
一种基于激光点云数据的3D全景模型建模方法.pdf

新月****姐a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于激光点云数据的3D全景模型建模方法.pdf
本发明公开了一种基于激光点云数据的3D全景模型建模方法,包括如下步骤:S100、准备全景数据和激光点云数据;S200、统一全景数据中的位置坐标和激光点云坐标,并进行激光点云分组、抽稀、坐标变换以及激光点云节点坐标的二次剔除;S300、进行处理后的激光点云节点坐标的三角网构网以及三角网坐标点的反向变换,并形成全景模型;S400、对全景模型中的每个全景节点进行渲染处理和全景数据操作,同时加载地物三角网模型;S500、进行激光点云构造的地物三角网模型的提取与操作,采用全景模型作为背景,以很低的成本实现了大场景效
一种基于点云数据的3D扫描逆向建模方法.pdf
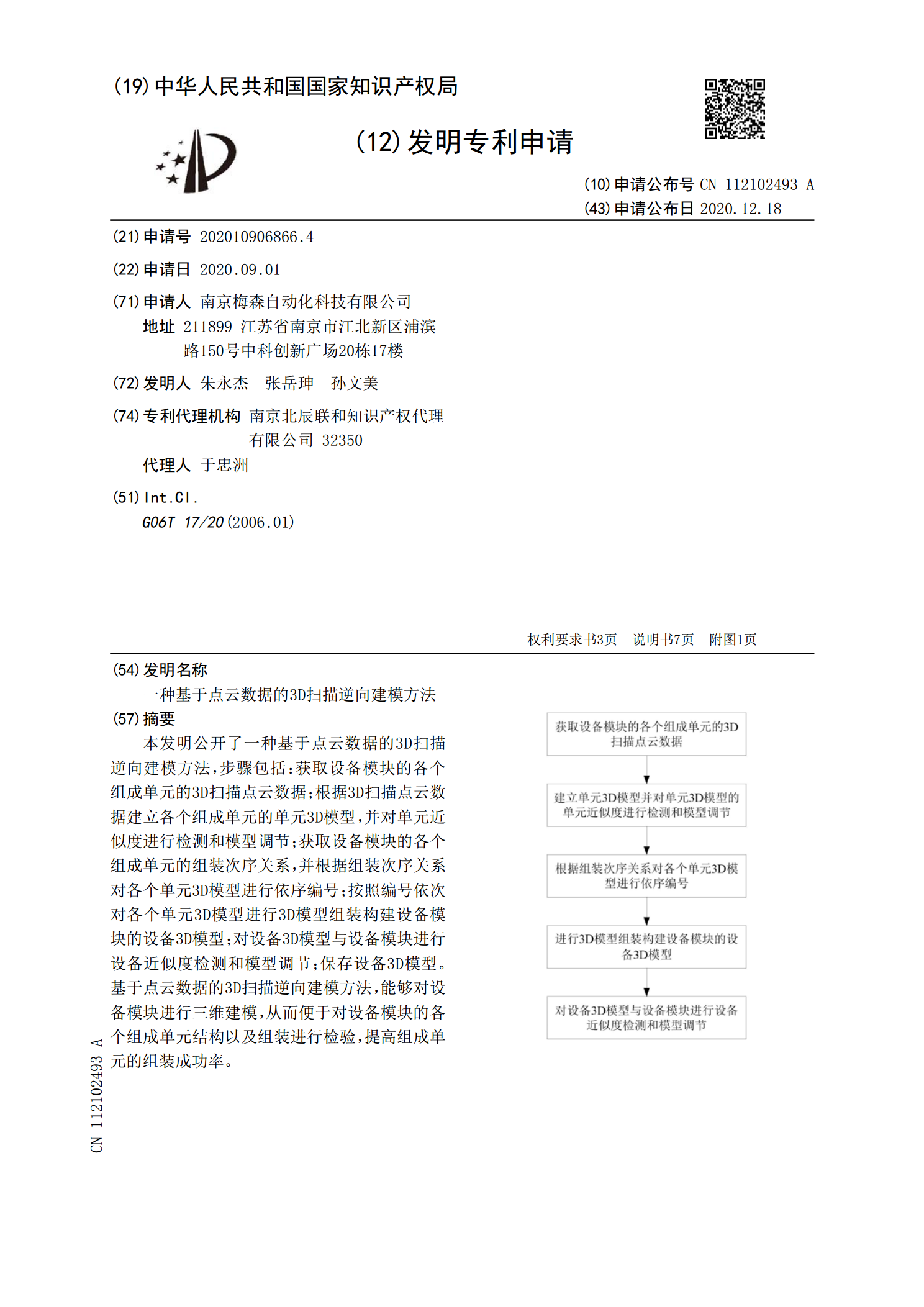
本发明公开了一种基于点云数据的3D扫描逆向建模方法,步骤包括:获取设备模块的各个组成单元的3D扫描点云数据;根据3D扫描点云数据建立各个组成单元的单元3D模型,并对单元近似度进行检测和模型调节;获取设备模块的各个组成单元的组装次序关系,并根据组装次序关系对各个单元3D模型进行依序编号;按照编号依次对各个单元3D模型进行3D模型组装构建设备模块的设备3D模型;对设备3D模型与设备模块进行设备近似度检测和模型调节;保存设备3D模型。基于点云数据的3D扫描逆向建模方法,能够对设备模块进行三维建模,从而便于对设备

