
基于GPU编程实现激光雷达场景仿真方法.pdf

灵波****ng

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于GPU编程实现激光雷达场景仿真方法.pdf
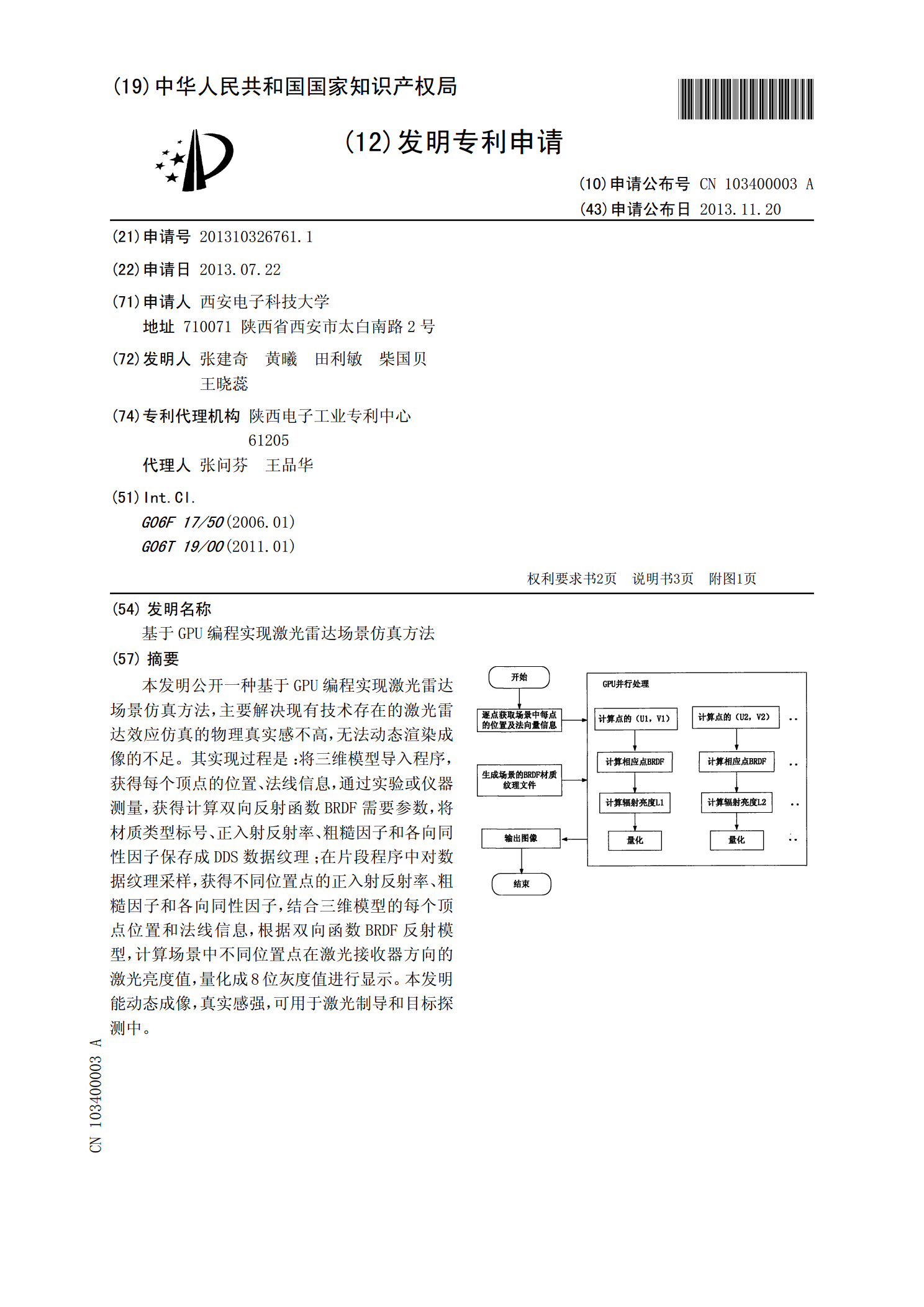
本发明公开一种基于GPU编程实现激光雷达场景仿真方法,主要解决现有技术存在的激光雷达效应仿真的物理真实感不高,无法动态渲染成像的不足。其实现过程是:将三维模型导入程序,获得每个顶点的位置、法线信息,通过实验或仪器测量,获得计算双向反射函数BRDF需要参数,将材质类型标号、正入射反射率、粗糙因子和各向同性因子保存成DDS数据纹理;在片段程序中对数据纹理采样,获得不同位置点的正入射反射率、粗糙因子和各向同性因子,结合三维模型的每个顶点位置和法线信息,根据双向函数BRDF反射模型,计算场景中不同位置点在激光接收

