
基于光线追踪且实时可交互的集成成像生成方法及系统.pdf

是你****深呀

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于光线追踪且实时可交互的集成成像生成方法及系统.pdf
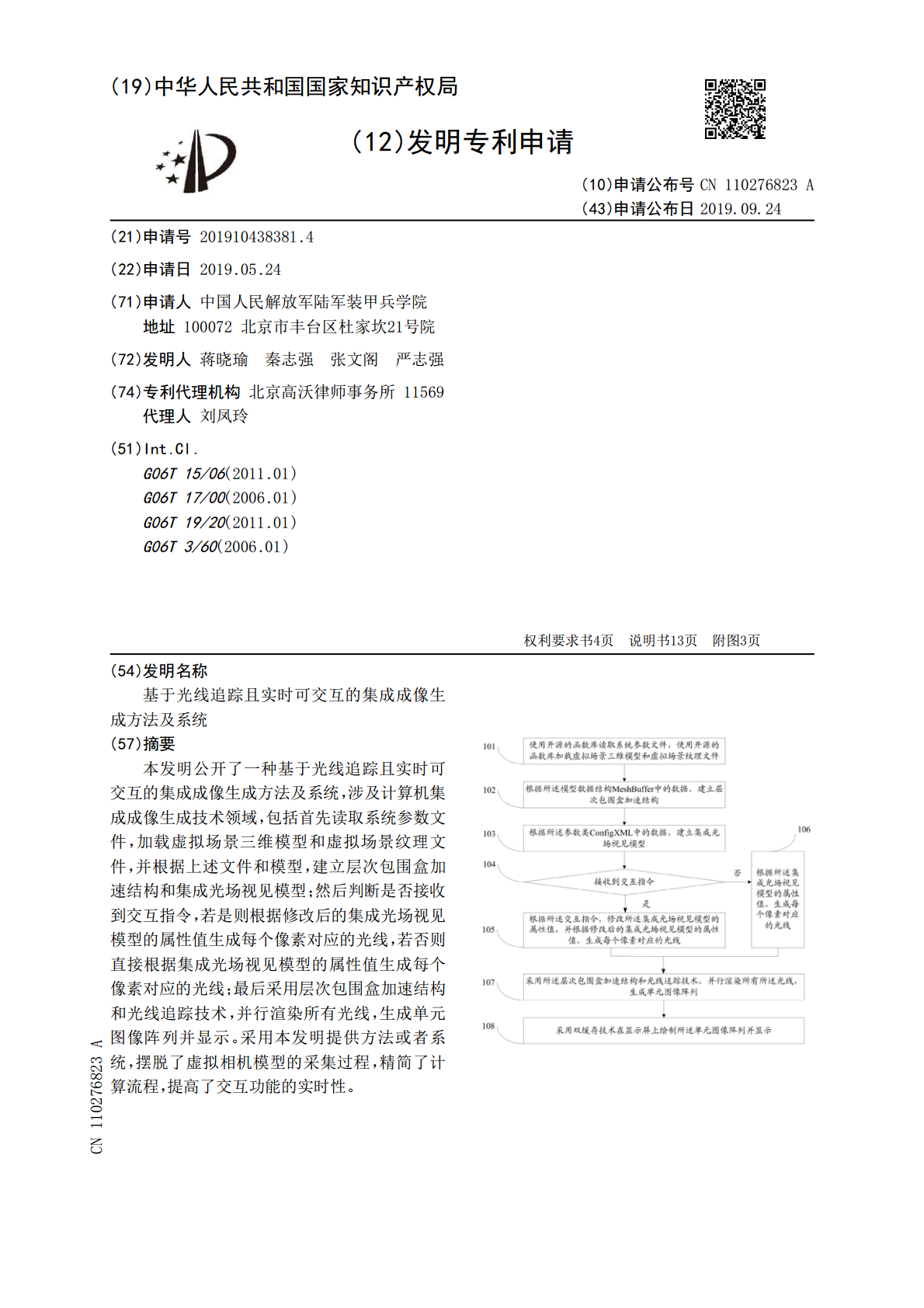
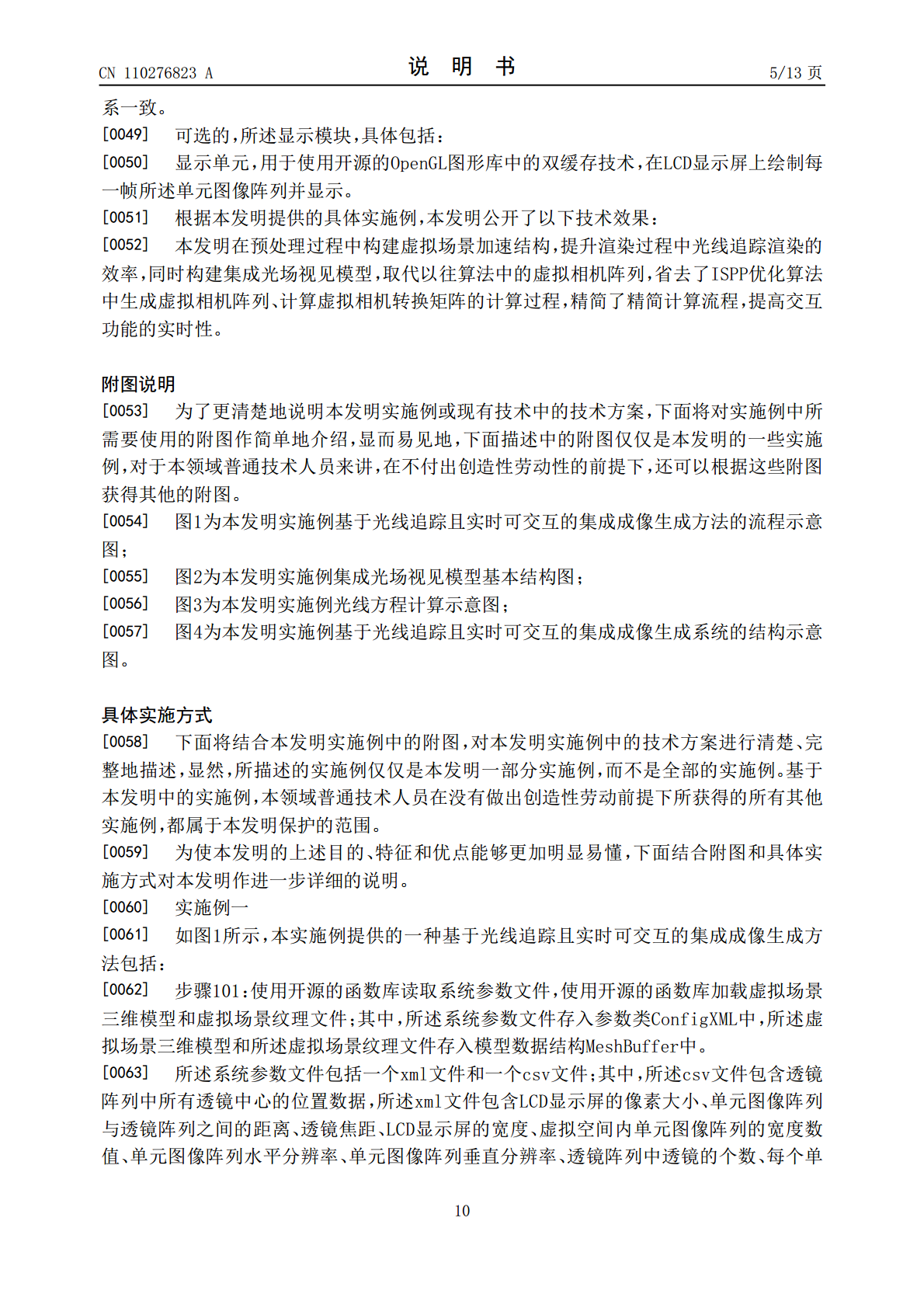
本发明公开了一种基于光线追踪且实时可交互的集成成像生成方法及系统,涉及计算机集成成像生成技术领域,包括首先读取系统参数文件,加载虚拟场景三维模型和虚拟场景纹理文件,并根据上述文件和模型,建立层次包围盒加速结构和集成光场视见模型;然后判