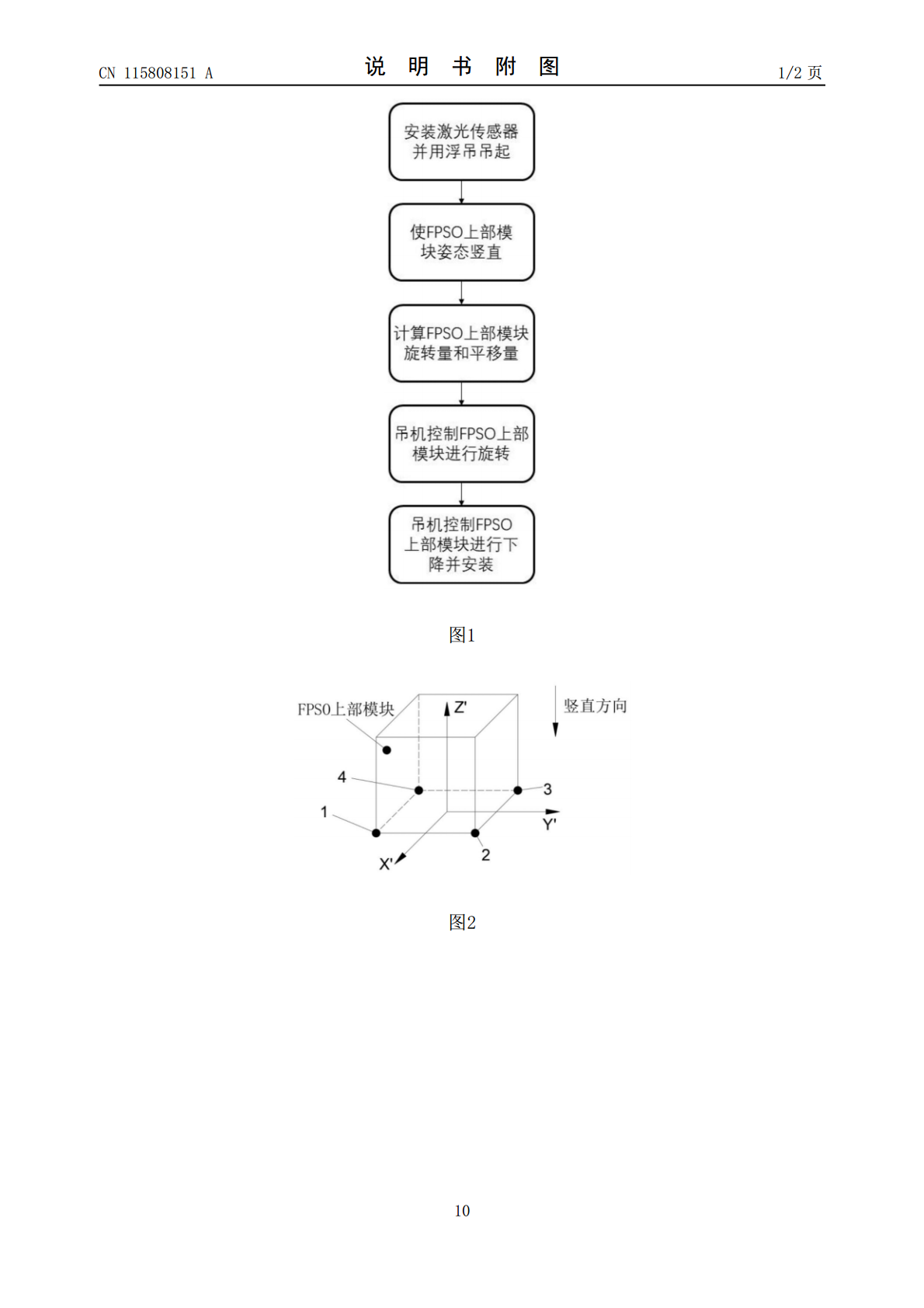
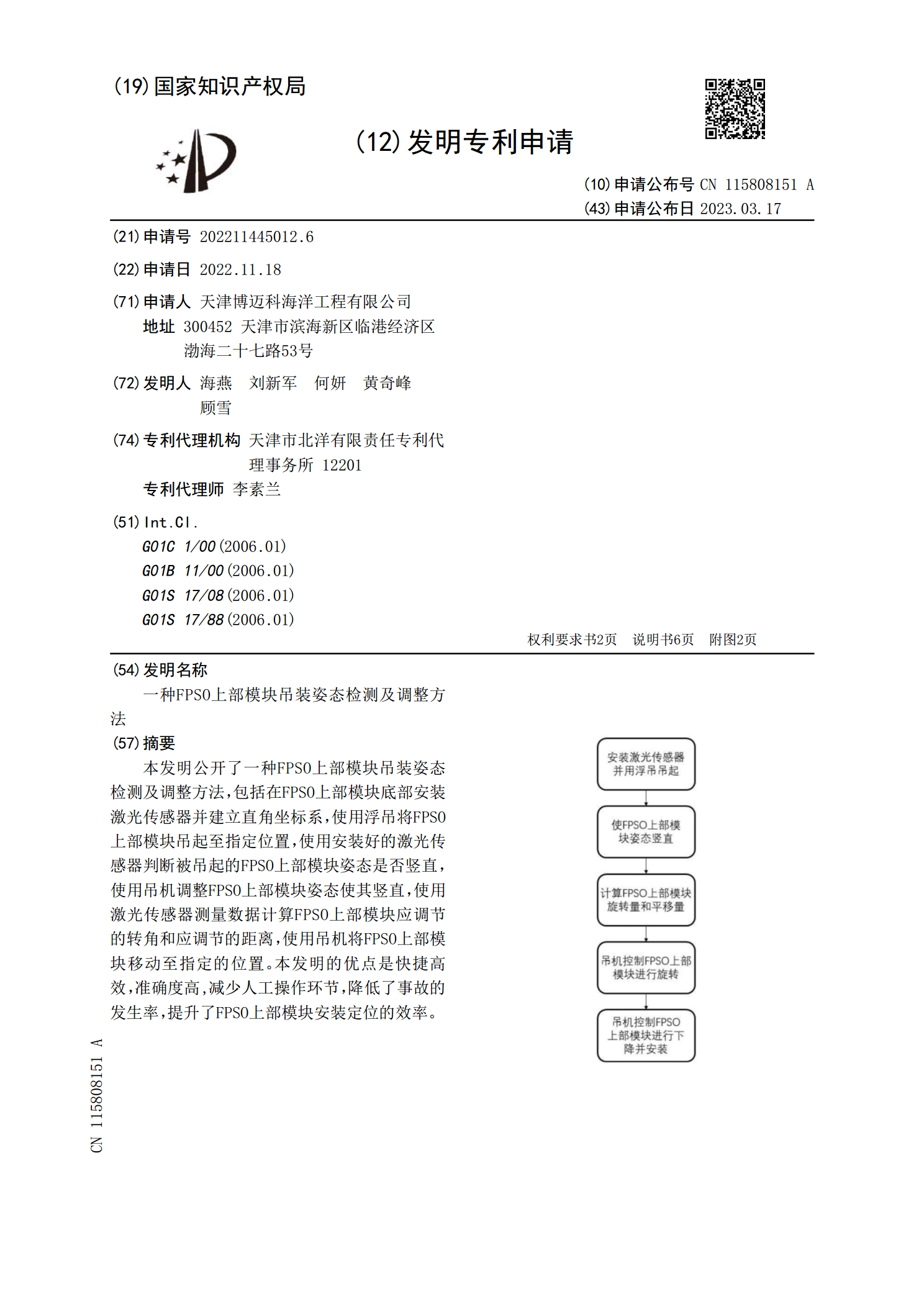
本发明公开了一种FPSO上部模块吊装姿态检测及调整方法,包括在FPSO上部模块底部安装激光传感器并建立直角坐标系,使用浮吊将FPSO上部模块吊起至指定位置,使用安装好的激光传感器判断被吊起的FPSO上部模块姿态是否竖直,使用吊机调整FPSO上部模块姿态使其竖直,使用激光传感器测量数据计算FPSO上部模块应调节的转角和应调节的距离,使用吊机将FPSO上部模块移动至指定的位置。本发明的优点是快捷高效,准确度高,减少人工操作环节,降低了事故的发生率,提升了FPSO上部模块安装定位的效率。

