
游戏引擎抠像动态空间切割方法.pdf

岚风****55

1/5
2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
游戏引擎抠像动态空间切割方法.pdf
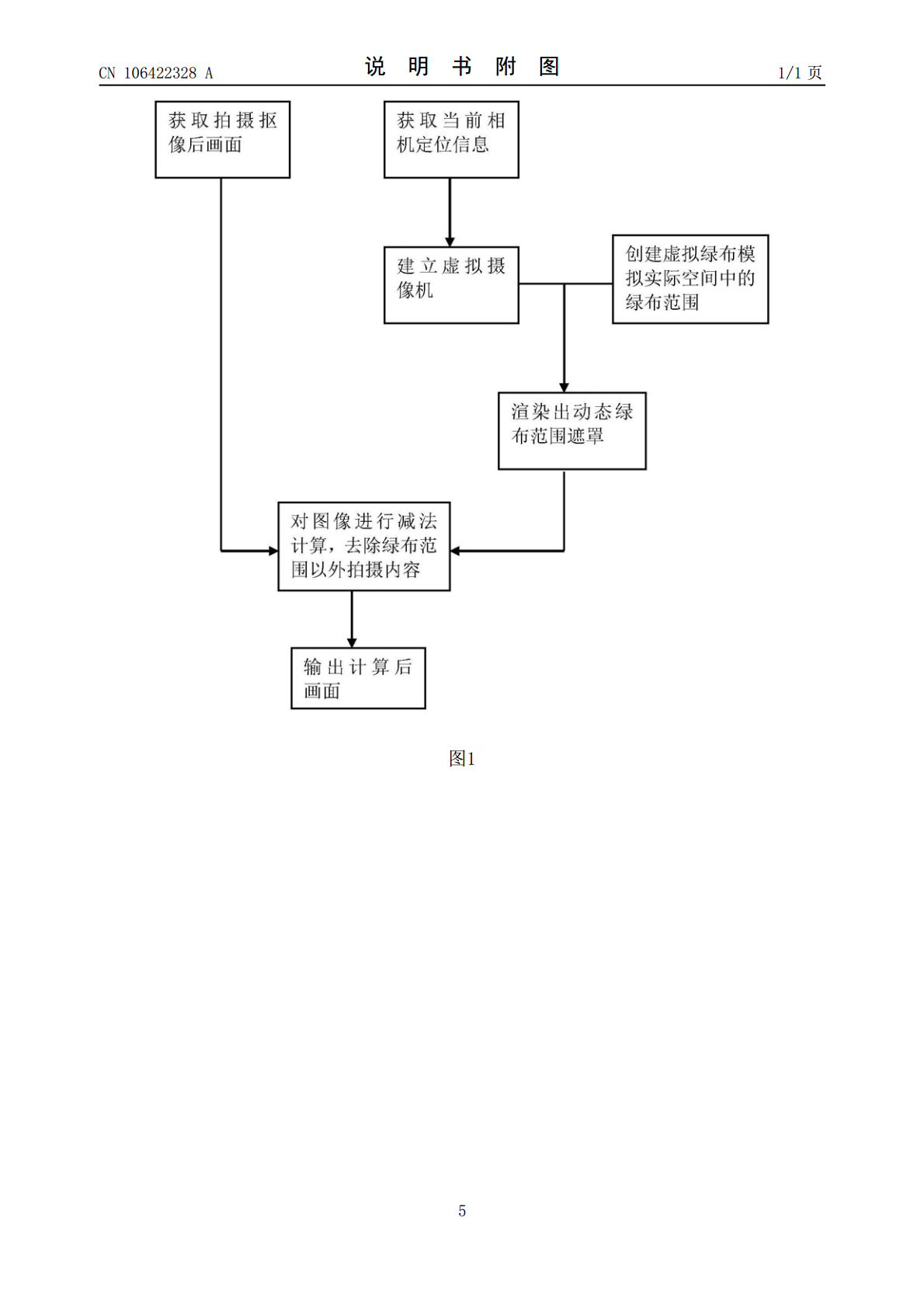
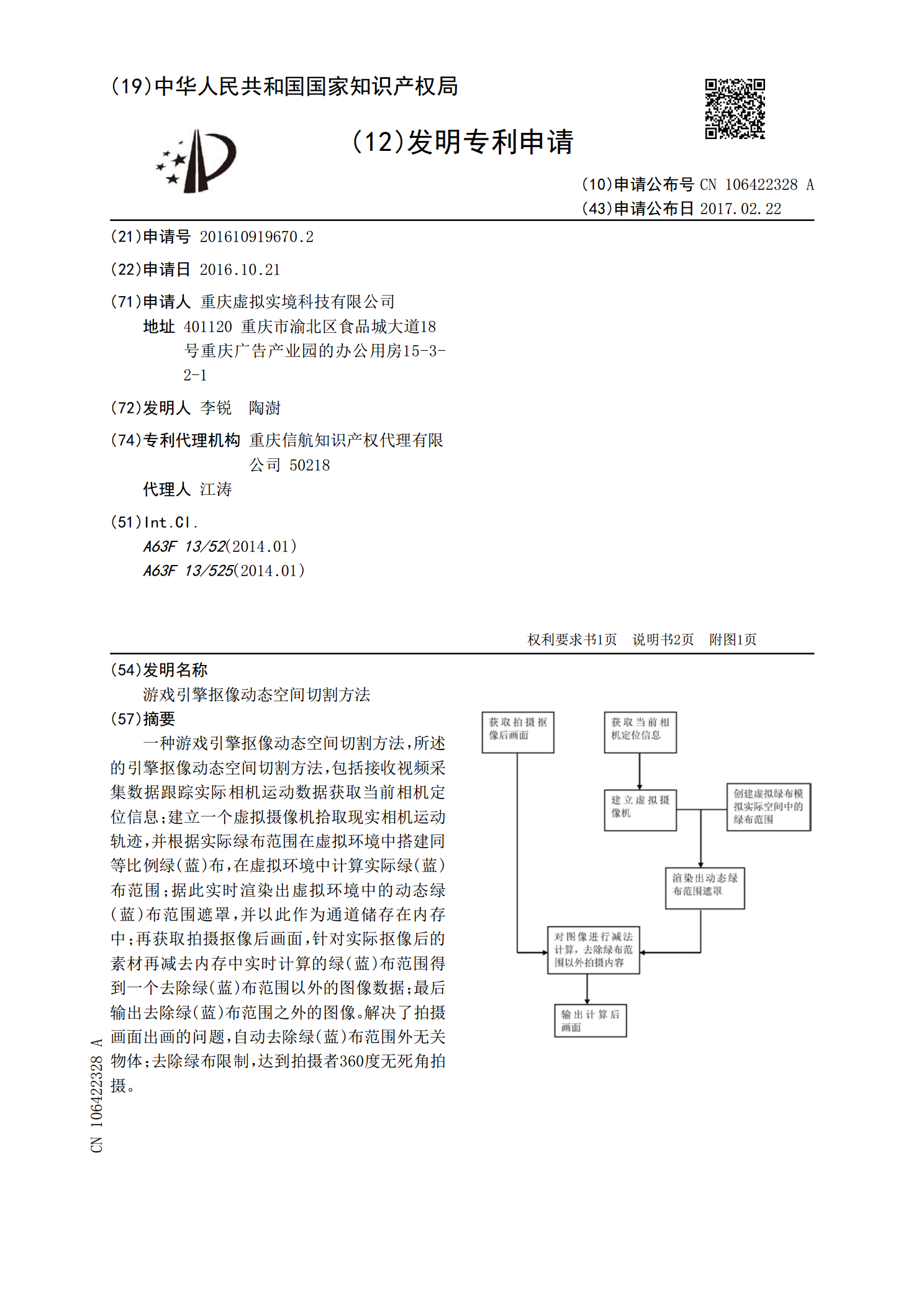
一种游戏引擎抠像动态空间切割方法,所述的引擎抠像动态空间切割方法,包括接收视频采集数据跟踪实际相机运动数据获取当前相机定位信息;建立一个虚拟摄像机拾取现实相机运动轨迹,并根据实际绿布范围在虚拟环境中搭建同等比例绿(蓝)布,在虚拟环境中计算实际绿(蓝)布范围;据此实时渲染出虚拟环境中的动态绿(蓝)布范围遮罩,并以此作为通道储存在内存中;再获取拍摄抠像后画面,针对