
一种海量点云数据的处理方法.pdf

一吃****福乾

1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种海量点云数据的处理方法.pdf
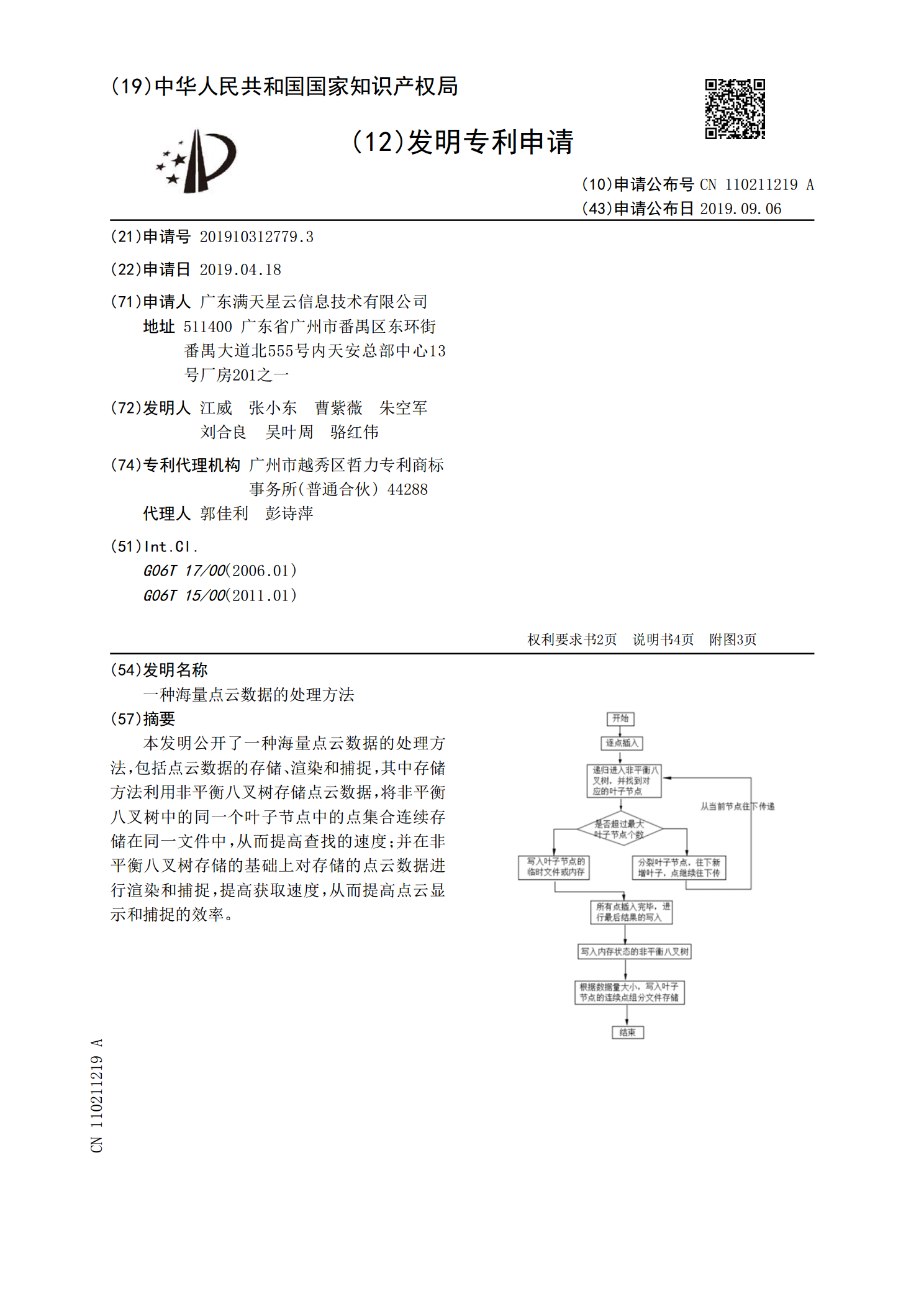
本发明公开了一种海量点云数据的处理方法,包括点云数据的存储、渲染和捕捉,其中存储方法利用非平衡八叉树存储点云数据,将非平衡八叉树中的同一个叶子节点中的点集合连续存储在同一文件中,从而提高查找的速度;并在非平衡八叉树存储的基础上对存储的点云数据进行渲染和捕捉,提高获取速度,从而提高点云显示和捕捉的效率。

海量点云数据滤波处理方法研究.docx
海量点云数据滤波处理方法研究随着三维扫描技术和激光雷达技术等相继发展,海量点云数据的获取和处理已经得到了极大的发展和普及。然而,海量点云数据处理仍然存在一些困难,其中最重要的问题之一就是如何进行滤波处理。点云滤波处理是点云处理中的一个重要环节,它的目的是通过去除异常点(包括离群点、噪声点等),使得点云数据更加准确、可靠和可视化。点云滤波技术分为两大类:基于无模型和基于模型。基于无模型的点云滤波技术主要是对点云数据进行分析,从而找出其内在规律与特征,进而进行滤波。常用的基于无模型的滤波方法包括统计学滤波、距

海量点云数据的自适应处理方法、系统及设备.pdf
本申请涉及计算机技术领域,公开了一种海量点云数据的自适应处理方法及系统。该方法包括:根据点云文件中的点云数据的实际总点数和预估深度,构建所述点云数据对应的八叉树框架,遍历所述点云数据,基于所述八叉树框架的叶子节点的可用缓存状态,将点云数据插入到所述八叉树框架的对应叶子节点;并行对八叉树框架中的大叶子节点构建子八叉树,其中,所述大叶子节点是指容纳的点云数据的点个数超过了节点所允许容纳的点个数最大值的叶子节点;并行对八叉树框架及其子八叉树的非叶子节点进行聚合和抽稀,生成八叉树。本申请能够更有效地保障对海量点云

一种海量点云数据处理与可视化方法及系统.pdf
本发明涉及点云数据处理技术领域,特别是一种海量点云数据处理与可视化方法及系统,其不同之处在于,包括以下步骤:S1、获取数据:获取具有平铺特性的点云数据文件;S2、数据分块:对所述点云数据根据设定瓦片容量进行四叉树划分,得到多个块数据;S3、数据抽稀:对划分后的不同块数据进行保持地物形态的抽稀处理;S4、节点合并:将经过抽稀处理得到的块数据进行节点逆向合并;S5、对抽稀合并后的块数据建立级联关系,构建LOD细节层次模型;S6、构建索引文件:对块数据进行高效压缩,构建缓存顶级数据索引文件;S7、可视化渲染。本

一种海量点云数据多视图渲染方法.pdf
本发明提供一种海量点云数据多视图渲染方法,包括以下步骤:对原始点云数据进行多尺度自适应分块和八叉树索引构建;根据视口范围对各个视图分别筛选需要加载的八叉树,并确定八叉树加载的层次细节模型层级;层次细节模型加载线程加载层次细节模型数据,得到可供渲染的点云模型,将可供渲染的点云模型放入模型共享队列;各个视图根据自身需要加载的八叉树,从模型共享队列中查找视图范围内的可供渲染的点云模型,合并可供渲染的点云模型到场景,同时移除过期的可供渲染的点云模型;删除过期的可供渲染的点云模型。本发明可以解决对于海量点云数据进行