
驾驶仿真场景中的图像处理方法、装置及存储介质.pdf

小新****ou


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
驾驶仿真场景中的图像处理方法、装置及存储介质.pdf
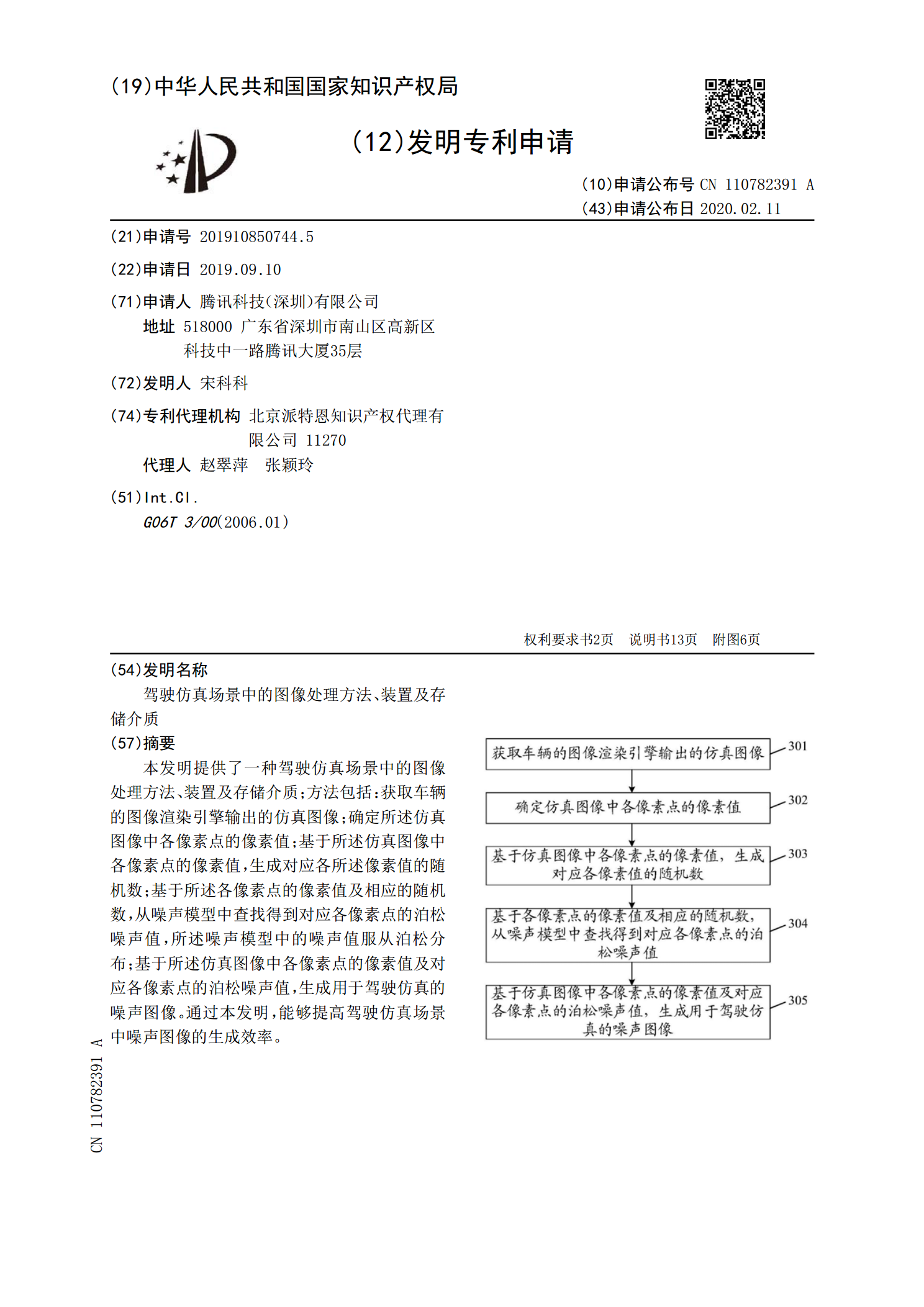
本发明提供了一种驾驶仿真场景中的图像处理方法、装置及存储介质;方法包括:获取车辆的图像渲染引擎输出的仿真图像;确定所述仿真图像中各像素点的像素值;基于所述仿真图像中各像素点的像素值,生成对应各所述像素值的随机数;基于所述各像素点的像素值及相应的随机数,从噪声模型中查找得到对应各像素点的泊松噪声值,所述噪声模型中的噪声值服从泊松分布;基于所述仿真图像中各像素点的像素值及对应各像素点的泊松噪声值,生成用于驾驶仿真的噪声图像。通过本发明,能够提高驾驶仿真场景中噪声图像的生成效率。

仿真场景的处理方法、装置、设备以及存储介质.pdf
本申请公开了一种仿真场景的处理方法、装置、设备以及存储介质,涉及智能驾驶领域。具体实现方案为:获取第一感知数据,并根据第一感知数据生成仿真场景,其中,第一感知数据是通过对路测场景的第二感知数据进行去噪处理得到的,路测场景中包括场景对象,第一感知数据包括场景对象的属性信息,所述属性信息满足预设条件。上述过程中,由于仿真场景是基于路测场景生成的,仿真场景中保留了路测场景中的场景对象的信息,与人工编辑生成仿真场景的方式相比,提高了仿真场景的真实性和复杂性。

