
显示方法及装置、设备、存储介质.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
显示方法、装置,显示设备及存储介质.pdf
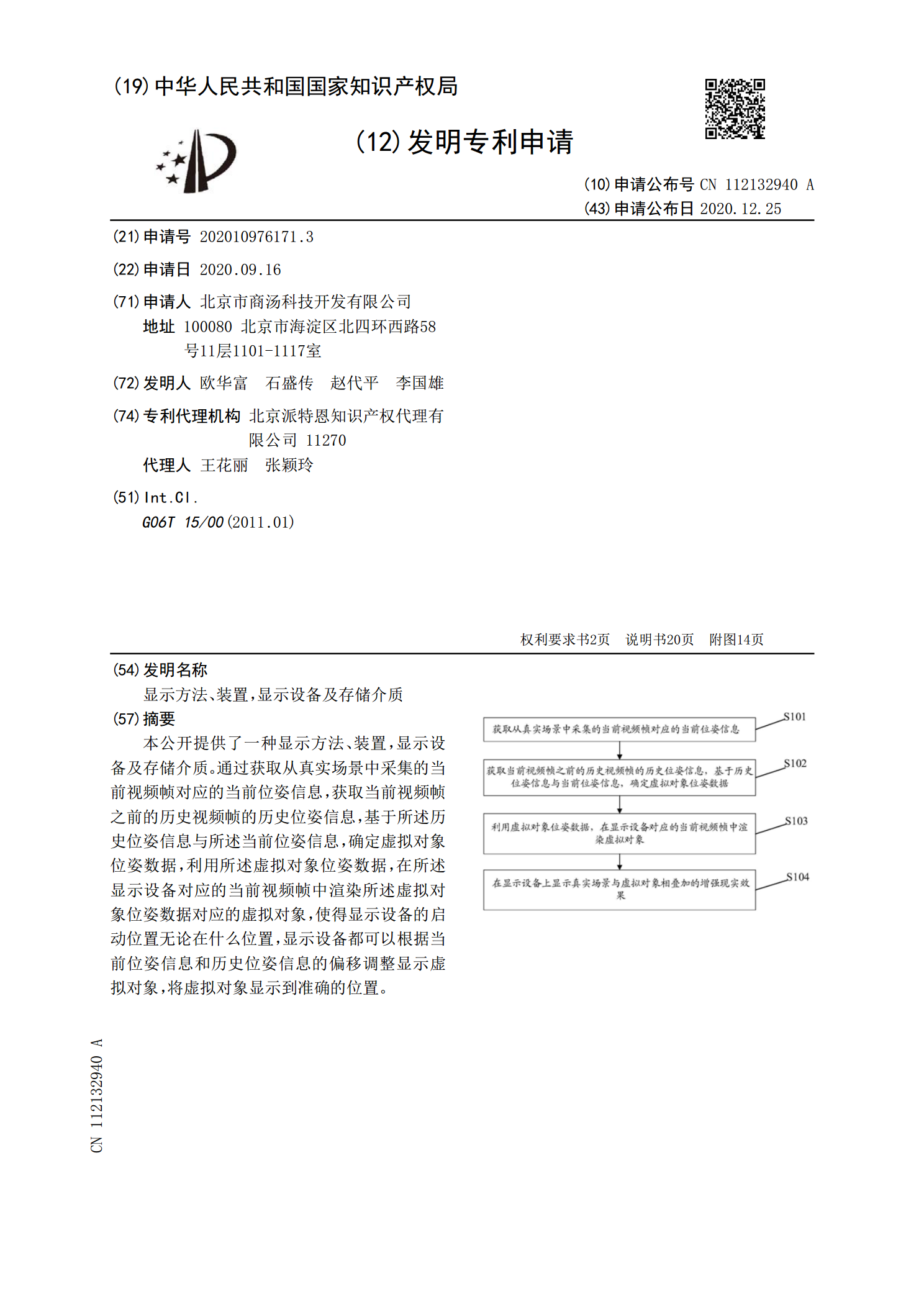
本公开提供了一种显示方法、装置,显示设备及存储介质。通过获取从真实场景中采集的当前视频帧对应的当前位姿信息,获取当前视频帧之前的历史视频帧的历史位姿信息,基于所述历史位姿信息与所述当前位姿信息,确定虚拟对象位姿数据,利用所述虚拟对象位姿数据,在所述显示设备对应的当前视频帧中渲染所述虚拟对象位姿数据对应的虚拟对象,使得显示设备的启动位置无论在什