断是否接收到交互指令,若是则根据修改后的集成光场视见模型的属性值生成每个像素对应的光线,若否则直接根据集成光场视见模型的属性值生成每个像素对应的光线;最后采用层次包围盒加速结构和光线追踪技术,并行渲染所有光线,生成单元图像阵列并显示。采用本发明提供方法或者系统,摆脱了虚拟相机
基于云的实时光线追踪.pdf
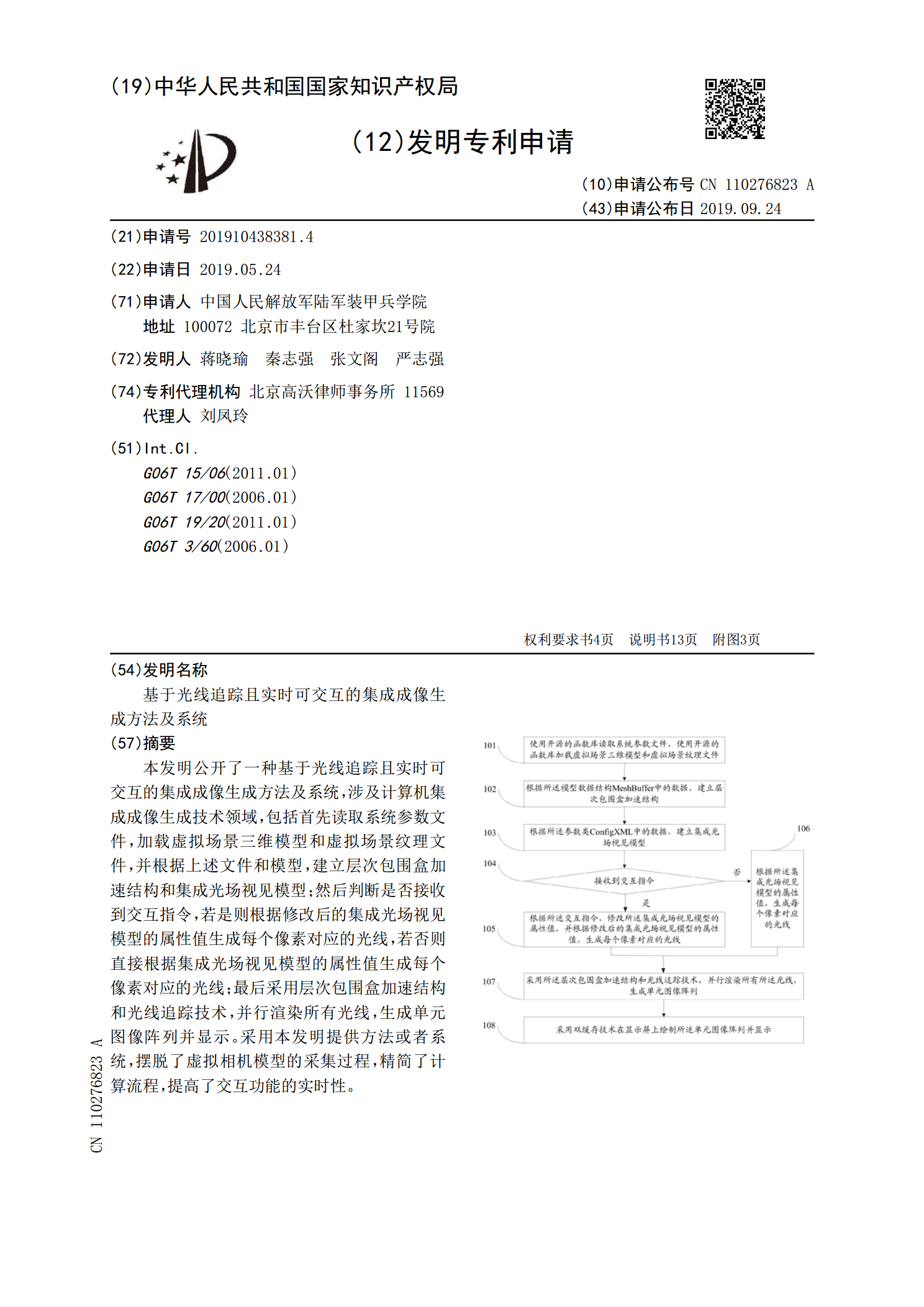
基于云的实时渲染。例如,系统的一个实施例包括:第一图形处理节点,所述第一图形处理节点用于执行图形处理操作的第一集合以渲染图形场景,图形处理操作的所述第一集合包括光线追踪无关的操作;互连或网络接口,所述互连或网络接口将所述第一图形处理节点耦合到第二图形处