一种基于激光点云数据的地表三维模型构建方法.pdf
本发明公开了一种基于激光点云数据的地表三维模型构建方法,包括构建构建地表DEM和DOM并将二者融合,形成地表三维模型。DEM构建方法包括:获取点云数据;剔除噪点和过滤植被信息;压缩;每个DEM格网内保留距中心最近的数据点;分块处理;构建地表DEM;将地表DEM保存为GeoTIFF栅格文件。DOM构建方法包括:将激光点云数据的三维坐标和色彩值对应;地表DOM每个网格内最多保留一个点提取颜色;获取激光点云数据的凹包轮廓线,位于轮廓线内的网格填入颜色;将地表DOM保存为GeoTIFF栅格文件。本发明以高密度、真

车载全景影像与激光点云数据配准方法研究.docx
车载全景影像与激光点云数据配准方法研究随着车载全景影像和激光点云数据的广泛应用,如何实现两种数据的精确配准成为了研究热点。本文将介绍车载全景影像和激光点云数据配准的基本原理和方法。一、车载全景影像与激光点云数据的特点车载全景影像是通过激光雷达和高清摄像头等传感器获取的场景全景影像,其具有短时间内获取大量数据、可视化效果好、信息量丰富等特点。而激光点云数据则是通过激光测距仪等设备获取目标表面上的三维坐标点云数据,其具有高精度、能够实现对目标的详细量化分析等优势。二、车载全景影像与激光点云数据配准的基本原理车
一种机载激光点云数据与车载激光点云数据融合方法.pdf
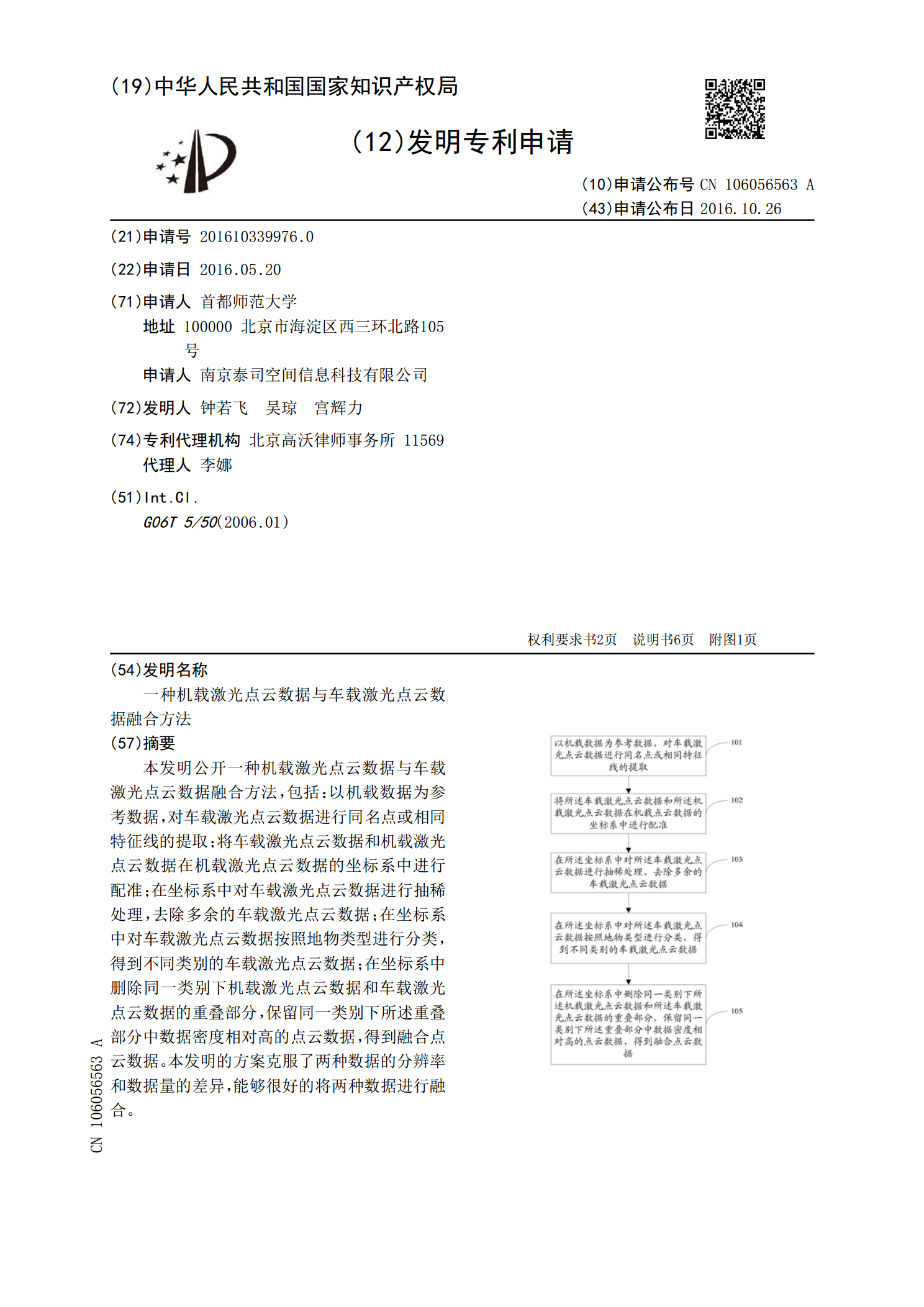
本发明公开一种机载激光点云数据与车载激光点云数据融合方法,包括:以机载数据为参考数据,对车载激光点云数据进行同名点或相同特征线的提取;将车载激光点云数据和机载激光点云数据在机载激光点云数据的坐标系中进行配准;在坐标系中对车载激光点云数据进行抽稀处理,去除多余的车载激光点云数据;在坐标系中对车载激光点云数据按照地物类型进行分类,得到不同类别的车载激光点云数据;在坐标系中删除同一类别下机载激光点云数据和车载激光点云数据的重叠部分,保留同一类别下所述重叠部分中数据密度相对高的点云数据,得到融合点云数据。本发明的