么位置,显示设备都可以根据当前位姿信息和历史位姿信息的偏移调整显示虚拟对象,将虚拟对象显示到准确的位置。

显示方法、装置、设备及存储介质.pdf
本公开实施例公开了显示方法、装置、设备及存储介质。该方法包括:显示多媒体流播放界面,多媒体流播放界面包括第一多媒体内容,多媒体流包括第一多媒体内容及第二多媒体内容,当检测到针对多媒体流播放页面的预设多媒体内容切换操作时,多媒体流播放界面的第一多媒体内容切换为第二多媒体内容,其中,第二多媒体内容或第一多媒体内容包括预设主题的信息及与预设主题关联的预设控件,预设控件用于发布与预设主题关联的目标内容。通过采用上述技术方案,用户在浏览多媒体流播放界面过程中,预设主题和对应的控件可以起到提示用户发布与预设主题关联的
显示方法及装置、设备、存储介质.pdf
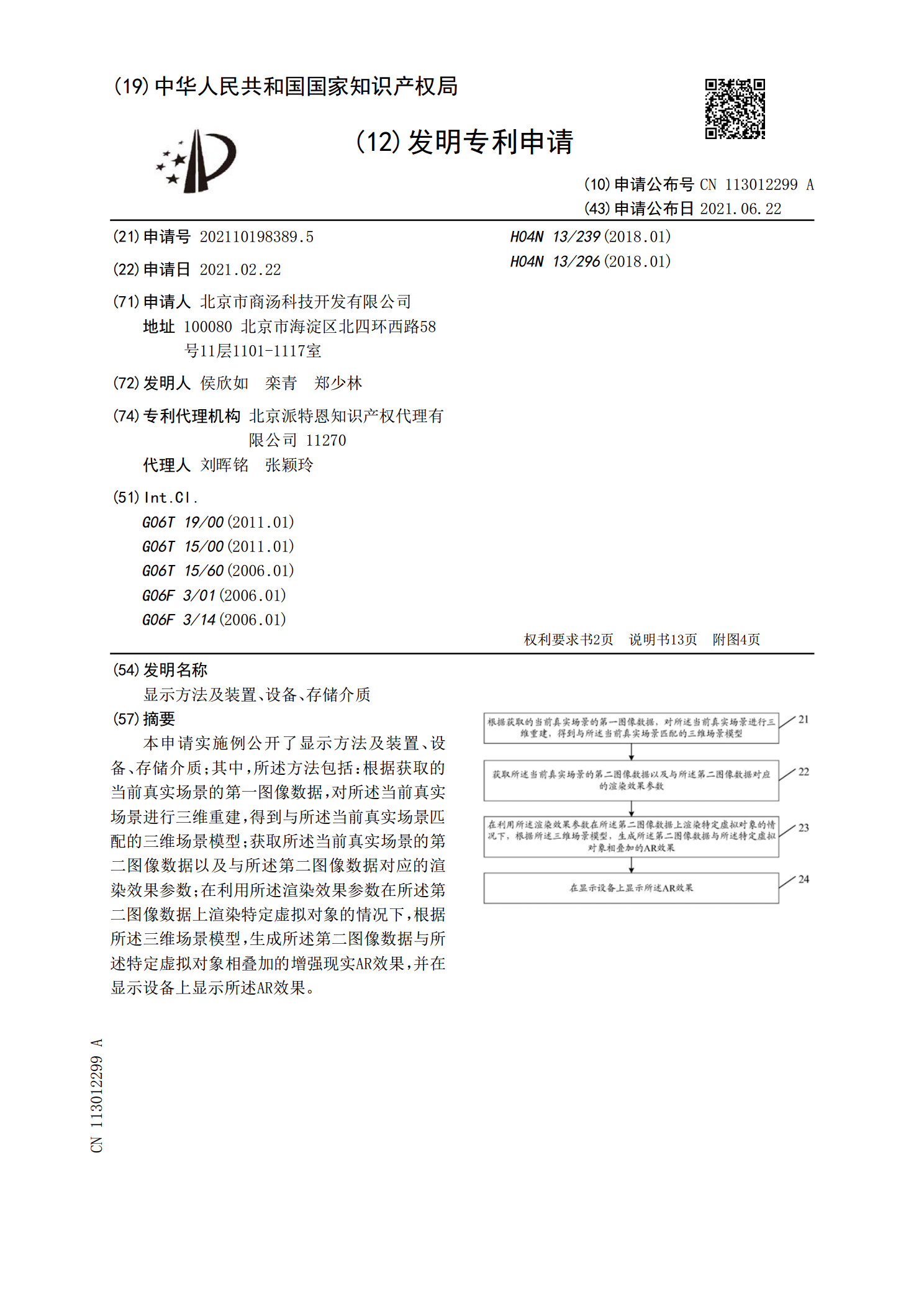
本申请实施例公开了显示方法及装置、设备、存储介质;其中,所述方法包括:根据获取的当前真实场景的第一图像数据,对所述当前真实场景进行三维重建,得到与所述当前真实场景匹配的三维场景模型;获取所述当前真实场景的第二图像数据以及与所述第二图像数据对应的渲染效果参数;在利用所述渲染效果参数在所述第二图像数据上渲染特定虚拟对象的情况下,根据所述三维场景模型,生成所述第二图像数据与所述特定虚拟对象相叠加的增强现实AR效果,并在显示设备上显示所述AR效果。