实际抠像后的素材再减去内存中实时计算的绿(蓝)布范围得到一个去除绿(蓝)布范围以外的图像数据;最后输出去除绿(蓝)布范围之外的图像。解决了拍摄画面出

抠像模型训练和图像抠像方法、装置和系统及存储介质.pdf
本发明实施例提供一种抠像模型训练方法、装置和系统以及图像抠像方法、装置和系统以及存储介质。抠像模型训练方法包括:获取样本图像和对应的标注数据,标注数据用于指示样本图像中目标对象所在位置;根据标注数据确定样本图像中目标对象的对象边缘区域;根据为样本图像中的对象边缘区域以及样本图像中的其他区域分别分配的采样权重对样本图像中的像素进行采样;以及根据采样到的像素计算用于训练抠像模型的损失函数,利用损失函数、样本图像和标注数据对抠像模型进行训练。该抠像模型训练方法有利于提升抠像模型对对象边缘的预测精度,能够大大提升
人体抠像的方法和装置.pdf
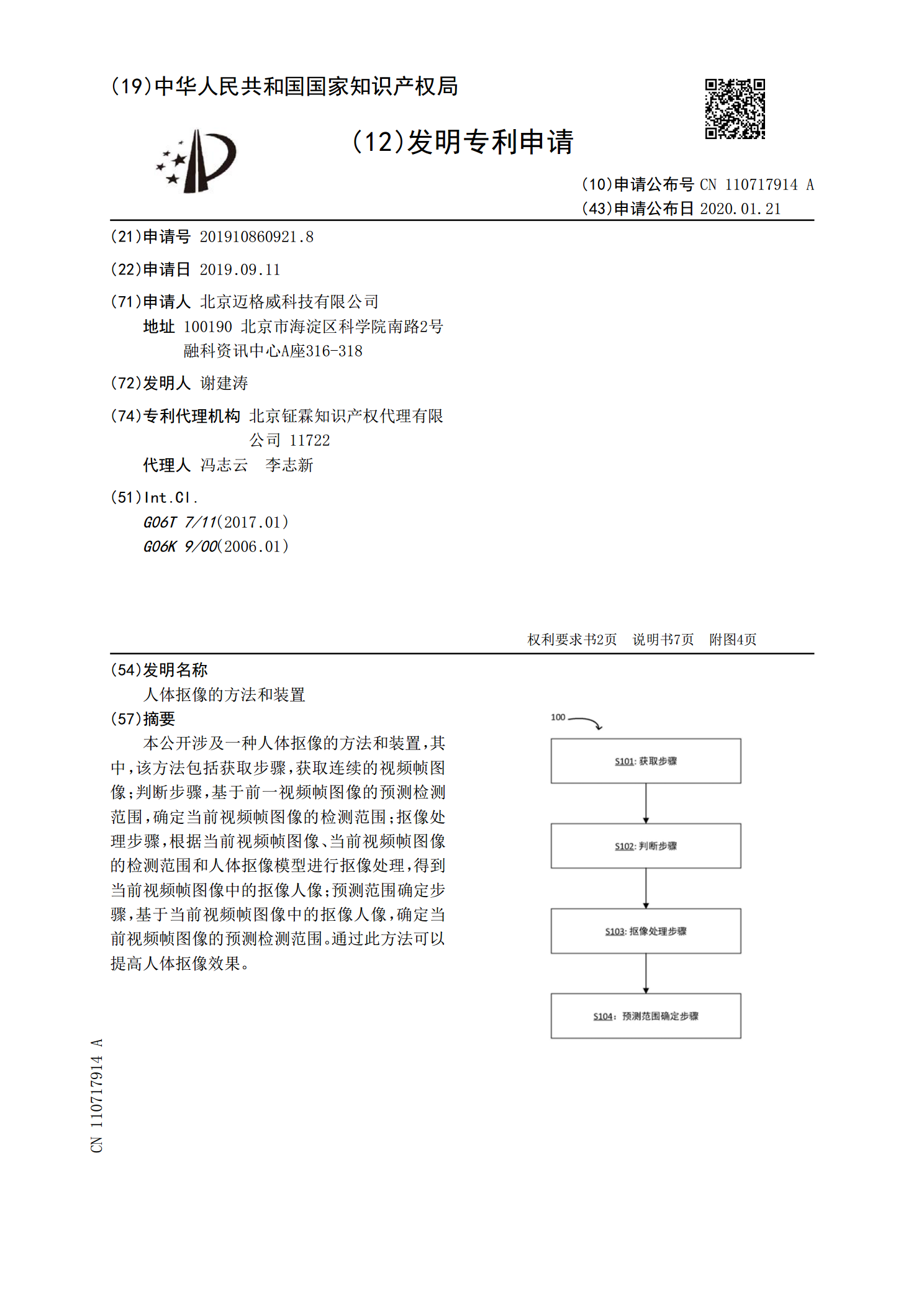
本公开涉及一种人体抠像的方法和装置,其中,该方法包括获取步骤,获取连续的视频帧图像;判断步骤,基于前一视频帧图像的预测检测范围,确定当前视频帧图像的检测范围;抠像处理步骤,根据当前视频帧图像、当前视频帧图像的检测范围和人体抠像模型进行抠像处理,得到当前视频帧图像中的抠像人像;预测范围确定步骤,基于当前视频帧图像中的抠像人像,确定当前视频帧图像的预测检测范围。通过此方法可以提高人体抠像效果。
视频自动抠像方法及系统.pdf
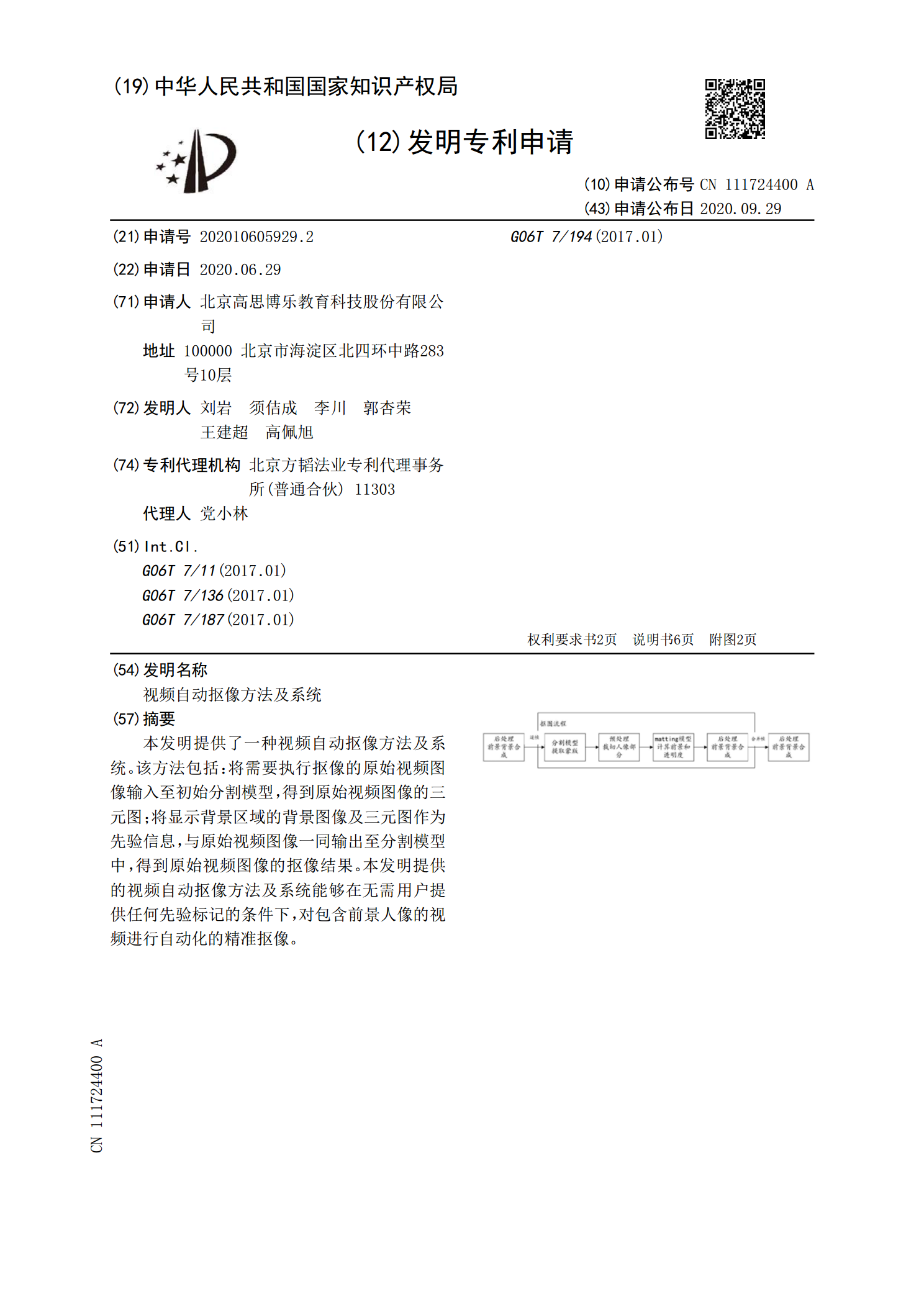
本发明提供了一种视频自动抠像方法及系统。该方法包括:将需要执行抠像的原始视频图像输入至初始分割模型,得到原始视频图像的三元图;将显示背景区域的背景图像及三元图作为先验信息,与原始视频图像一同输出至分割模型中,得到原始视频图像的抠像结果。本发明提供的视频自动抠像方法及系统能够在无需用户提供任何先验标记的条件下,对包含前景人像的视频进行自动化的精准抠像。

AE抠像教程.doc
AE抠像教程“抠像”即“键控技术”在影视制作领域是被广泛采用的技术手段,实现方法也普遍被人们知道一些――当您看到演员在绿色或蓝色构成的背景前表演,但这些背景在最终的影片中是见不到的,就是运用了键控技术,用其它背景画面替换了蓝色或绿色,这就是“抠像”。当然,“抠像”并不是只能用蓝或绿,只要是单一的、比较纯的颜色就可以,但是与演员的服装、皮肤的颜色反差越大越好,这样键控比较容易实现。如果是实时的“抠像”都需要视频切换台或者支持实时色键的视频捕获卡。但价格比较昂贵,个人基本上是承受不了的。在AfterEffec