理节点;所述第二图形处理节点,所述第二图形处理节点用于接收所述第一图形处理节点的用户的当前视角的指示,并用于接收或构造由视角无关的光线遍历和交叉操作所生成的视角无关表面;所述第二图形处理节点用于基于所述用户的所述当前视角来响应性地执行所述视角无关表面的视角相

一种基于光线跟踪的集成成像环扇形微图像阵列生成方法.pdf
本发明提出一种基于光线跟踪的集成成像环扇形微图像阵列生成方法,所述方法利用光线跟踪渲染技术,首先筛选出每一个图像元中的环扇形区域,然后建立环扇形有效区域中每一个像素与观看视点的坐标映射关系,将观看视点作为光线的起点,观看视点与对应像素的连线方向作为光线的出射方向,向虚拟3D场景发射光线,一次渲染即可生成环扇形微图像阵列。所述方法可高效地为桌面360°环视3D显示或单边环绕观看3D显示提供数据来源。
一种基于动态场景的实时光线追踪加速结构的方法.pdf
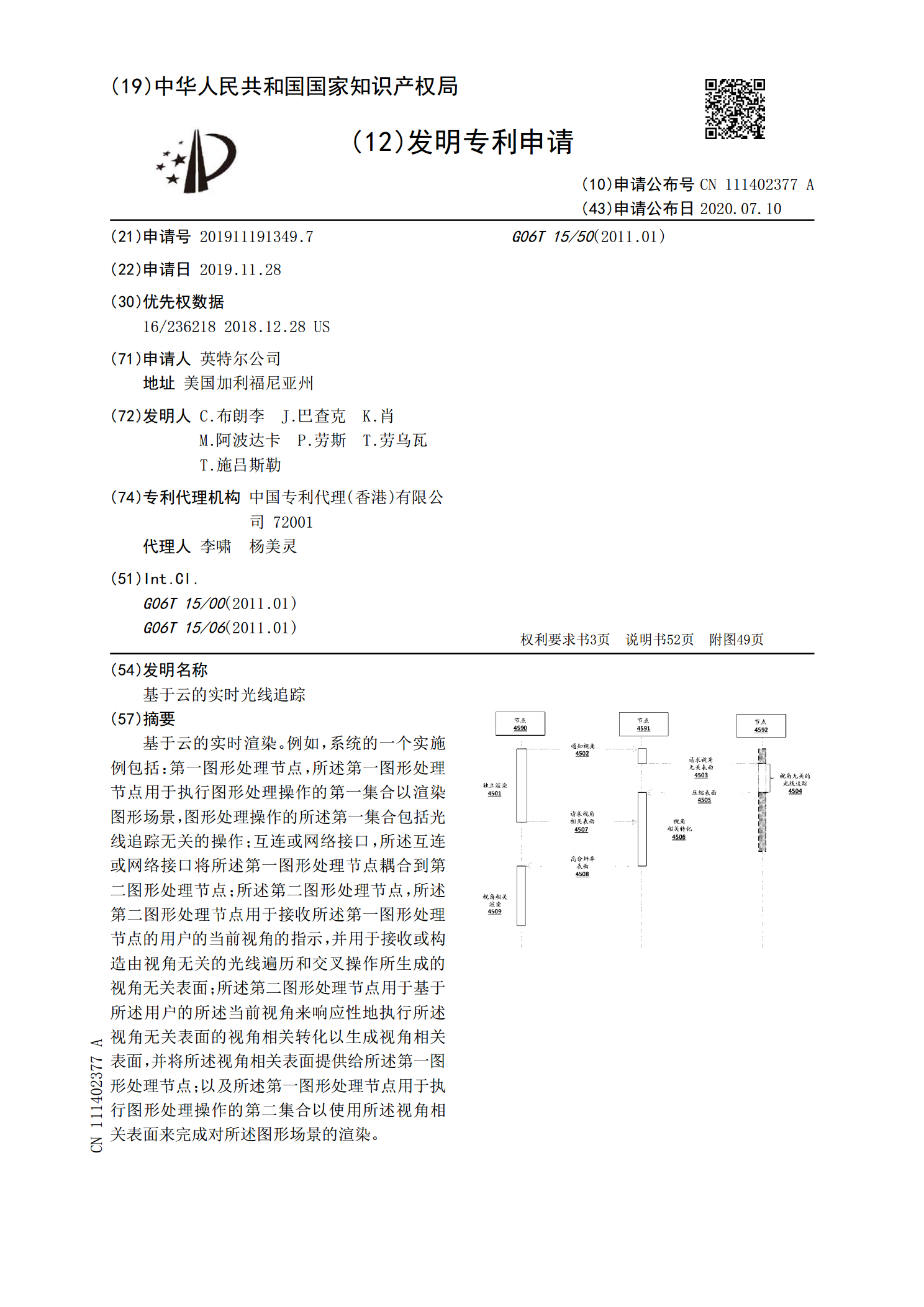
本发明提供一种基于动态场景的实时光线追踪加速结构的方法,涉及计算机图形学技术领域。该方法在图像渲染过程中首先对场景中的物体进行复杂度分类,再利用AABB包围盒以及内包围盒分别对不同复杂度的物体建立不同的包围盒,利用自顶向下和自底向上这两种构建方式相结合的方法构建BVH树,渲染出图。本发明提供的方法能减少光线求交次数,提高光线追踪算法效率,加快场景的渲染速度,非常适用于动态场景的实时渲染等方面,可将该方法应用于图像渲染优化等研究领域。
