
一种无人机巡检航线构建方法.pdf

一只****iu


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人机巡检航线构建方法.pdf
本发明公开了一种无人机巡检航线构建方法,利用数据提取技术从无人机字幕文件中提取航线点位置和时间信息,以投影转换算法对航线点位置坐标进行转换,去除错误航线点坐标并对剩余航线点连线进行平滑处理,再以三维渲染技术进行仿真,实现无人机巡检过程的监控和管理。
一种光伏电站无人机巡检航线的规划方法及系统.pdf
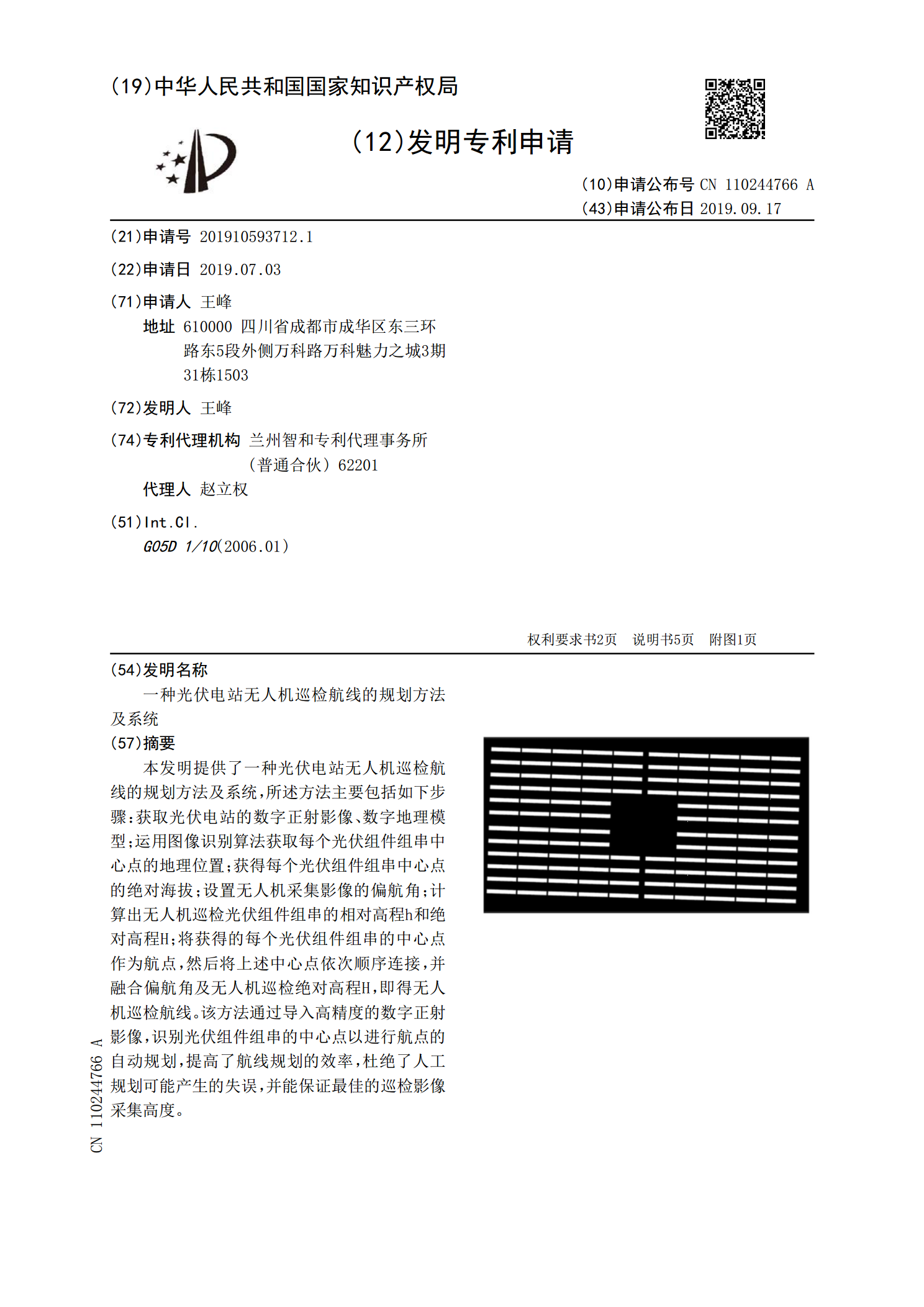
本发明提供了一种光伏电站无人机巡检航线的规划方法及系统,所述方法主要包括如下步骤:获取光伏电站的数字正射影像、数字地理模型;运用图像识别算法获取每个光伏组件组串中心点的地理位置;获得每个光伏组件组串中心点的绝对海拔;设置无人机采集影像的偏航角;计算出无人机巡检光伏组件组串的相对高程h和绝对高程H;将获得的每个光伏组件组串的中心点作为航点,然后将上述中心点依次顺序连接,并融合偏航角及无人机巡检绝对高程H,即得无人机巡检航线。