
机械臂的抓取点的获取方法及设备.pdf

是你****盟主

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械臂的抓取点的获取方法及设备.pdf
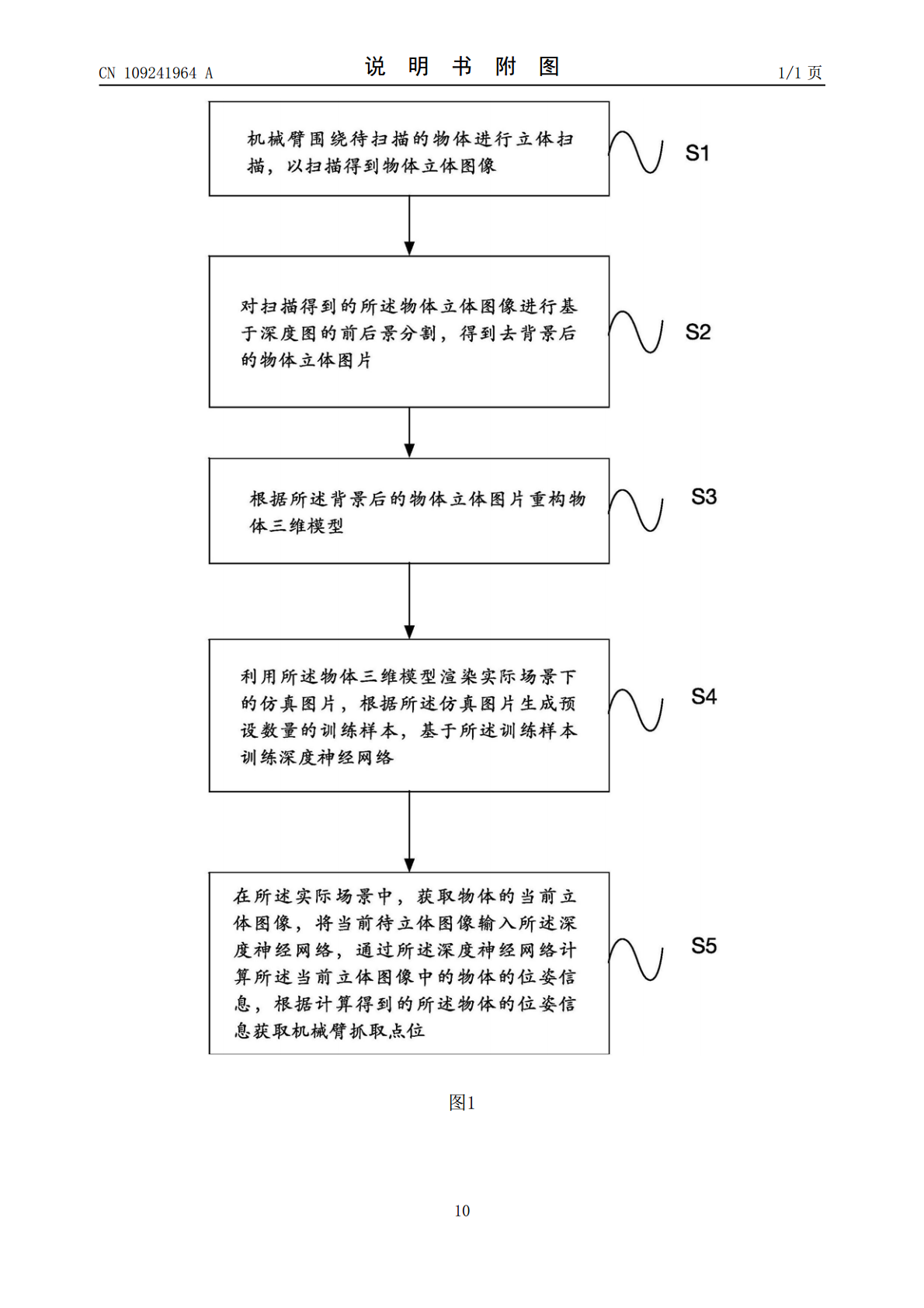
本发明的目的是提供一种机械臂的抓取点的获取方法及设备,本发明利用机械臂自身的运动,对物体进行一次扫描,即可得到物体的立体图像,构建物体三维模型,该数据采集方法高效,效果好。另外,通过物体三维模型渲染出实际场景下的仿真图片,基于仿真图训练一个深度神经网络预测物体位姿信息,该方法具有速度快,效果好,鲁棒等优点。
一种空间机械臂末端抓取机构与抓取方法.pdf
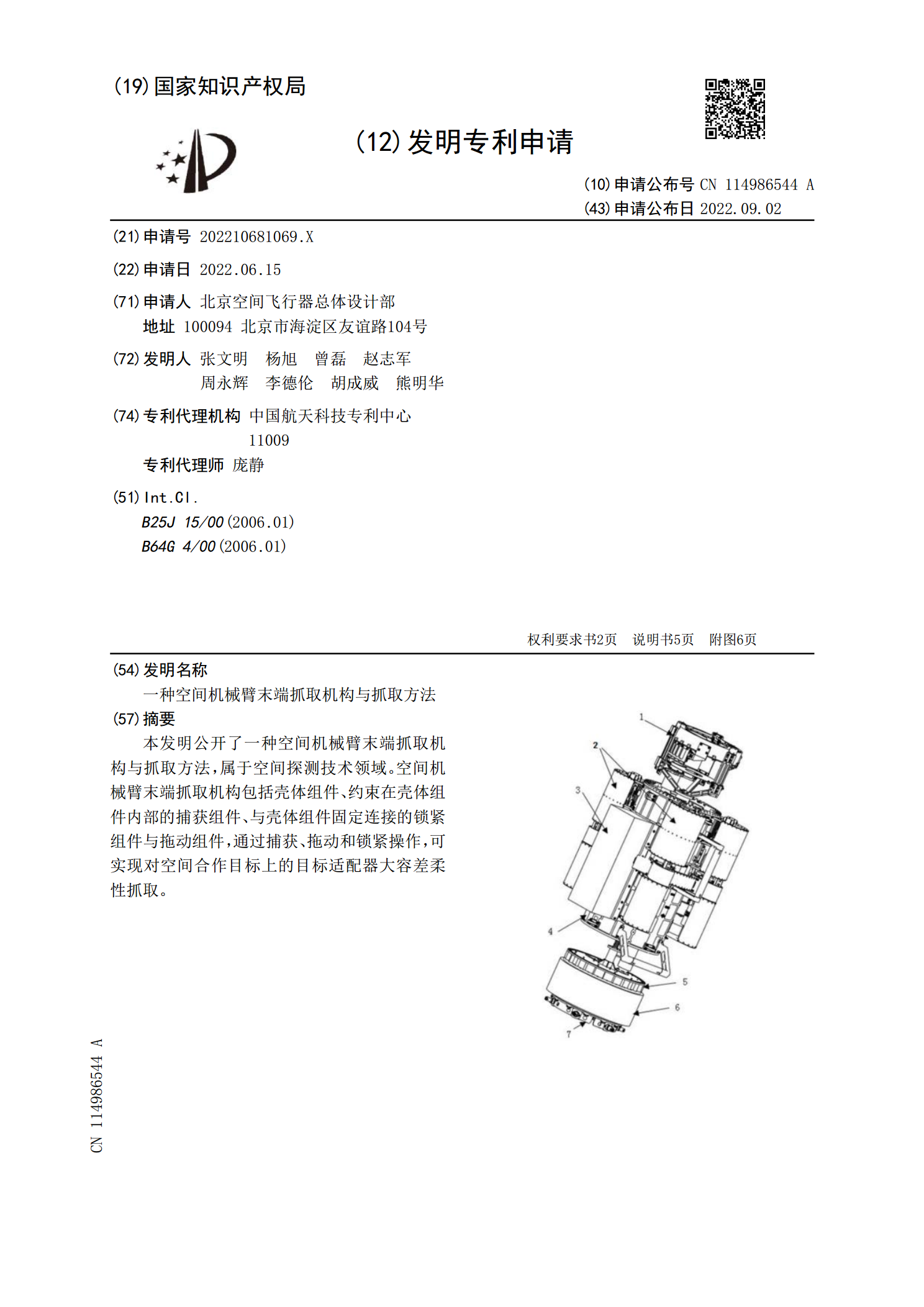