模块化机械臂、吊装系统及姿态调整方法.pdf
本发明提供一种模块化机械臂、吊装系统及姿态调整方法,用于解决现有技术中无法对待吊装物件的姿态进行实时调整的问题。本发明提供一种模块化机械臂,包括:安装台和基座,所述基座转动安装在所述安装台上,所述基座上设有驾驶室和控制器;吊臂和第一驱动件,所述吊臂为可伸缩结构,所述吊臂下端铰接安装在所述基座上,所述第一驱动件驱动所述吊臂翻转;承重拉索机构,所述承重拉索机构包括承重拉索、承重拉索驱动件、顶部滑轮组和承重吊钩;姿态调整机构,所述姿态调整机构包括第一姿态调整拉索、第一姿态调整驱动件、第一中部滑轮组和第一姿态调整
吊装工具及FPSO的模块支墩的吊装方法.pdf
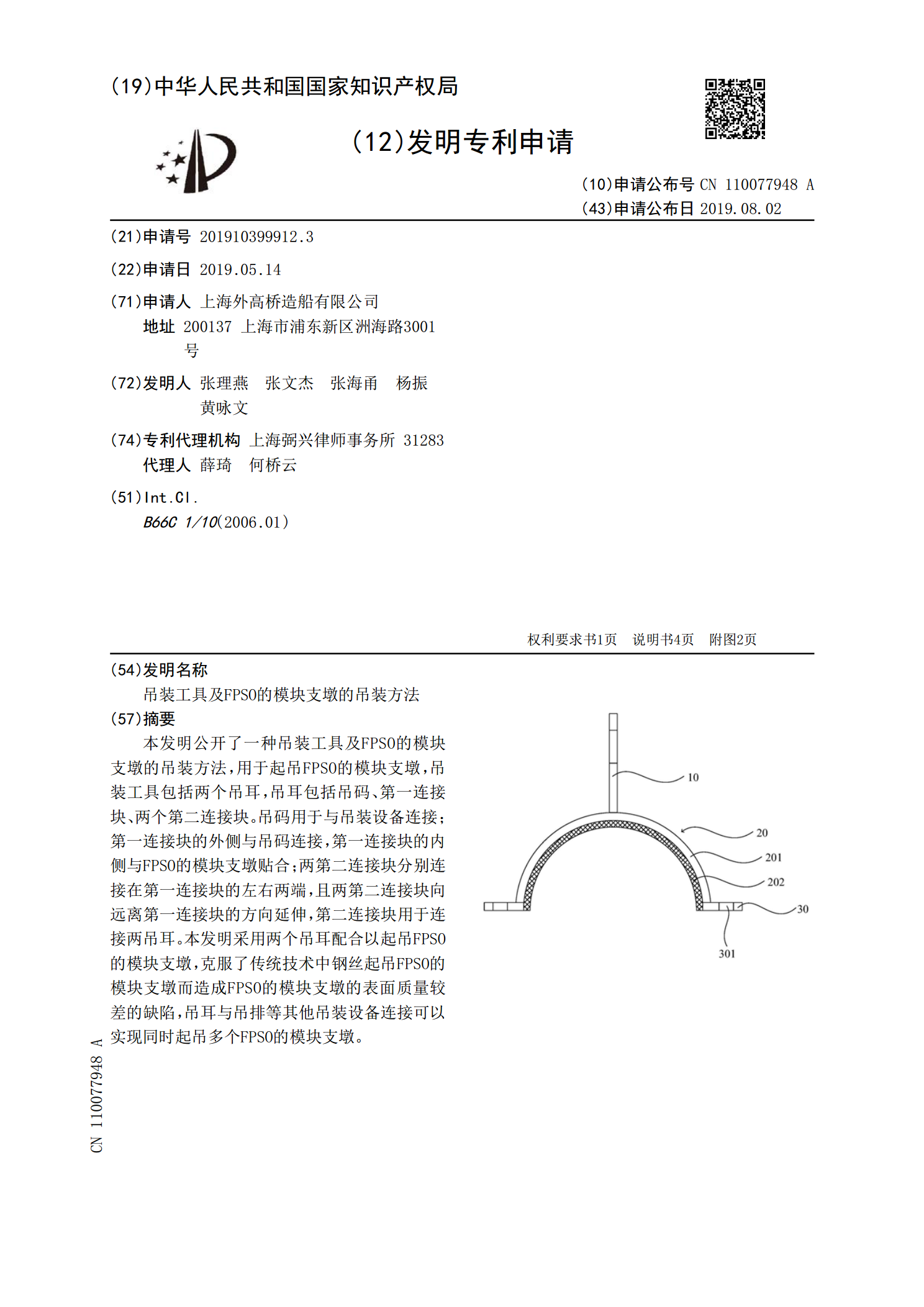
本发明公开了一种吊装工具及FPSO的模块支墩的吊装方法,用于起吊FPSO的模块支墩,吊装工具包括两个吊耳,吊耳包括吊码、第一连接块、两个第二连接块。吊码用于与吊装设备连接;第一连接块的外侧与吊码连接,第一连接块的内侧与FPSO的模块支墩贴合;两第二连接块分别连接在第一连接块的左右两端,且两第二连接块向远离第一连接块的方向延伸,第二连接块用于连接两吊耳。本发明采用两个吊耳配合以起吊FPSO的模块支墩,克服了传统技术中钢丝起吊FPSO的模块支墩而造成FPSO的模块支墩的表面质量较差的缺陷,吊耳与吊排等其他吊装