该方法通过导入高精度的数字正射影像,识别光伏组件组串的中心点以进行航点的自动规划,提

一种输电杆塔的无人机巡检航线自动生成方法.pdf
本发明公开了一种输电杆塔的无人机巡检航线自动生成方法,包括:获取待巡检输电杆塔的塔基点云投影;根据塔基点云投影,提取区域点云;区域点云包含输电杆塔的横担及左右地线的完整结构;在区域点云内自下往上动态截取第一预设距离范围内的平面点云,构造点云组;根据是否满足横担高程间隔距离对点云组进行过滤;根据过滤后的点云组,获取输电杆塔的横担层数和每层横担中心点的位置;识别输电杆塔的塔型,并获取挂点位置信息;根据挂点位置信息,由穿针引线的方式生成航点序列对;根据航点序列对,按预设安全航线距离生成自动巡检航线。可实现自动识
一种巡检航线规划方法.pdf
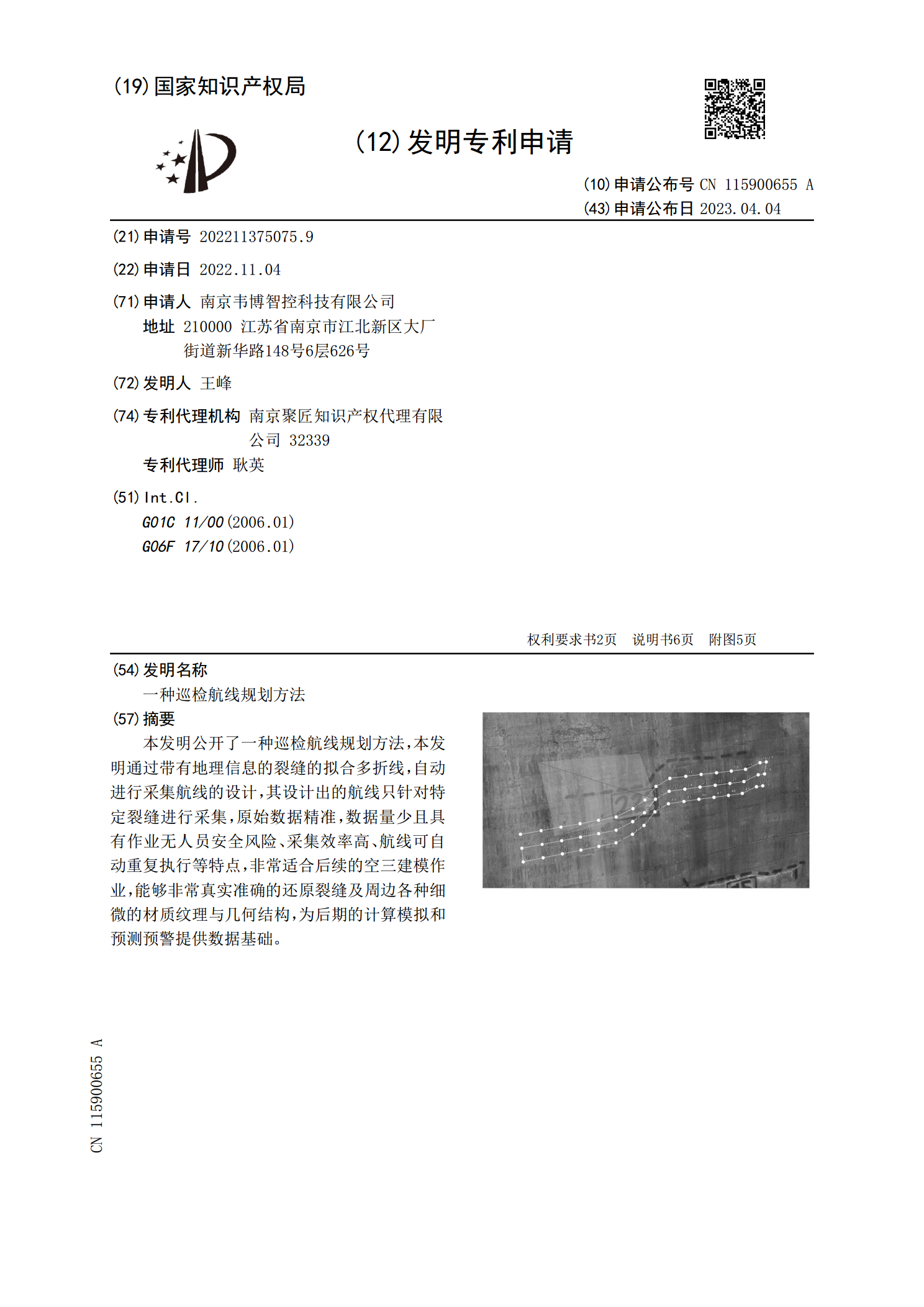
