
一种三维图像的数字水印方法.pdf

如灵****姐姐

1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种三维图像的数字水印方法.pdf
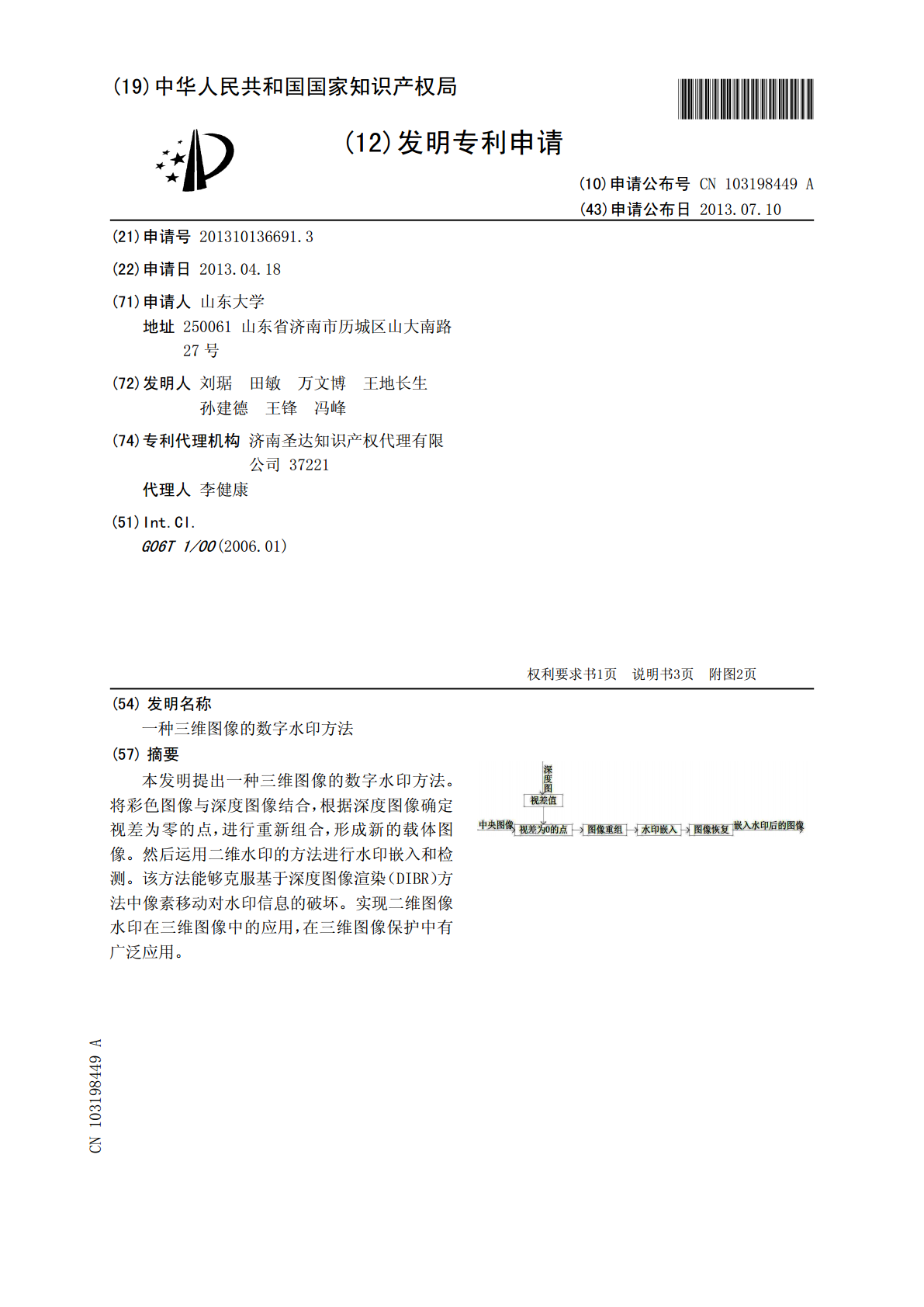
本发明提出一种三维图像的数字水印方法。将彩色图像与深度图像结合,根据深度图像确定视差为零的点,进行重新组合,形成新的载体图像。然后运用二维水印的方法进行水印嵌入和检测。该方法能够克服基于深度图像渲染(DIBR)方法中像素移动对水印信息的破坏。实现二维图像水印在三维图像中的应用,在三维图像保护中有广泛应用。

一种彩色图像快速盲数字水印方法及提取方法.pdf
本发明涉及一种数字媒体信息安全技术,涉及一种彩色数字图像的快速盲数字水印方法及提取方法。本发明是通过待嵌入的数字水印信息为二进制的0/1字符串,然后待嵌入数字水印的原始数字图片为RGB彩色图像,再将离散小波变换的层级,将三个方向的分量分割成多个方块,再转换为RGB水印图片,并对水印进行计算容量。本发明的优点是采用本方案的彩色图像数字水印具有较好的不可见性,满足了水印算法的不可见性要求;同时采用本方案的数字水印在彩色载体图片经过格式转换、被涂改、JPEG压缩等情况下都有较好的鲁棒性。另外,该算法的平均运行时

数字图像处理数字水印埋入方法D-F.ppt
D.I.P.嵌入方法Before:D:ChoiceofMiddle-FrequencyCoefficientsE:ModificationoftheDCTCoefficients(1)插入到临近块之间的关系考虑量化(quantization)的影响:(2)插入每个块内的关系为了解决此问题,同时不更改相邻块(soastoimprovetheinvisibility),用相对来说更可靠的DC系数作为每个块的参考值。——系数变换的整个流程F:块的反变换:

一种基于深度图像绘制的三维视频数字水印技术.pdf
本发明公开了一种基于深度图像绘制的三维视频数字水印技术,主要利用基于深度图像绘制(depth‑image‑basedrendering,简称DIBR)的三维图像载体丰富,具有中心视图、深度图和左右视点图像,而且生成的左右视点图像具有极高的相似性的特点。首先,本发明结合DIBR渲染规则来构造稳定特征数据作为水印嵌入位置的选择标准。其次,本发明设计了基于渲染的左右视点图像相似性的联合水印提取策略。依据本发明为一种基于深度图像绘制的三维视频数字水印技术,生成水印的鲁棒性更高,且不易被察觉。
一种自适应彩色数字图像盲水印方法.pdf
本发明利用变换域数字水印算法鲁棒性强的优点,公开了一种自适应彩色数字图像盲水印方法。本发明在不同的图像块中自适应地选择不同的嵌入系数,并在变换域中修改二维离散余弦变换后的部分中频系数,从而完成彩色数字水印的嵌入与盲提取;在水印预处理阶段,先后使用了仿射变换和Arnold变换对水印进行了双重加密,大大提高了水印算法的安全性。该发明将彩色图像水印嵌入到彩色宿主图像中,不但具有较好的水印不可见性和较强的鲁棒性,而且具有很高的安全性,适用于数字图像版权保护的场合。