支撑FPSO上部模块的球型轴承安装方法.pdf
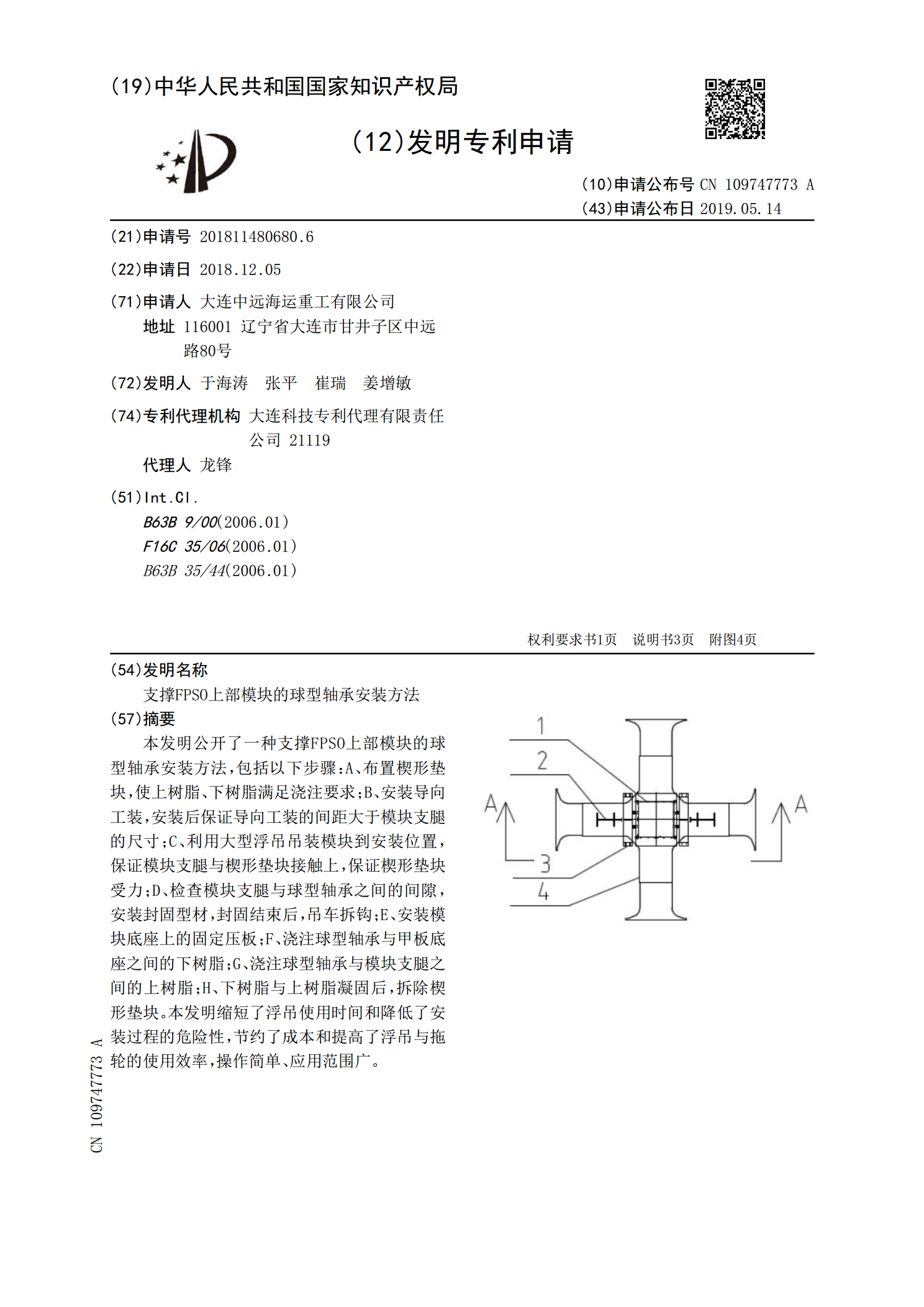
本发明公开了一种支撑FPSO上部模块的球型轴承安装方法,包括以下步骤:A、布置楔形垫块,使上树脂、下树脂满足浇注要求;B、安装导向工装,安装后保证导向工装的间距大于模块支腿的尺寸;C、利用大型浮吊吊装模块到安装位置,保证模块支腿与楔形垫块接触上,保证楔形垫块受力;D、检查模块支腿与球型轴承之间的间隙,安装封固型材,封固结束后,吊车拆钩;E、安装模块底座上的固定压板;F、浇注球型轴承与甲板底座之间的下树脂;G、浇注球型轴承与模块支腿之间的上树脂;H、下树脂与上树脂凝固后,拆除楔形垫块。本发明缩短了浮吊使用时

一种海洋FPSO上部模块组合支撑结构.pdf
本发明涉及一种海洋FPSO上部模块组合支撑结构,它主要由滑动端箱体、挡板、滑动支撑垫板、固定端箱体、固定支撑垫板、支撑底板、支撑立管、肘板、斜支撑管、筋板、模块甲板垫板、船体甲板和模块甲板组成;所述滑动端箱体、挡板、滑动支撑垫板焊接固定,构成柔性连接的滑动箱式支墩;固定端箱体、固定支撑垫板焊接固定,构成刚性连接的固定箱式支墩;支撑底板、支撑立管、肘板、斜支撑管、筋板、模块甲板垫片,采用斗拱设计思想,焊接组立成管式支撑连接结构;船体甲板用于布置安装上部模块,两端滑动箱式支墩与中间固定箱式支墩组合支撑结构,模