基于目标特征模型和GPU的红外场景仿真方法研究的中期报告.docx
基于目标特征模型和GPU的红外场景仿真方法研究的中期报告中期报告-基于目标特征模型和GPU的红外场景仿真方法研究一、研究背景红外场景仿真技术是一种基于计算机技术和光学原理的虚拟仿真技术,在军事、航空航天、能源、环境等领域具有广泛的应用。红外场景仿真技术主要是通过模拟目标和环境的红外辐射特性,生成航空器、车辆、建筑等各种场景,并实现模拟各种作战环境和作战情况。二、研究内容本研究旨在探索基于目标特征模型和GPU并行计算的红外场景仿真方法,具体研究内容如下:1.建立目标特征模型通过分析不同目标的红外辐射特性,建
基于GPU光栅器的场景体素化方法.pdf
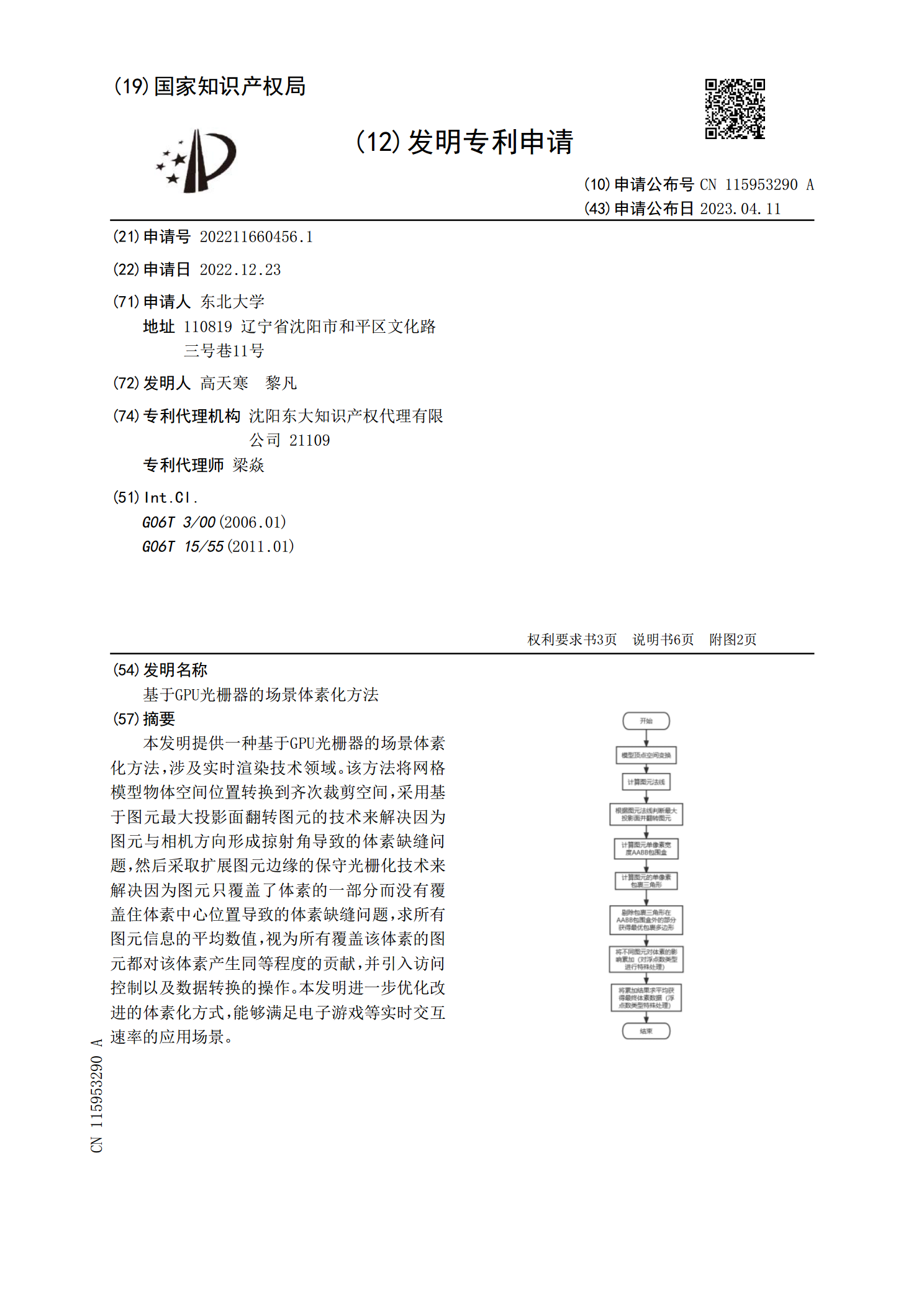
