
一种海量点云数据处理与可视化方法及系统.pdf

小长****6淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种海量点云数据处理与可视化方法及系统.pdf
本发明涉及点云数据处理技术领域,特别是一种海量点云数据处理与可视化方法及系统,其不同之处在于,包括以下步骤:S1、获取数据:获取具有平铺特性的点云数据文件;S2、数据分块:对所述点云数据根据设定瓦片容量进行四叉树划分,得到多个块数据;S3、数据抽稀:对划分后的不同块数据进行保持地物形态的抽稀处理;S4、节点合并:将经过抽稀处理得到的块数据进行节点逆向合并;S5、对抽稀合并后的块数据建立级联关系,构建LOD细节层次模型;S6、构建索引文件:对块数据进行高效压缩,构建缓存顶级数据索引文件;S7、可视化渲染。本
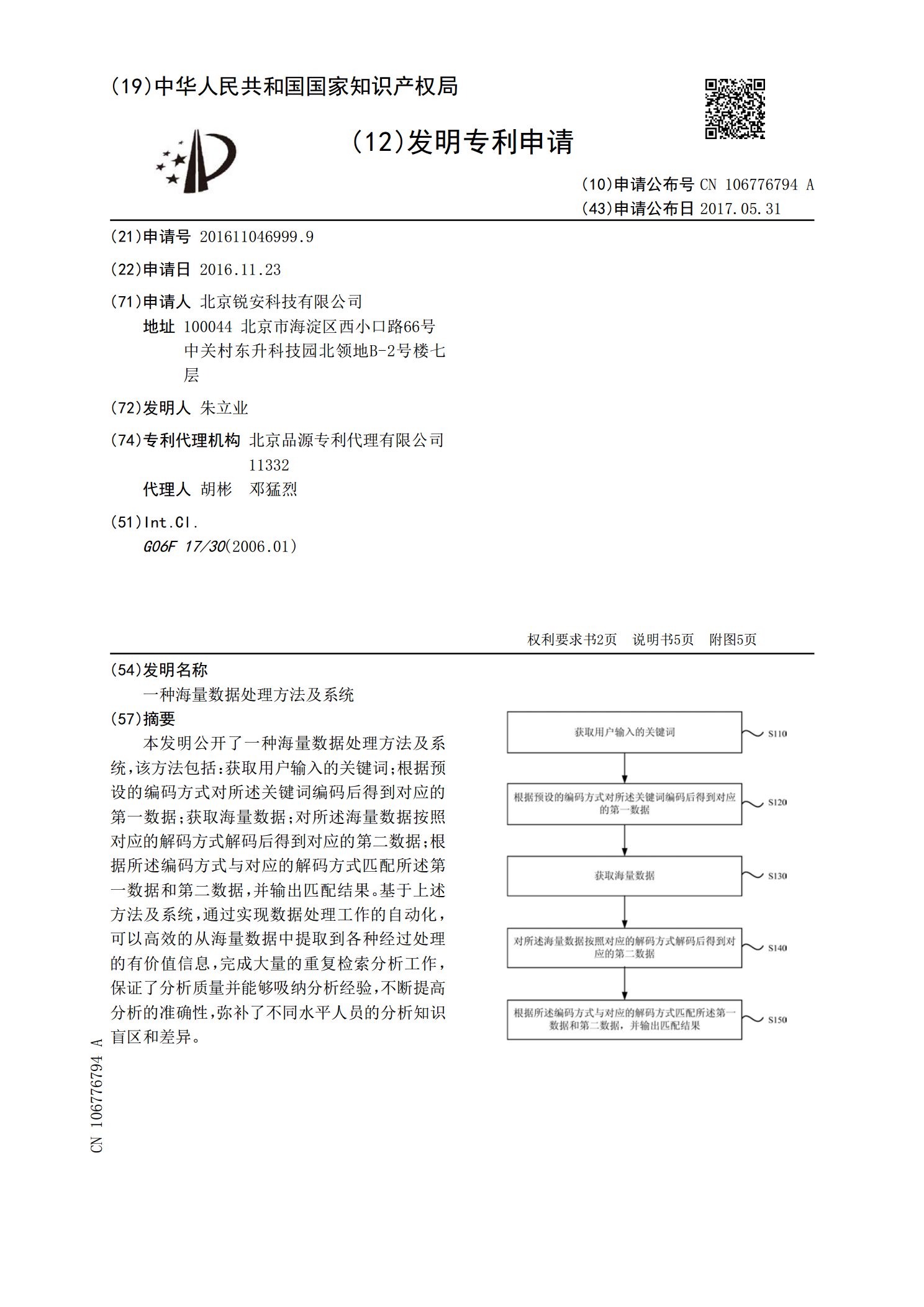
一种海量数据处理方法及系统.pdf
本发明公开了一种海量数据处理方法及系统,该方法包括:获取用户输入的关键词;根据预设的编码方式对所述关键词编码后得到对应的第一数据;获取海量数据;对所述海量数据按照对应的解码方式解码后得到对应的第二数据;根据所述编码方式与对应的解码方式匹配所述第一数据和第二数据,并输出匹配结果。基于上述方法及系统,通过实现数据处理工作的自动化,可以高效的从海量数据中提取到各种经过处理的有价值信息,完成大量的重复检索分析工作,保证了分析质量并能够吸纳分析经验,不断提高分析的准确性,弥补了不同水平人员的分析知识盲区和差异。
