
一种云渲染动态编码方法.pdf

康佳****文库


1/5

2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种云渲染动态编码方法.pdf
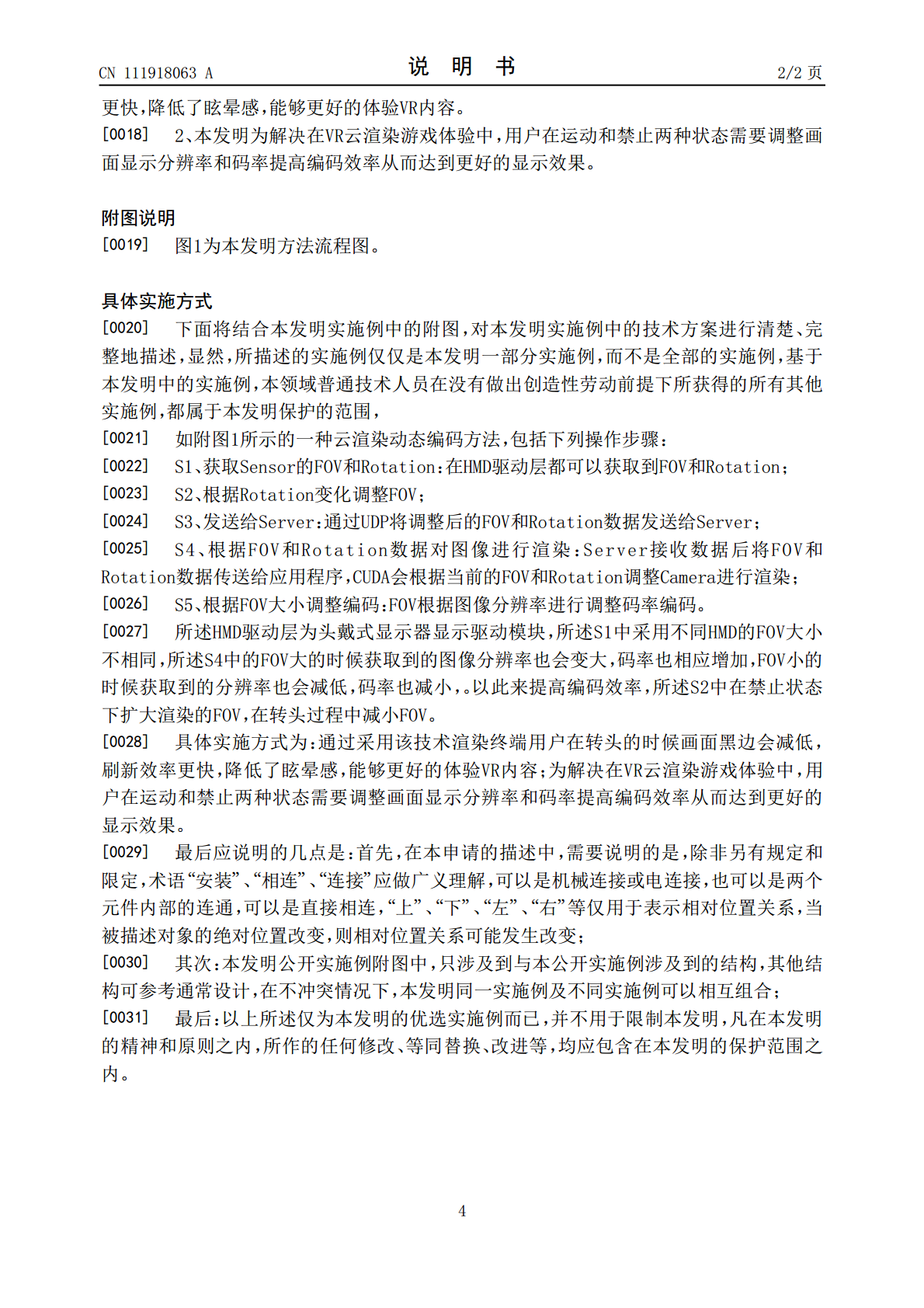
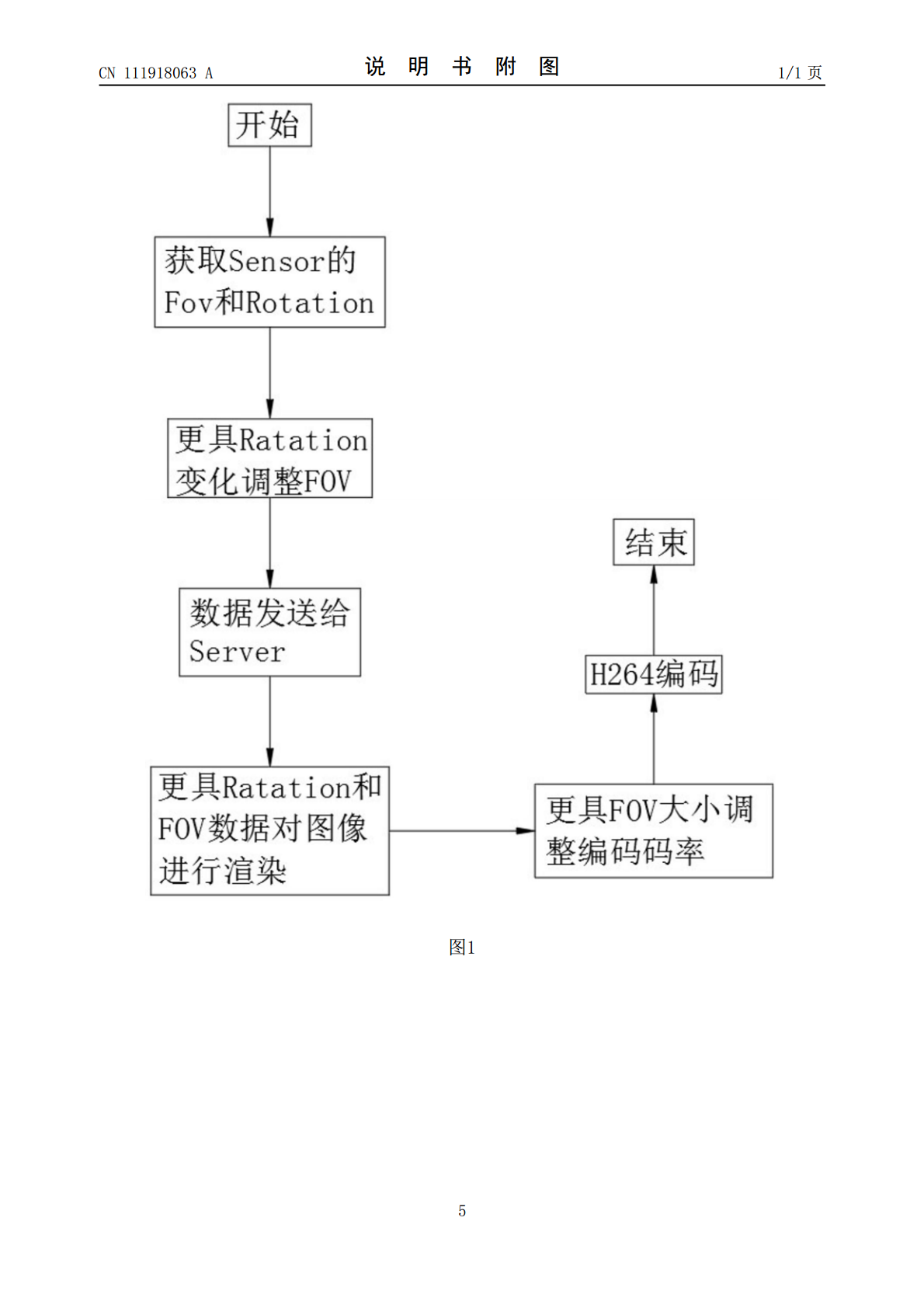
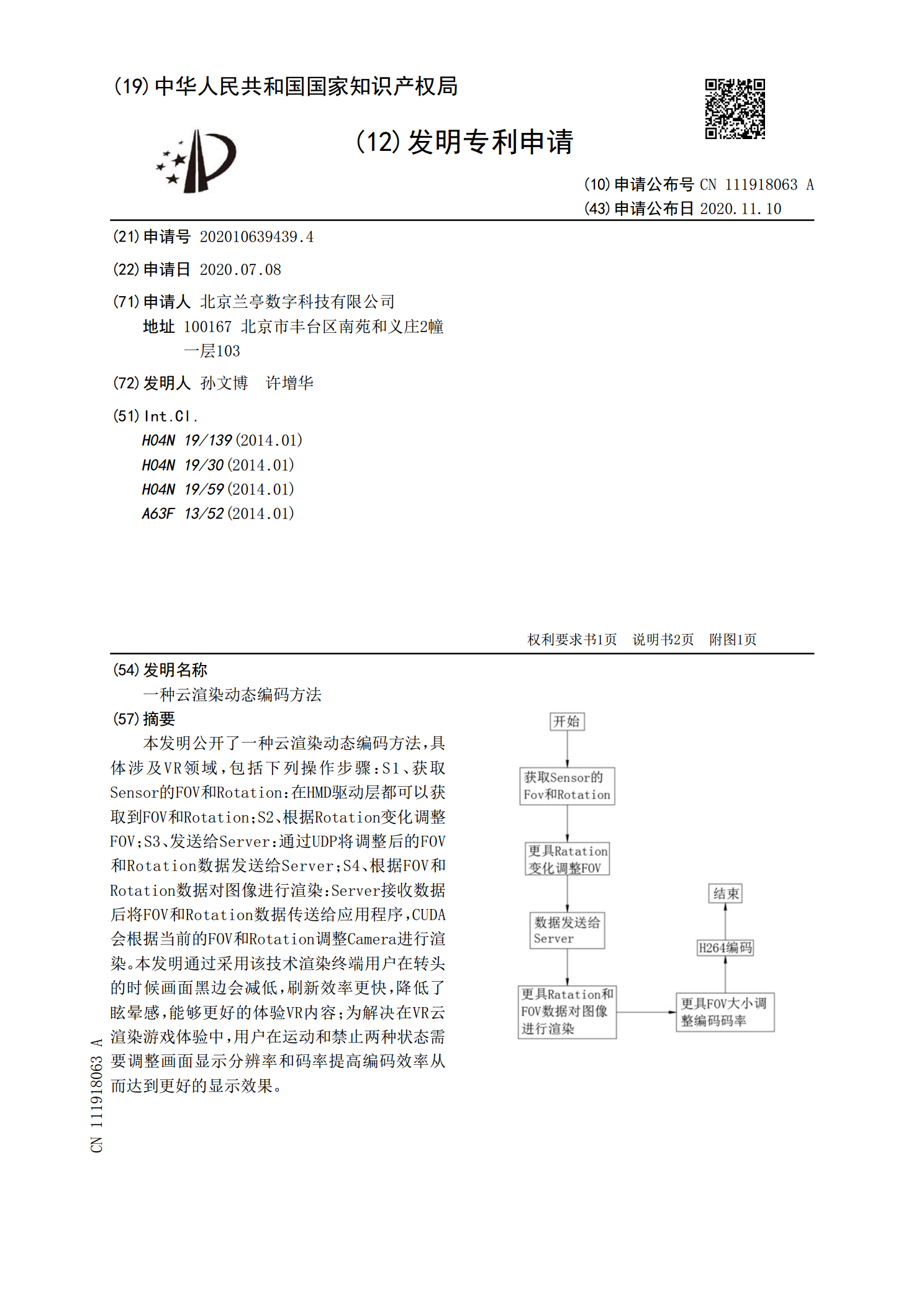
本发明公开了一种云渲染动态编码方法,具体涉及VR领域,包括下列操作步骤:S1、获取Sensor的FOV和Rotation:在HMD驱动层都可以获取到FOV和Rotation;S2、根据Rotation变化调整FOV;S3、发送给Server:通过UDP将调整后的FOV和Rotation数据发送给Server;S4、根据FOV