
多视点实时人体运动、手势、表情、纹理重建系统.pdf

猫巷****傲柏


1/7

2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多视点实时人体运动、手势、表情、纹理重建系统.pdf
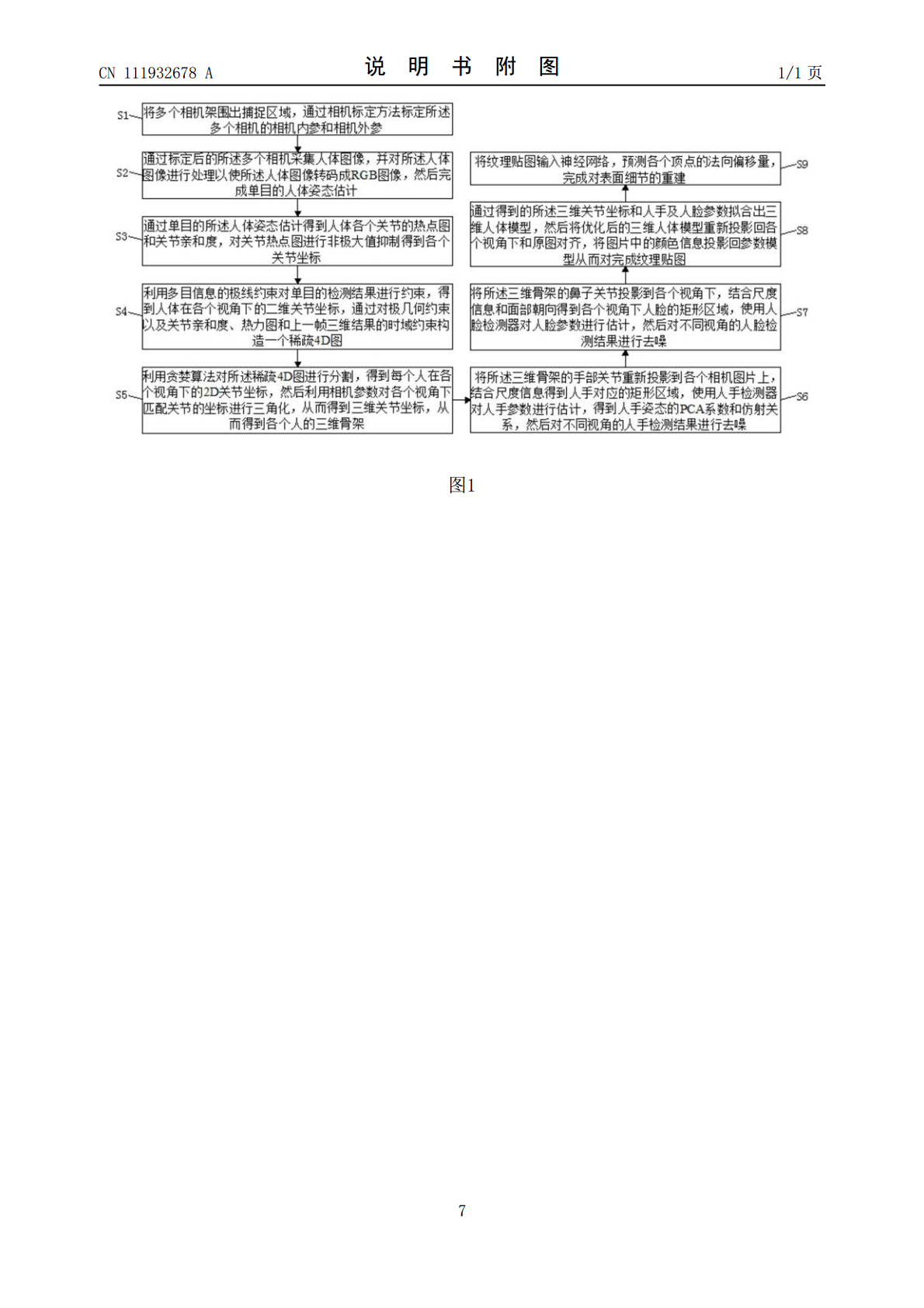
本发明提供了一种多视点实时人体运动、手势、表情、纹理重建系统,该多视点实时人体运动、手势、表情、纹理重建系统包括:将多个相机架围出捕捉区域,通过相机标定方法标定所述多个相机的相机内参和相机外参;通过标定后的所述多个相机采集人体图像,并对所述人体图像进行处理以使所述人体图像转码成RGB图像,然后完成单目的人体姿态估计;通过单目的所述人体姿态估计得到人体各个关节的热点图和关节亲和度,对关节热点图进行非极大值抑制得到各个关节坐标;从而得到人体三维关节坐标,从而得到人体三维重建模型。本系统利用深度学习来完成人体姿
多视点相机下的实时三维人体体型与姿态重建方法及装置.pdf
本发明公开了一种多视点相机下的实时三维人体体型与姿态重建方法及装置,其中,该方法包括:将多个相机架围出捕捉区域,通过相机标定方法标定多个相机的相机内参和相机外参;通过标定后的多个相机在捕捉区域内采集人体图像并处理以使人体图像转码成RGB图像,利用预先训练好的卷积神经网络对RGB图像进行检测并生成每个视角下的人体关节二维坐标信息,并对其进行三角化得到人体三维关节坐标信息;利用人体三维关节坐标信息优化预设人体模型中的姿态参数和形状参数,再通过时域优化稳定优化后的预设人体模型以得到人体三维重建模型。该方法利用深

实时三维人体重建的纹理渲染方法、系统、芯片、设备和介质.pdf
实时三维人体重建的纹理渲染方法、系统、芯片、设备和介质,方法包括:获取拍摄对象的当前人体模型和深度图像;选取一个当前人体模型作为标准模型,将其顶点重投影至深度图像,提取顶点对应的颜色信息及图像坐标,该颜色信息为颜色初始值,图像坐标转换成纹理坐标;将后续的人体模型顶点的颜色信息与颜色初始值计算加权和,作为标准模型顶点的新颜色;计算当前人体模型的子纹理贴图和子掩膜,组合成完整的纹理图和掩膜;根据纹理图、纹理坐标进行渲染。本发明基于GPU能够快速完成所需纹理的生成和优化,得到高质量的纹理图集,消除光照变化带来的
基于多视点视频的复杂动态人体对象三维重建方法及系统.pdf
本发明公开了一种基于多视点视频的复杂动态人体对象三维重建方法及系统,其中,方法包括以下步骤:对目标人体对象进行多视点拍摄,获得在同一时刻下的多视点二维图像;利用深度网络学习后的深度神经网络模型分别对每个视点的二维图像序列中的人体各部分进行预测,分割出目标人体对象的轮廓信息和人体对象的骨架信息;利用标定后的每个视点的相机内参和外参信息,结合分割后的目标人体对象的轮廓信息和人体对象的骨架信息,进行人体的三维建模。该方法可以结合相机标定等过程对视频序列中的人体对象进行三维重建,从而实现准确的人物对象分割,同时达
多视点非接触式人体运动捕捉的研究.pptx
汇报人:目录PARTONEPARTTWO研究背景研究意义PARTTHREE多视点非接触式人体运动捕捉技术定义多视点非接触式人体运动捕捉技术原理多视点非接触式人体运动捕捉技术应用领域PARTFOUR国内外研究现状研究热点与难点现有研究的不足之处PARTFIVE研究方法实验设计数据采集与分析方法PARTSIX实验结果展示数据分析与解释结果讨论与解释PARTSEVEN研究结论总结技术创新点总结未来研究方向展望对行业或社会的贡献THANKYOU