AR场景中的图像处理方法、装置、电子设备及存储介质.pdf
本发明实施例公开了一种AR场景中的图像处理方法、装置、电子设备及存储介质,其中该方法包括:获取当前实景图像对应的深度图像;获取所述深度图像对应的环境光遮蔽图像;根据虚拟光照参数,对所述环境光遮蔽图像进行着色处理。本发明实施例通过结合3D虚拟光照和深度图,根据虚拟光照参数对深度图像对应的环境光遮蔽图像进行着色处理,能够模拟三维世界光成像过程,实时点亮图像中的不清晰区域或抑制过度曝光,提高画面显示质量,带来更佳的增强现实用户体验;并且将三维场景渲染转换成二维屏幕空间的像素着色,能够极大程度的简化计算。

场景图像处理方法、装置、AR设备以及存储介质.pdf
本公开提供了一种场景图像处理方法、装置、AR设备以及存储介质,其中,该方法包括:获取包含用户人体图像的场景图像;从获取的场景图像中提取目标用户人体图像;识别获取的场景图像指示的场景类别,并确定与该场景类别匹配的目标增强现实AR角色特效;将提取的目标用户人体图像与所述目标AR角色特效进行融合后显示。本公开实施例通过在动态图像采集的过程中将目标用户人体图像与场景类别匹配的目标AR角色特效进行融合,在实现角色扮演的同时,保留用户动态感知环境和交互环境,使得显示的融合图像更加真实逼真,增加了用户感知的真实感和融合
图像处理方法、图像处理装置及存储介质.pdf
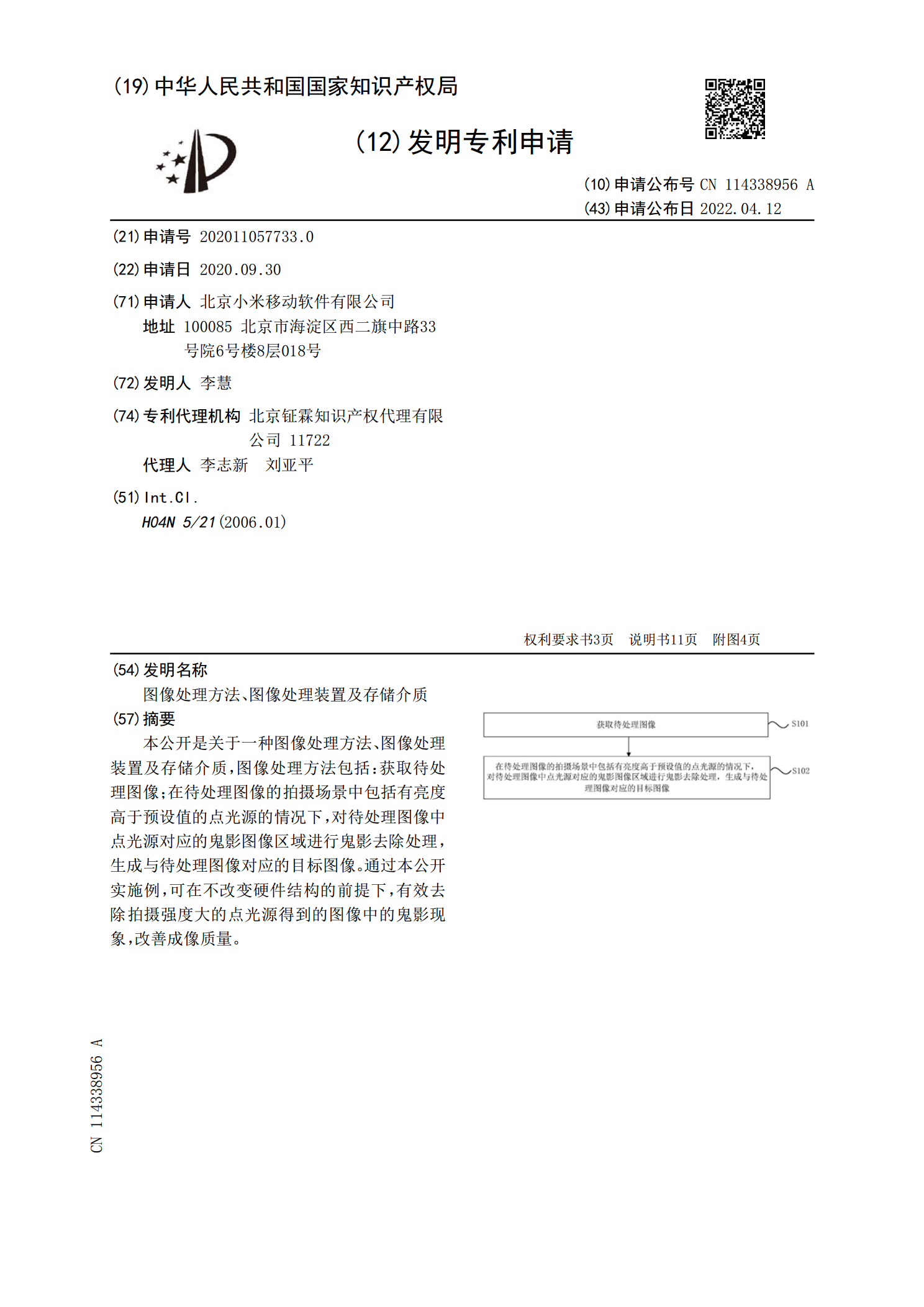
本公开是关于一种图像处理方法、图像处理装置及存储介质,图像处理方法包括:获取待处理图像;在待处理图像的拍摄场景中包括有亮度高于预设值的点光源的情况下,对待处理图像中点光源对应的鬼影图像区域进行鬼影去除处理,生成与待处理图像对应的目标图像。通过本公开实施例,可在不改变硬件结构的前提下,有效去除拍摄强度大的点光源得到的图像中的鬼影现象,改善成像质量。