一种海量网络数据处理方法及系统.pdf
本发明公开了一种海量网络数据处理方法及系统,涉及网络数据处理技术领域,其包括接收第一个数据包,发送到对应的发送控制节点组成的发送数据节点;接收包含目的地地址的上述第一数据包,并决定目的地控制节点的发送控制节点;以及接收第一数据包,生成第二数据包和匹配策略规则的目的地控制节点。本发明的网络数据处理方法系统中节点间的协作操作性能得到了显著提高,网络设备中多节点处理的过剩执行大大减少,从而提高了海量网络数据及服务处理的效率。
一种点云数据处理方法及系统.pdf
本申请涉及一种点云数据处理方法及系统,方法包括响应于获取到的第一组点云数据和第二组点云数据,将这两组点云数据配准至同一坐标系;响应于获取到的划分指令,对第一组点云数据和第二组点云数据进行网格划分,形成多个单元方格,划分指令中包括划分网格时的参考面积值;计算每一个单元方格的重心以及计算第一组点云数据中单元方格的重心和第二组点云数据中与之对应的单元方格的重心的距离,记为变形距离,其中,第一组点云数据和第二组点云数据是基于三维激光扫描生成的,第二组点云数据的生成时间滞后于第一组点云数据的生成时间。本申请用于对三
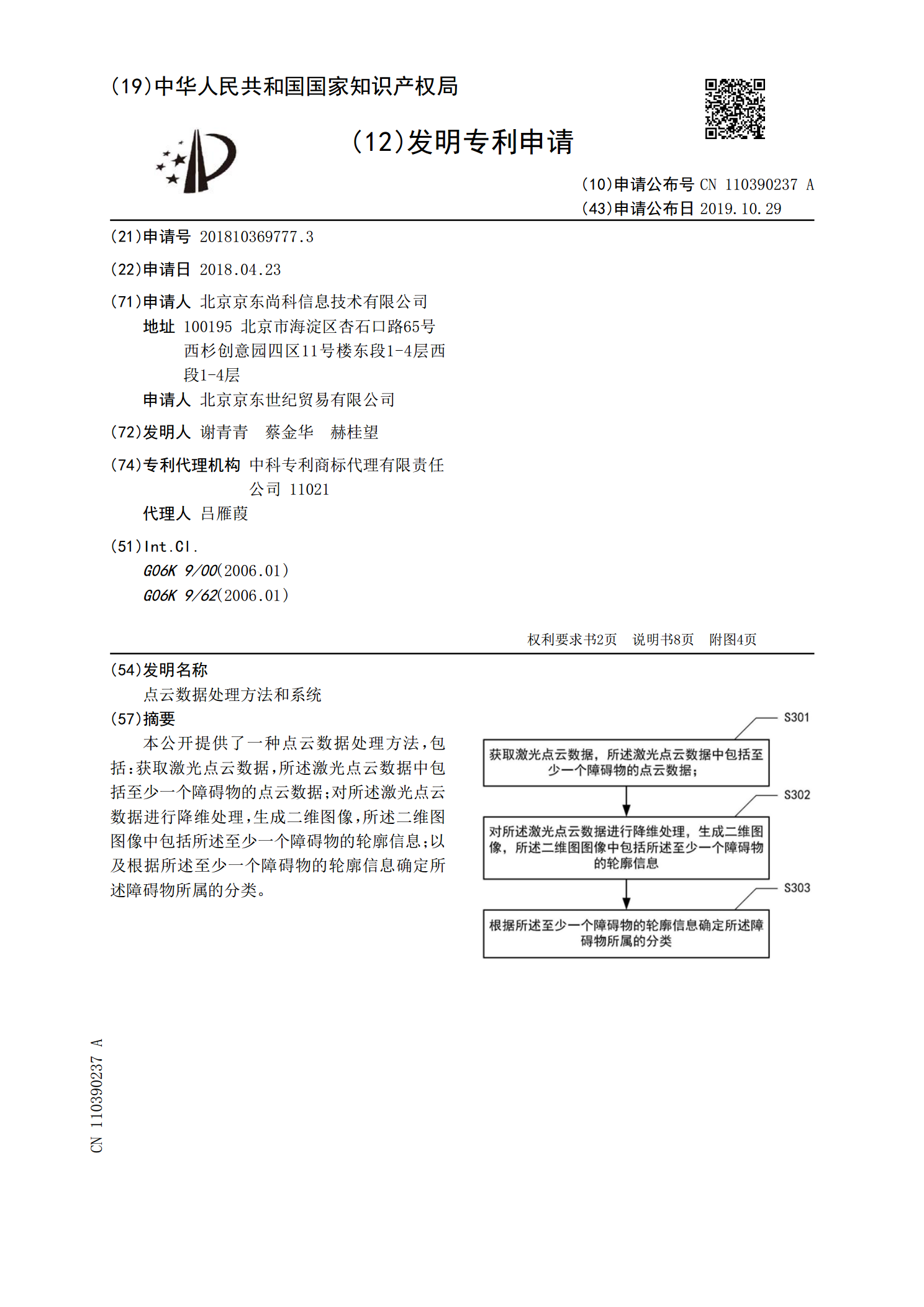
点云数据处理方法和系统.pdf
本公开提供了一种点云数据处理方法,包括:获取激光点云数据,所述激光点云数据中包括至少一个障碍物的点云数据;对所述激光点云数据进行降维处理,生成二维图像,所述二维图图像中包括所述至少一个障碍物的轮廓信息;以及根据所述至少一个障碍物的轮廓信息确定所述障碍物所属的分类。