本发明公开了一种空间机械臂末端抓取机构与抓取方法,属于空间探测技术领域。空间机械臂末端抓取机构包括壳体组件、约束在壳体组件内部的捕获组件、与壳体组件固定连接的锁紧组件与拖动组件,通过捕获、拖动和锁紧操作,可实现对空间合作目标上的目标适配器大容差柔性抓取。

基于点云相机的机械臂抓取位姿生成方法研究.docx
基于点云相机的机械臂抓取位姿生成方法研究标题:基于点云相机的机械臂抓取位姿生成方法研究摘要:近年来,机械臂技术在工业自动化领域得到广泛应用。机械臂的抓取位姿生成是机械臂操作中的关键问题之一。传统的位姿生成方法依赖于已知的物体模型和准确定位,但在实际应用中往往受到目标物体形状复杂、表面纹理变化等因素的限制。本文研究了基于点云相机的机械臂抓取位姿生成方法,通过对目标物体进行三维重建和位姿检测,实现了对复杂形状和表面变化物体的准确抓取位姿生成,并进行了相关实验验证。关键词:机械臂;抓取位姿生成;点云相机;三维重
基于语义激光交互的机械臂抓取方法.pdf
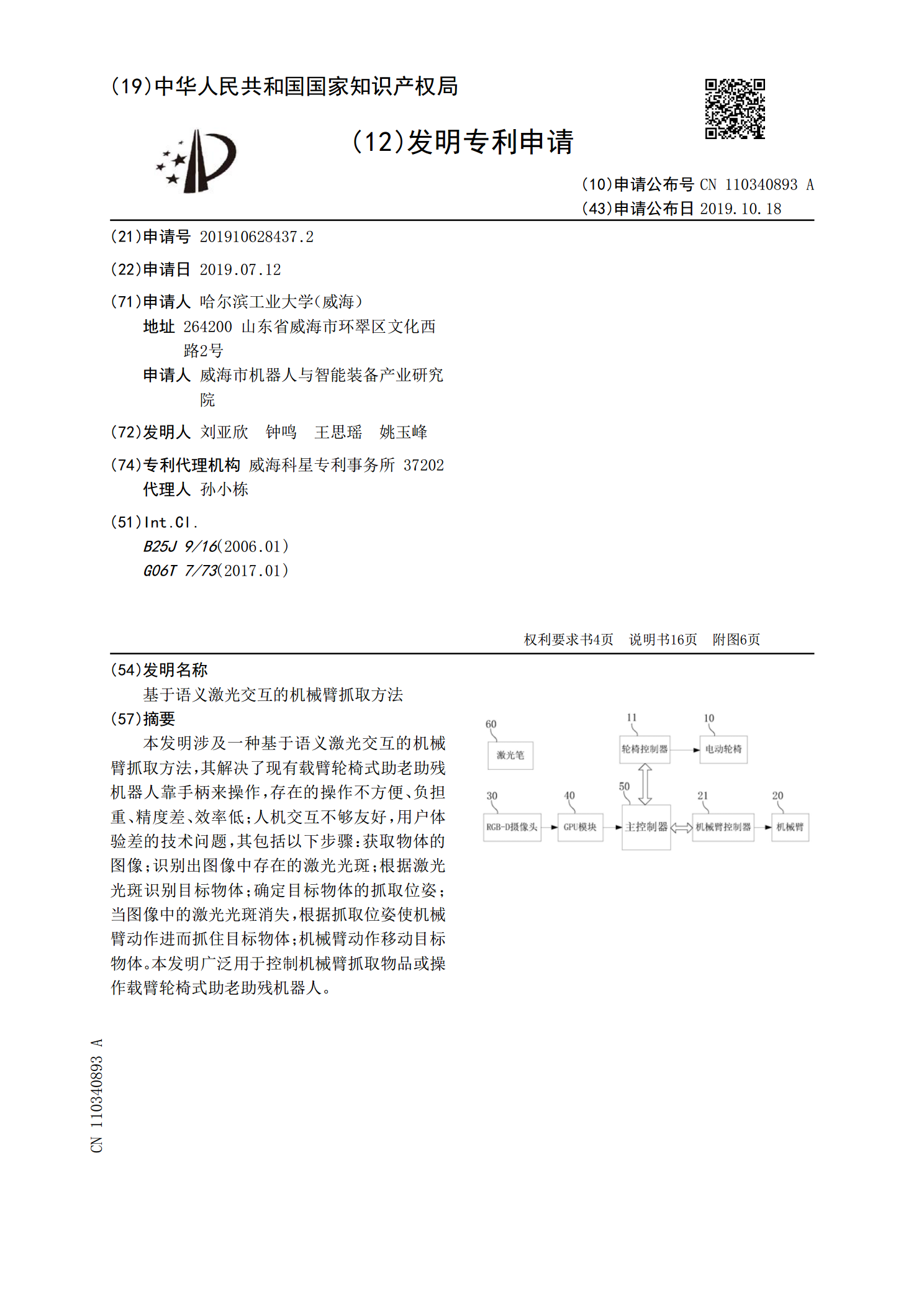
本发明涉及一种基于语义激光交互的机械臂抓取方法,其解决了现有载臂轮椅式助老助残机器人靠手柄来操作,存在的操作不方便、负担重、精度差、效率低;人机交互不够友好,用户体验差的技术问题,其包括以下步骤:获取物体的图像;识别出图像中存在的激光光斑;根据激光光斑识别目标物体;确定目标物体的抓取位姿;当图像中的激光光斑消失,根据抓取位姿使机械臂动作进而抓住目标物体;机械臂动作移动目标物体。本发明广泛用于控制机械臂抓取物品或操作载臂轮椅式助老助残机器人。