一种基于光线追踪的分布式实时神经元渲染方法和系统.pdf
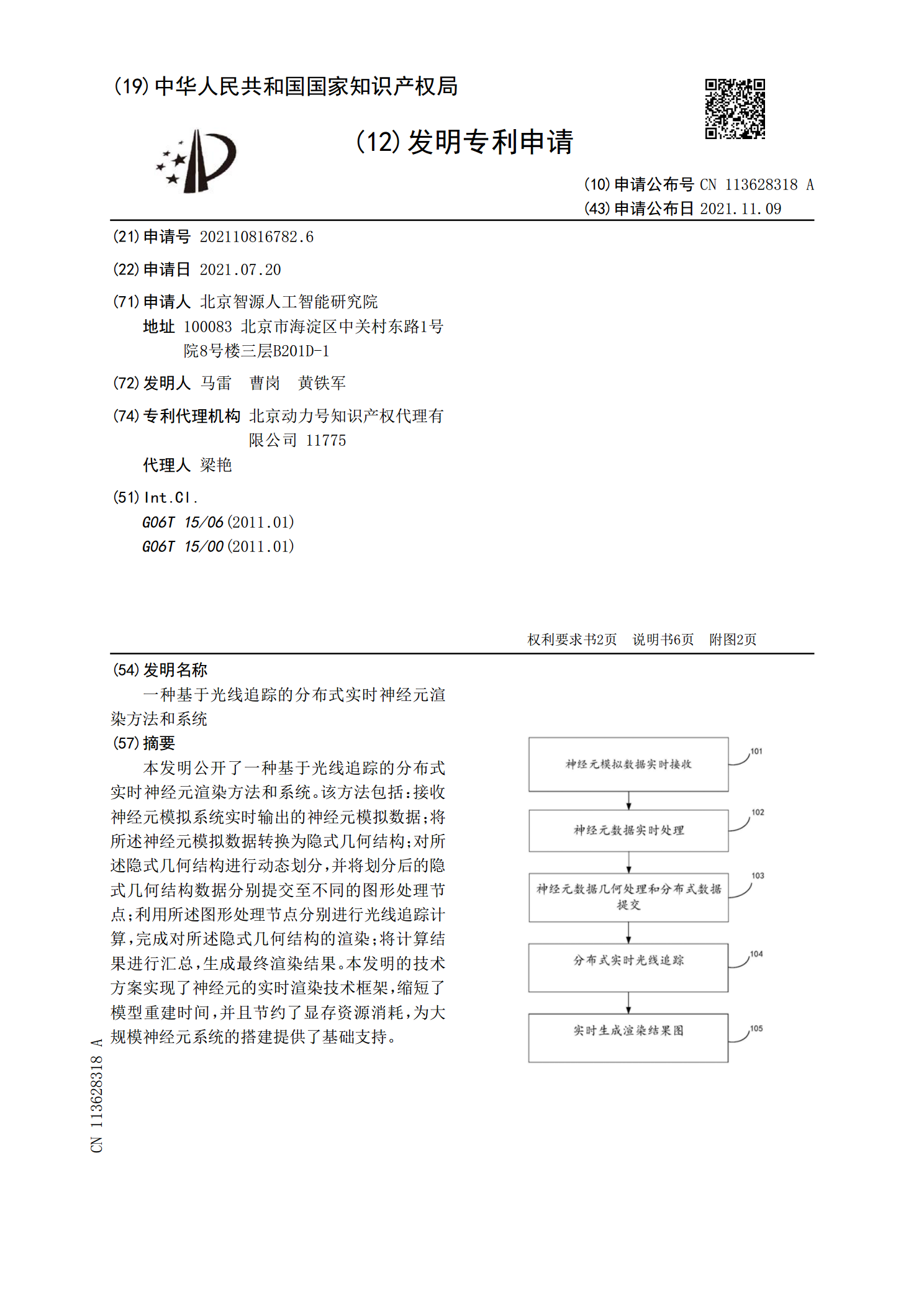
本发明公开了一种基于光线追踪的分布式实时神经元渲染方法和系统。该方法包括:接收神经元模拟系统实时输出的神经元模拟数据;将所述神经元模拟数据转换为隐式几何结构;对所述隐式几何结构进行动态划分,并将划分后的隐式几何结构数据分别提交至不同的图形处理节点;利用所述图形处理节点分别进行光线追踪计算,完成对所述隐式几何结构的渲染;将计算结果进行汇总,生成最终渲染结果。本发明的技术方案实现了神经元的实时渲染技术框架,缩短了模型重建时间,并且节约了显存资源消耗,为大规模神经元系统的搭建提供了基础支持。