显示方法及装置、设备、存储介质.pdf
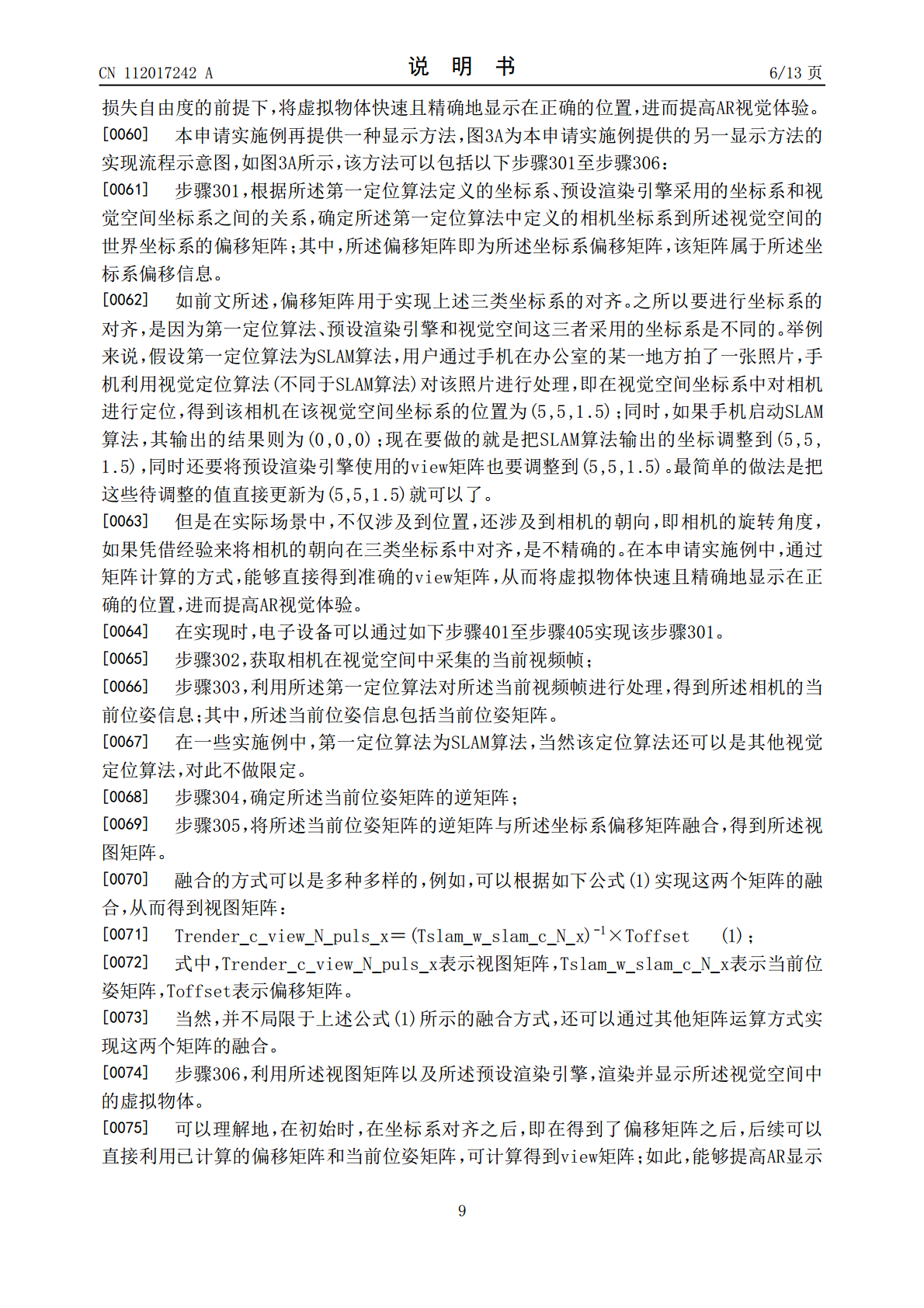
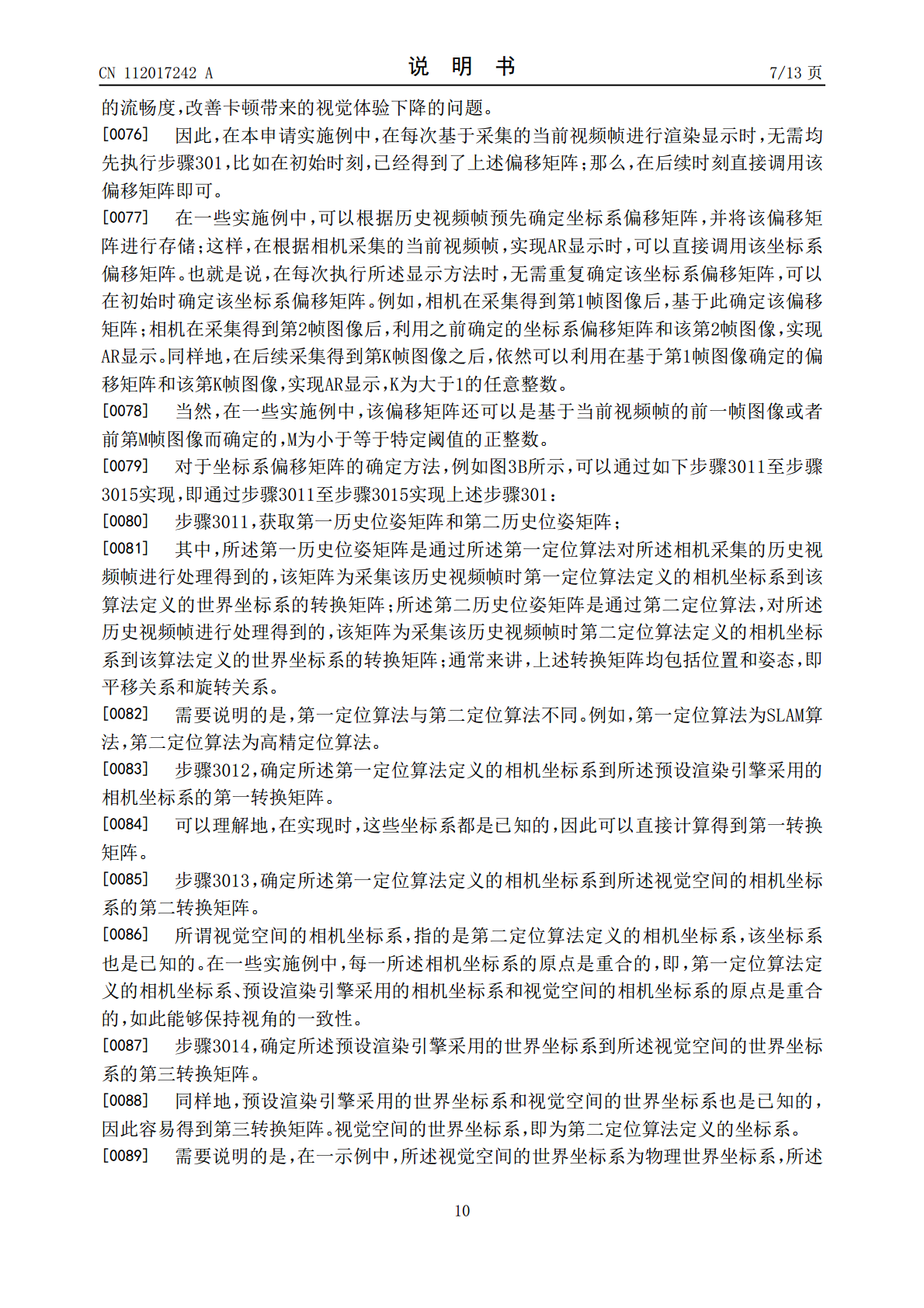
本申请实施例公开了显示方法及装置、设备、存储介质,其中,所述方法包括:获取通过第一定位算法确定的相机的当前位姿信息;根据所述当前位姿信息和预先确定的坐标系偏移信息,确定渲染用的视图信息;其中,所述坐标系偏移信息是根据所述第一定位算法定义的坐标系、预设渲染引擎采用的坐标系和视觉空间坐标系之间的关系而确定的;利用所述视图信息以及所述预设渲染引擎,渲染并显示所述视觉空间中的虚拟物体。
