
一种基于深度学习的本征图像分解方法及装置.pdf

安双****文章


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度学习的本征图像分解方法及装置.pdf
本发明公开一种基于深度学习的本征图像分解方法及装置,其中该方法包括在若干3D模型中选取3D模型加载入基于物理的渲染器,随机设置光照,任取视角渲染图片,并通过渲染器获取对应的反射成分和光照成分,以此重复操作,生成大批量的有标注本征图分解的数据集;利用所生成的数据集将全卷积神经网络训练成本征图分解网络;对本征图分解网络进行应用,由预测输出的分解结果,得到期望输出的分解目标。本发明提出的本征图分解方法允许通过图形渲染的方式获取大批量有标注数据集,通过训练深度神经网络,获取鲁棒性良好的分解模型;通过应用损失网络,

一种基于偏微分方程学习的本征图像分解方法.pdf
本发明提供一种基于偏微分方程学习的本征图像分解方法,本发明在处理图像本征成分估计上不依赖于确定的先验约束,且采用数据驱动的方式构建偏微分方程;利用共轭梯度法来决定搜索方向,相对于最速下降法和牛顿法,该方法将共轭性与最速下降法相结合;利用已知点处的梯度构造一组共轭方向,并沿着这组方向进行搜索,求出目标函数的极小点,来确定最佳的搜索方向;该方法可有效实现不同光照条件的图像进行本征分解得到该图像的反射成分和阴影成分。

一种基于肤色先验的人脸本征图像分解方法.pdf
本发明公开了一种基于肤色先验的人脸本征图像分解方法,可以从单张人脸照片中提取人脸反射率本征图。该方法分为三个步骤:在预处理阶段,对人脸进行三维重建同时提取人脸特征点,然后进行人脸区域划分;在高光分离阶段,利用光强比定位并剔除高光;本征分离阶段,结合平滑性等先验和人脸肤色先验用优化的方法求解反射本征图。该方法需要的输入仅为单张图片,生成的反射率本征图能够较好地保留肤色信息。

一种基于深度学习和概率图模型的本征分解方法的研究.docx
一种基于深度学习和概率图模型的本征分解方法的研究一种基于深度学习和概率图模型的本征分解方法的研究摘要:本文提出了一种基于深度学习和概率图模型的本征分解方法,利用深度学习模型提取数据的抽象特征表示,然后结合概率图模型对特征进行建模和分析,从而实现对数据的本征分解。通过实验验证,在不同的数据集上,所提出的方法能够有效地进行本征分解,并得到更好的结果。该方法具有一定的泛化能力,并可以应用于多种不同的领域。关键词:深度学习、概率图模型、本征分解1.引言本征分解是一种常用的数据分析方法,可以用于对数据进行降维、去噪
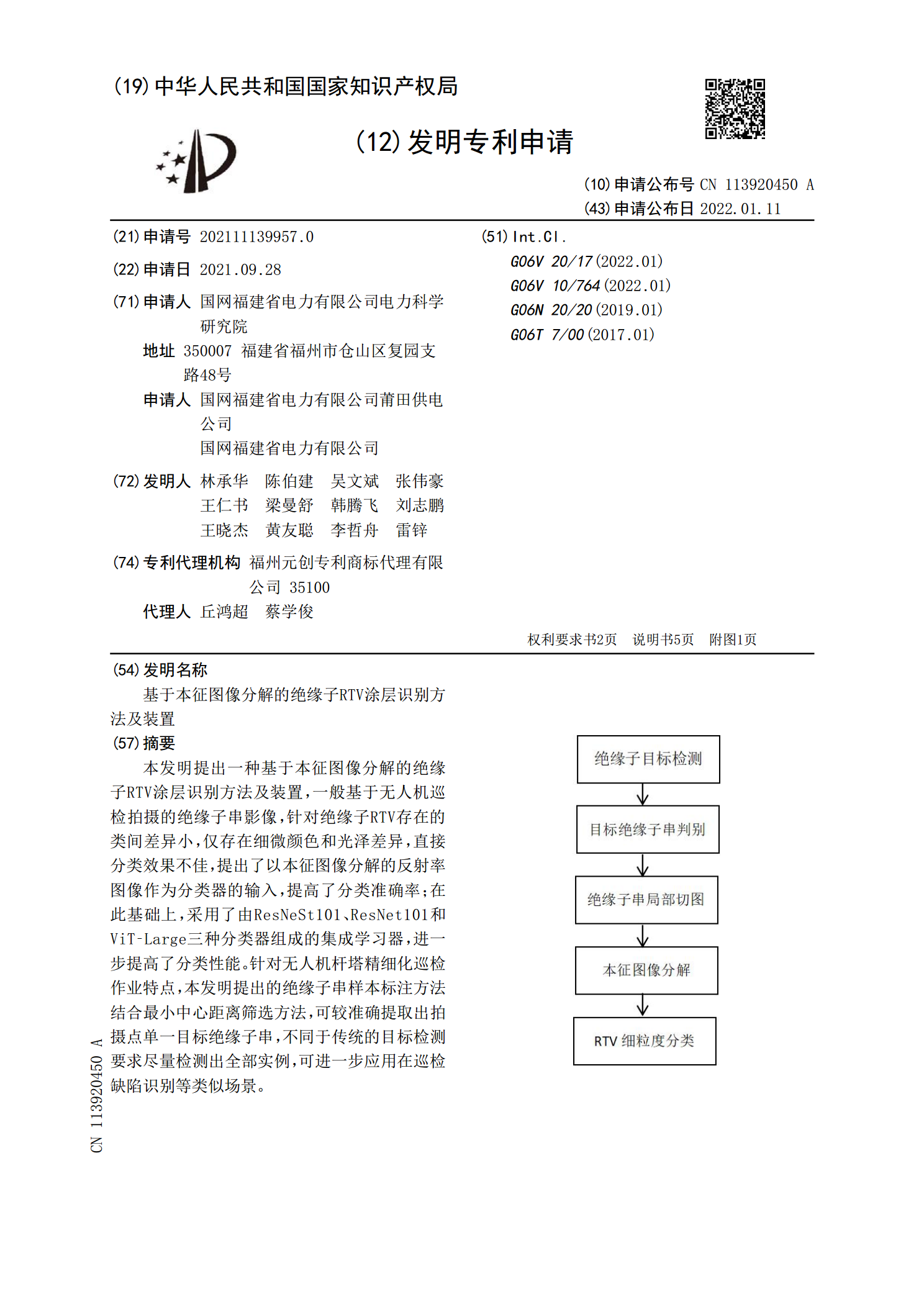
基于本征图像分解的绝缘子RTV涂层识别方法及装置.pdf
本发明提出一种基于本征图像分解的绝缘子RTV涂层识别方法及装置,一般基于无人机巡检拍摄的绝缘子串影像,针对绝缘子RTV存在的类间差异小,仅存在细微颜色和光泽差异,直接分类效果不佳,提出了以本征图像分解的反射率图像作为分类器的输入,提高了分类准确率;在此基础上,采用了由ResNeSt101、ResNet101和ViT‑Large三种分类器组成的集成学习器,进一步提高了分类性能。针对无人机杆塔精细化巡检作业特点,本发明提出的绝缘子串样本标注方法结合最小中心距离筛选方法,可较准确提取出拍摄点单一目标绝缘子串,不