本发明提供一种基于GPU光栅器的场景体素化方法,涉及实时渲染技术领域。该方法将网格模型物体空间位置转换到齐次裁剪空间,采用基于图元最大投影面翻转图元的技术来解决因为图元与相机方向形成掠射角导致的体素缺缝问题,然后采取扩展图元边缘的保守光栅化技术来解决因为图元只覆盖了体素的一部分而没有覆盖住体素中心位置导致的体素缺缝问题,求所有图元信息的平均数值,视为所有覆盖该体素的图元都对该体素产生同等程度的贡献,并引入访问控制以及数据转换的操作。本发明进一步优化改进的体素化方式,能够满足电子游戏等实时交互速率的应用场景

基于D-MAX实现虚拟仿真场景建模.doc
基于DMAX实现虚拟仿真场景建模【实用文档】doc文档可直接使用可编辑,欢迎下载基于3DMAX实现虚拟仿真场景建模摘要:随着现代科技的不断进步和发展,二维信息的展示方式已经不能满足人们信息的获取需要,三维方式已经成为将来信息的展示主流,而虚拟仿真技术作为一门新兴技术,越来越受到人们的关注,并应用于军事、航空、科技、建筑、艺术、商业等领域,它的发展应用日益广泛、普及。本文主要论述虚拟仿真在南水北调穿黄工程中模型制作流程。关键词:3DMAX、虚拟仿真、建模虚拟仿真概述虚拟仿真是近几年十分活跃的技术研究领域,是
基于GPU编程的地下管线自动精细建模方法.pdf
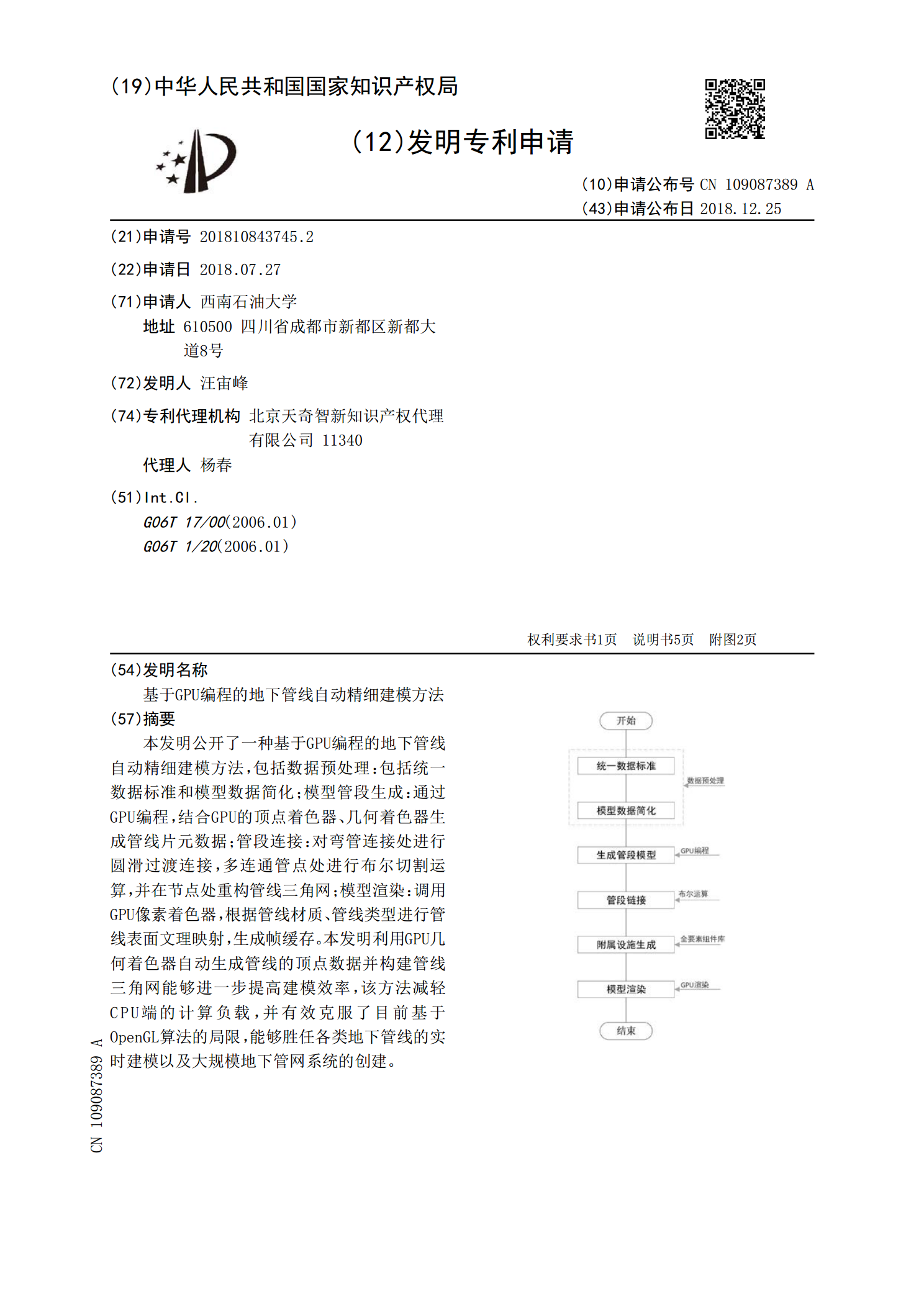
本发明公开了一种基于GPU编程的地下管线自动精细建模方法,包括数据预处理:包括统一数据标准和模型数据简化;模型管段生成:通过GPU编程,结合GPU的顶点着色器、几何着色器生成管线片元数据;管段连接:对弯管连接处进行圆滑过渡连接,多连通管点处进行布尔切割运算,并在节点处重构管线三角网;模型渲染:调用GPU像素着色器,根据管线材质、管线类型进行管线表面文理映射,生成帧缓存。本发明利用GPU几何着色器自动生成管线的顶点数据并构建管线三角网能够进一步提高建模效率,该方法减轻CPU端的计算负载,并有效克服了目前基于