和Rotation数据对图像进行渲染:Server接收数据后将FOV和Rotation数据传送给应用程序,CUDA会根据当前的FOV和Rotation调整Camera进行渲染。本发明通

一种基于云数据的VR动态渲染方法.pdf
本发明涉及VR动态渲染技术领域,具体为一种基于云数据的VR动态渲染装置,所述支撑柱的上端固定连接有支撑板,所述支撑板的上表面后端固定连接有数据处理器,所述支撑板的上表面且位于数据处理器的前部固定连接有VR显示器,所述控制器固定安装在VR显示器的侧表面,所述显示屏固定安装在VR显示器的前表面中部,所述支撑板的上表面侧端固定连接有放置架,所述VR眼镜设置在放置架的上表面,所述VR显示器包括过滤网和防护框,所述过滤网固定安装在VR显示器的侧表面,所述防护框固定安装在VR显示器的内部。VR显示器可以根据其自身温度
一种云渲染系统及云渲染方法.pdf
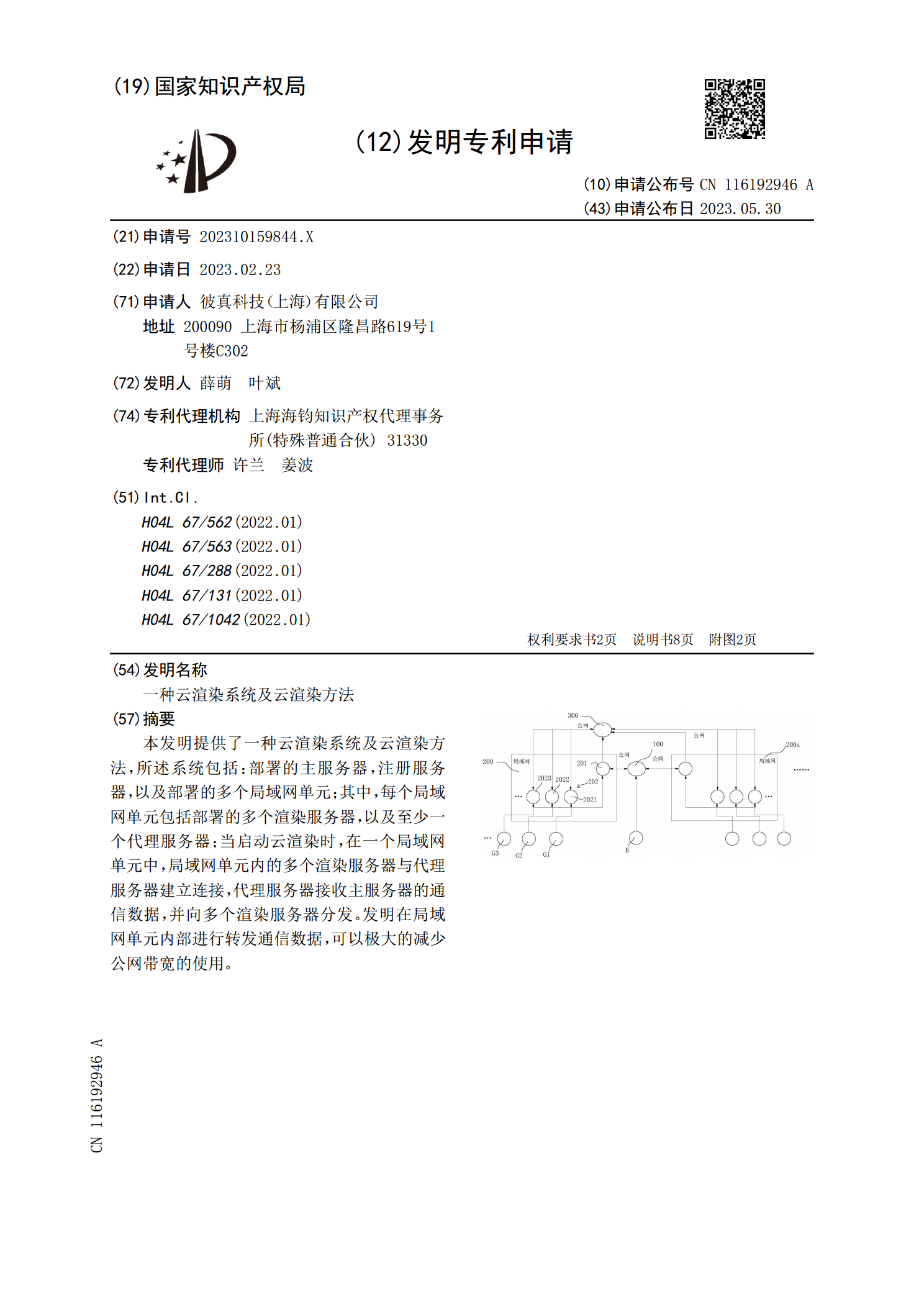
本发明提供了一种云渲染系统及云渲染方法,所述系统包括:部署的主服务器,注册服务器,以及部署的多个局域网单元;其中,每个局域网单元包括部署的多个渲染服务器,以及至少一个代理服务器;当启动云渲染时,在一个局域网单元中,局域网单元内的多个渲染服务器与代理服务器建立连接,代理服务器接收主服务器的通信数据,并向多个渲染服务器分发。发明在局域网单元内部进行转发通信数据,可以极大的减少公网带宽的使用。

一种实时云渲染系统中视频动态索引操控方法.pdf
本发明提供一种实时云渲染系统中视频动态索引操控方法包括基于云渲染服务端对完整的宽屏应用画面生成一张整体鸟瞰图;根据获取的宽屏应用画面计算其宽度、高度以及索引画面的宽度;将鸟瞰图的图像参数以及索引画面宽度返回至客户端;基于云渲染客户端根据获取的鸟瞰图以及索引画面在宽屏应用画面的占比,得到当前索引位置矩形所处位置的相对父窗口的x偏移,基于云渲染客户端,解码显示。通过视频动态索引的方法,只局部加载和实时渲染宽屏应用中被终端显示器观看到的部分画面,达到仅对部分画面进行局部实时渲染处理的效果。

一种动态渲染方法.pdf
本发明公开了一种动态渲染方法,该方法构造关联有若干个渲染组件的渲染实体;构造挂载有若干个渲染实体的渲染场景;渲染组件包括用于管理模型数据的若干个属性接口和用于记录渲染参数是否改变状态的变量;渲染实体包括用于控制渲染实体在渲染场景的变换的转换接口和用于标记转换接口中相关矩阵修改状态的变量;属性接口与转换接口共同决定渲染场景的最终呈现状态;转换接口中用于标记相关矩阵修改状态的变量有改变时或渲染组件中用于记录渲染参数是否改变状态的变量发生改变时,通知渲染引擎刷新。本发明通过动态改变渲染引擎刷新频率以降低硬件功耗