
一种融合几何信息的视觉SLAM回环检测方法.pdf

Ja****23


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种融合几何信息的视觉SLAM回环检测方法.pdf
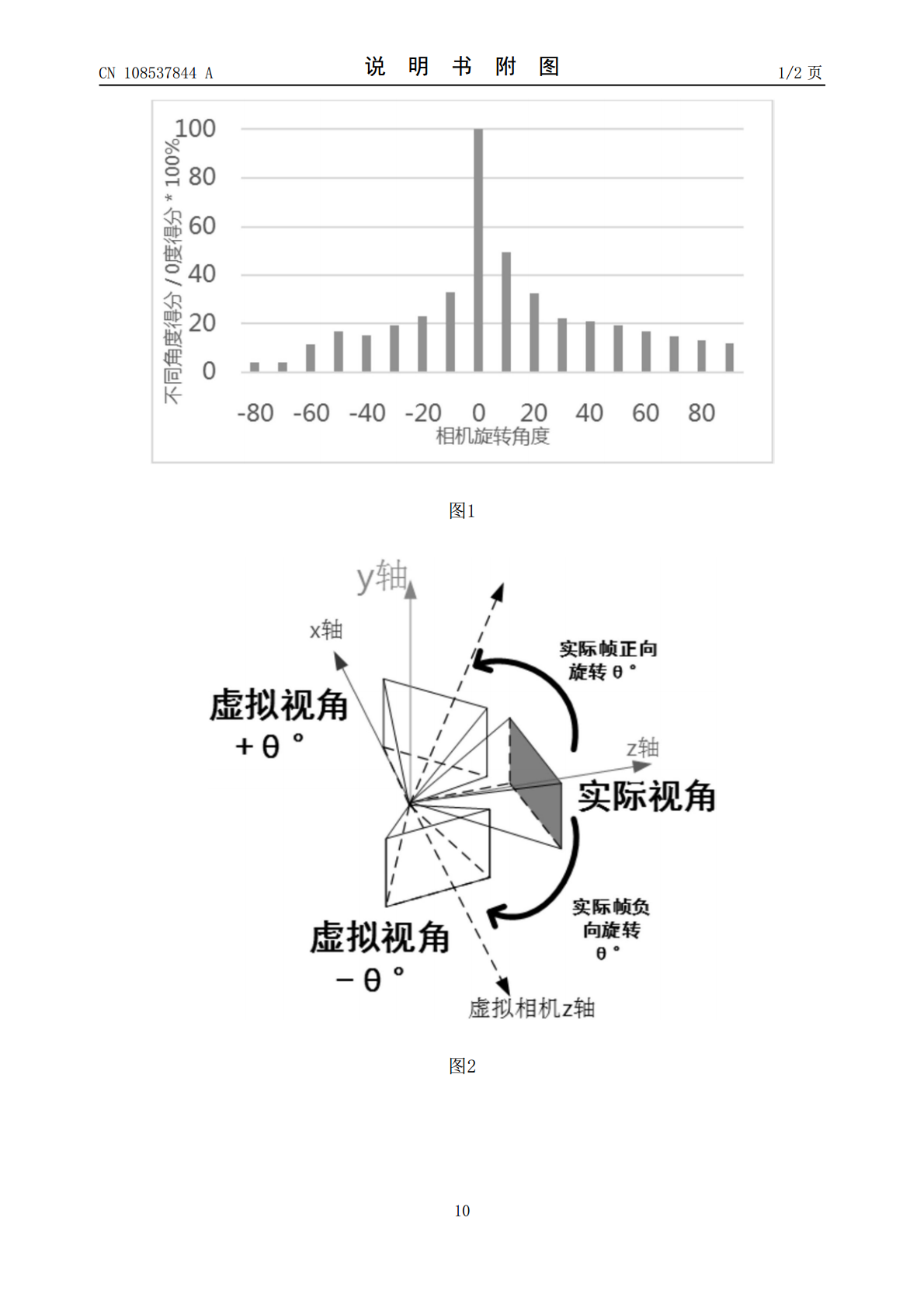
本发明公开了一种融合几何信息的视觉SLAM回环检测方法,包括S1:获取真实关键帧;S2:确定虚拟相机的视角变化,并计算虚拟相机在SLAM系统中的位姿;S3:根据真实关键帧重构出SLAM系统中的三维点云;S4:根据针孔相机模型和投影几何,计算出三维点云每个三维点在虚拟关键帧中的像素坐标;S5:渲染出虚拟相机的虚拟关键帧;S6:提取真实关键帧和虚拟关键帧的特征描述子;S7:计算真实关键帧和虚拟关键帧的BoV并加入数据库中,在进行回环检测时,搜索数据库中所有真实关键帧和虚拟关键帧,以获取回环检测信息。本发明的融

一种融合语义地图与回环检测的视觉SLAM方法.pptx
汇报人:/目录01语义信息提取地图构建方法语义信息融合地图优化02回环检测算法特征匹配相似度计算回环检测优化03系统框架关键帧选取跟踪与定位建图与优化04实验设置实验结果结果分析方法优势与不足05在机器人领域的应用在自动驾驶领域的应用在虚拟现实领域的应用未来研究方向与挑战汇报人:

视觉SLAM中基于点线特征融合的图像匹配与回环检测方法研究.docx
视觉SLAM中基于点线特征融合的图像匹配与回环检测方法研究视觉SLAM(SimultaneousLocalizationandMapping)是一种通过摄像头观测到的图像信息来实现机器人定位和地图构建的技术。在视觉SLAM中,图像匹配和回环检测是两个关键的问题,本文将重点研究基于点线特征融合的方法。一、引言随着计算机视觉和机器学习的发展,视觉SLAM在自主导航、增强现实和机器人领域的应用越来越广泛。在视觉SLAM中,图像匹配和回环检测是至关重要的环节,能够显著提高定位和地图构建的准确性。二、图像匹配图像匹

基于深度学习的视觉SLAM回环检测方法.docx
基于深度学习的视觉SLAM回环检测方法基于深度学习的视觉SLAM回环检测方法摘要:视觉SLAM(SimultaneousLocalizationandMapping)是一种同时实现机器人定位和环境地图构建的技术。在SLAM过程中,回环检测是一个关键的步骤,用于识别机器人是否经过相同的地点。传统的视觉SLAM回环检测方法通常使用特征提取和匹配的方式,但在复杂的场景中容易受到光照变化、遮挡和动态物体的干扰。为了解决这个问题,本文提出了一种基于深度学习的视觉SLAM回环检测方法,利用深度神经网络来提取更稳定、鲁

一种基于多相机全景视觉的SLAM全向回环校正方法.pdf
本发明提出一种基于多相机全景视觉的SLAM全向回环校正方法,该方法利用多相机全景视觉系统提供的全景图像信息,对运动载体周围的环境进行全方位的感知,解决现有SLAM方法所用回环校正算法无法在传感器朝向差异较为明显时检测出相同场景的问题;通过冗余的视野范围,可以保证环境信息感知时没有盲区;通过去除匹配特征点中的重复信息来减弱冗余视野范围对回环检测的影响,可以在传感器位置相同时准确地检测出运动轨迹中的回环;在回环校正过程中通过特征点、地图点的全局匹配,使回环校正算法在传感器朝向差异较大的情况下也能够计算两个关键