本发明公开了一种巡检航线规划方法,本发明通过带有地理信息的裂缝的拟合多折线,自动进行采集航线的设计,其设计出的航线只针对特定裂缝进行采集,原始数据精准,数据量少且具有作业无人员安全风险、采集效率高、航线可自动重复执行等特点,非常适合后续的空三建模作业,能够非常真实准确的还原裂缝及周边各种细微的材质纹理与几何结构,为后期的计算模拟和预测预警提供数据基础。
一种基于自适应巡航的无人机施工巡检航线规划方法.pdf
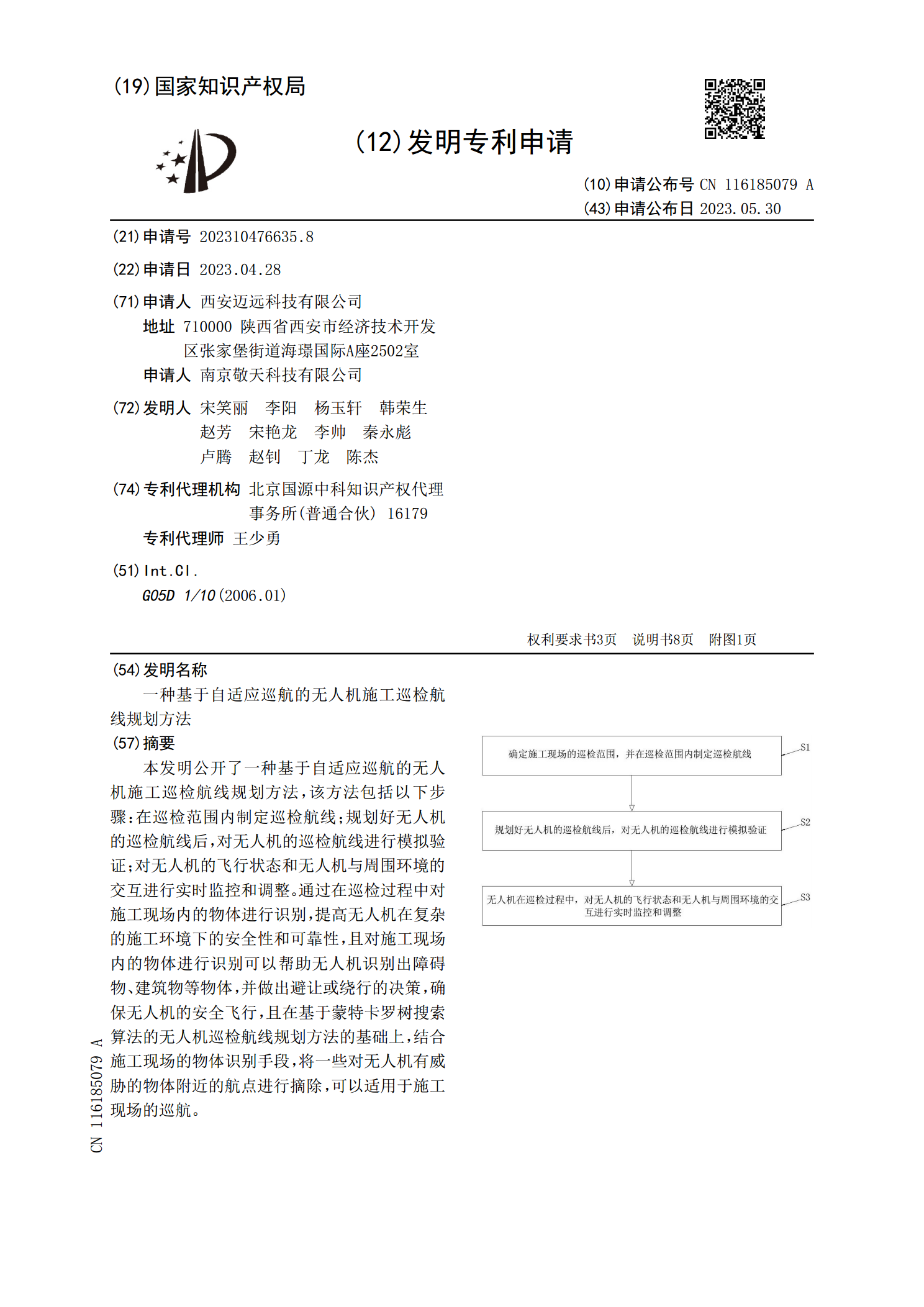
本发明公开了一种基于自适应巡航的无人机施工巡检航线规划方法,该方法包括以下步骤:在巡检范围内制定巡检航线;规划好无人机的巡检航线后,对无人机的巡检航线进行模拟验证;对无人机的飞行状态和无人机与周围环境的交互进行实时监控和调整。通过在巡检过程中对施工现场内的物体进行识别,提高无人机在复杂的施工环境下的安全性和可靠性,且对施工现场内的物体进行识别可以帮助无人机识别出障碍物、建筑物等物体,并做出避让或绕行的决策,确保无人机的安全飞行,且在基于蒙特卡罗树搜索算法的无人机巡检航线规划方法的基础上,结合施工现场的物体