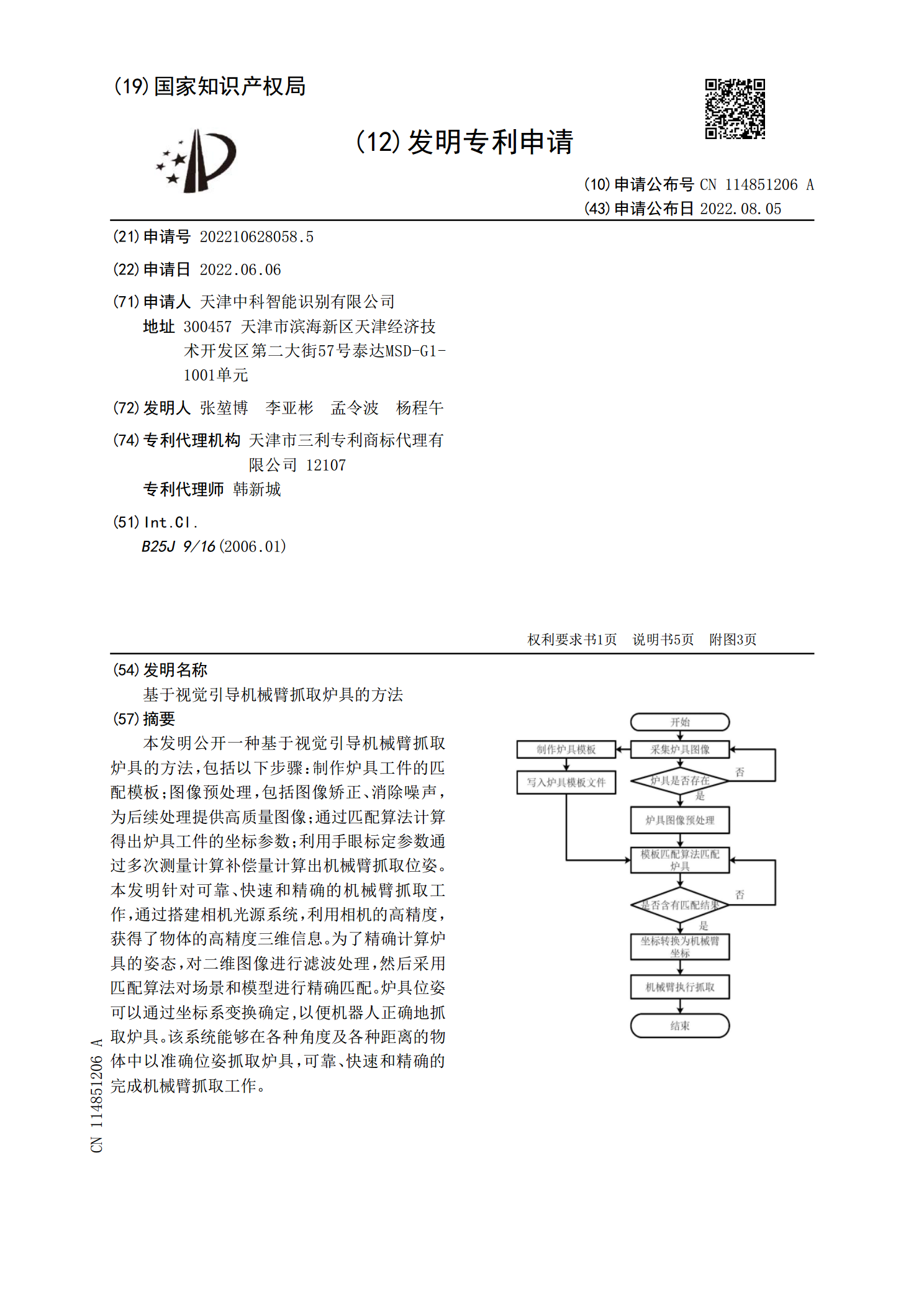
基于视觉引导机械臂抓取炉具的方法.pdf
本发明公开一种基于视觉引导机械臂抓取炉具的方法,包括以下步骤:制作炉具工件的匹配模板;图像预处理,包括图像矫正、消除噪声,为后续处理提供高质量图像;通过匹配算法计算得出炉具工件的坐标参数;利用手眼标定参数通过多次测量计算补偿量计算出机械臂抓取位姿。本发明针对可靠、快速和精确的机械臂抓取工作,通过搭建相机光源系统,利用相机的高精度,获得了物体的高精度三维信息。为了精确计算炉具的姿态,对二维图像进行滤波处理,然后采用匹配算法对场景和模型进行精确匹配。炉具位姿可以通过坐标系变换确定,以便机器人正确地抓取炉具。该