图像显示方法、装置、显示设备及存储介质.pdf
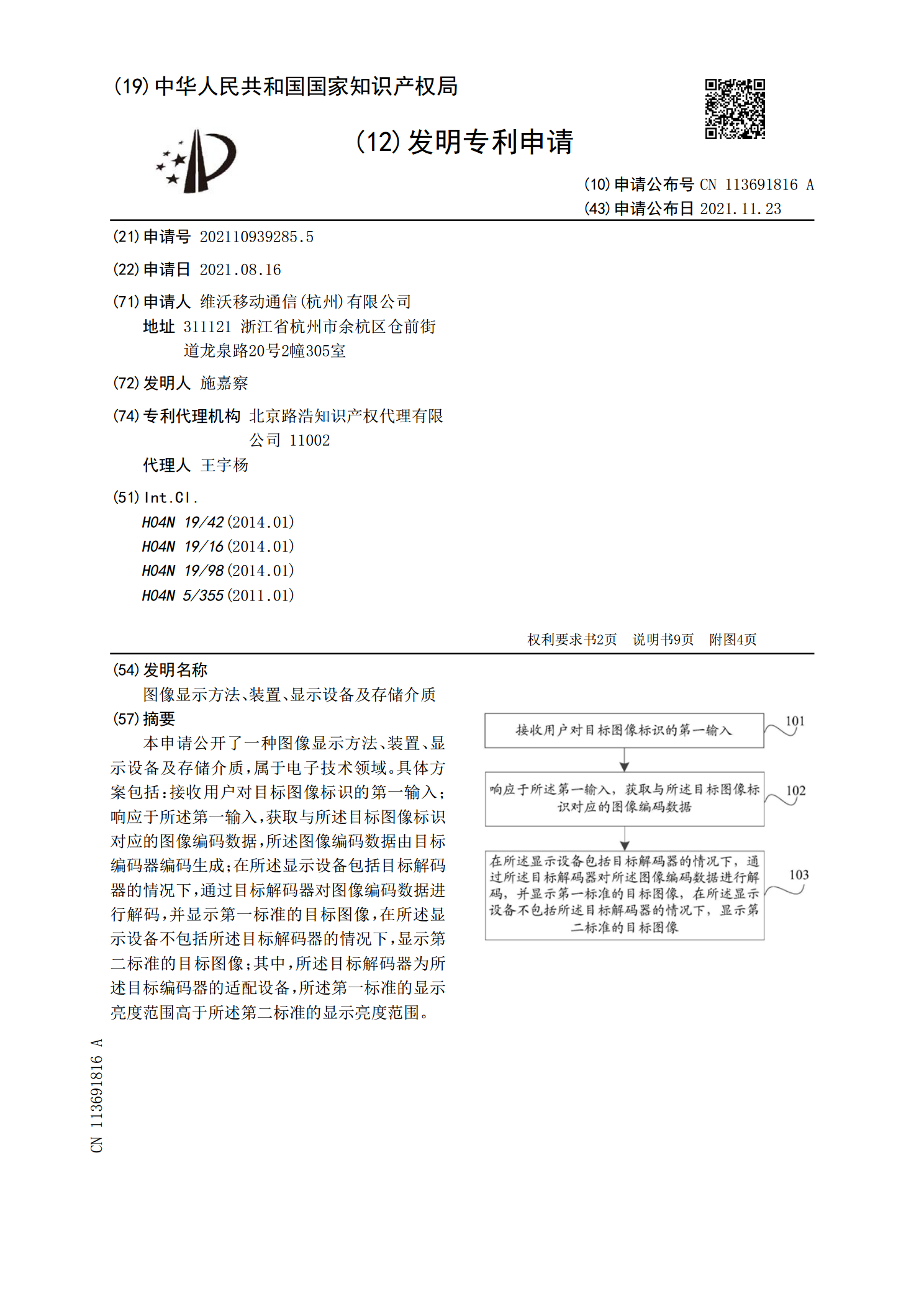
本申请公开了一种图像显示方法、装置、显示设备及存储介质,属于电子技术领域。具体方案包括:接收用户对目标图像标识的第一输入;响应于所述第一输入,获取与所述目标图像标识对应的图像编码数据,所述图像编码数据由目标编码器编码生成;在所述显示设备包括目标解码器的情况下,通过目标解码器对图像编码数据进行解码,并显示第一标准的目标图像,在所述显示设备不包括所述目标解码器的情况下,显示第二标准的目标图像;其中,所述目标解码器为所述目标编码器的适配设备,所述第一标准的显示亮度范围高于所述第二标准的显示亮度范围。