
一种基于多视角深度相机的三维人像实时重建及渲染方法.pdf

雨巷****珺琦

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于多视角深度相机的三维人像实时重建及渲染方法.pdf
本发明公开的基于多视角深度相机的三维人像实时重建及渲染方法,涉及计算机视觉领域,通过对多个相机进行标定,得到多个相机之间的相对位姿并根据相对位姿,将多个相机输出的深度信息转置于统一的三维坐标系之内,形成点云,分别判断各个体素是否被点云占据,若是,则根据相对位姿及预先创建的人像掩膜,分别为各个体素构建基于截断的符号距离函数,对各个体素对应的基于截断的符号距离函数进行加权平均并利用点云网格化算法,得到人体三维网格,对颜色信息进行加权平均,得到携带颜色信息的人体三维网格,将人体三维网格输入预先构建的对抗神经网络

基于深度相机的三维场景实时重建方法.pdf
本发明公开了一种基于深度相机的三维场景实时重建方法,包括以下步骤:原始深度数据和颜色数据的获取,深度数据去噪处理,深度图像坐标转换,相机姿态追踪,点云融合和记录颜色信息,点云模型隐含表面渲染,场景模型重建。本发明利用单个深度相机扫描场景,获得场景的深度数据流,在计算机上完成对数据的实时处理,并生成相应的三维模型,该方法可以提供低成本、易操作、高质量、具有实时性的三维重建系统,产生高质量、可视化强的三维模型。
一种基于向内环视多RGBD相机的实时动态人体三维重建方法.pdf
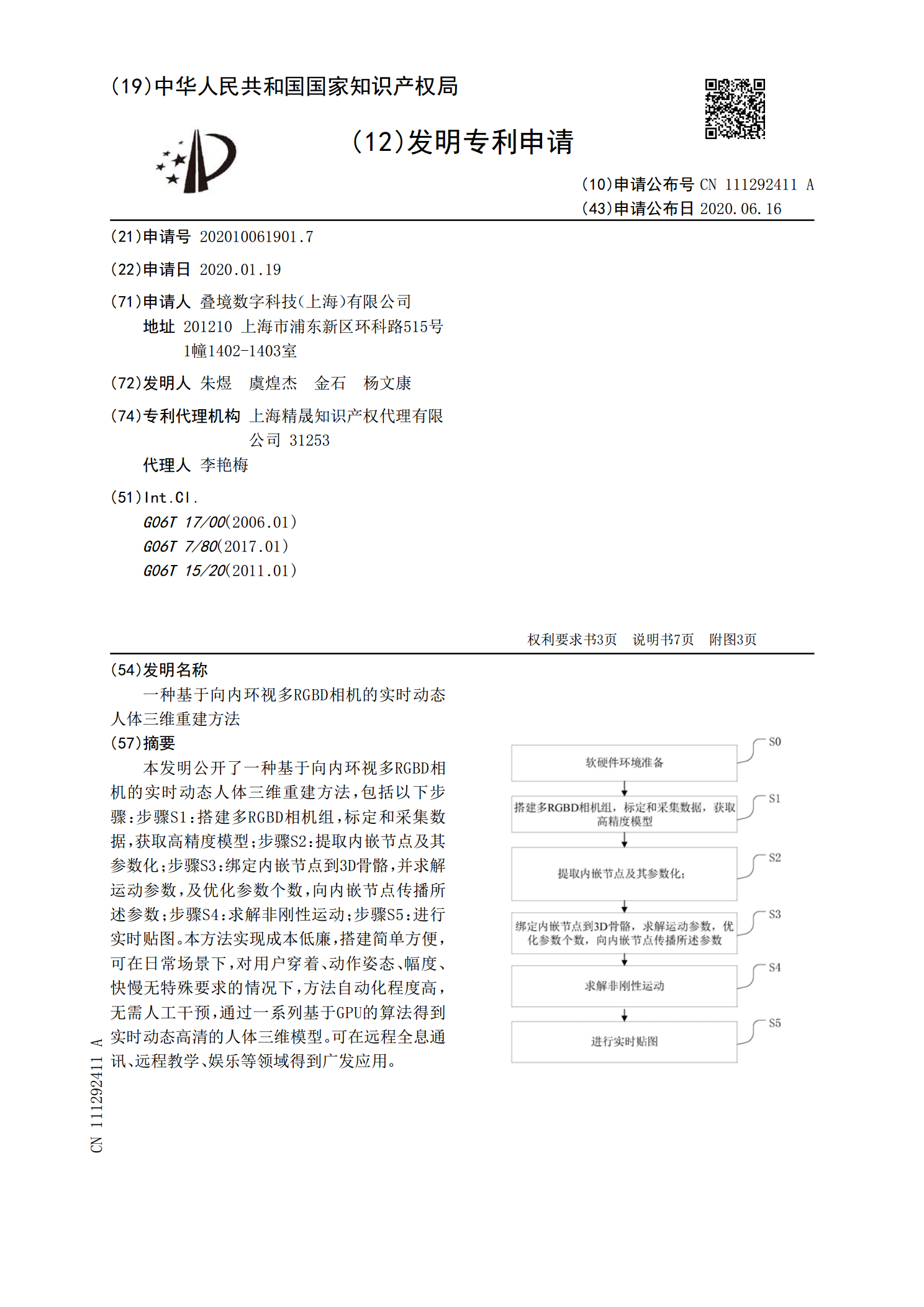
本发明公开了一种基于向内环视多RGBD相机的实时动态人体三维重建方法,包括以下步骤:步骤S1:搭建多RGBD相机组,标定和采集数据,获取高精度模型;步骤S2:提取内嵌节点及其参数化;步骤S3:绑定内嵌节点到3D骨骼,并求解运动参数,及优化参数个数,向内嵌节点传播所述参数;步骤S4:求解非刚性运动;步骤S5:进行实时贴图。本方法实现成本低廉,搭建简单方便,可在日常场景下,对用户穿着、动作姿态、幅度、快慢无特殊要求的情况下,方法自动化程度高,无需人工干预,通过一系列基于GPU的算法得到实时动态高清的人体三维模
多视点相机下的实时三维人体体型与姿态重建方法及装置.pdf
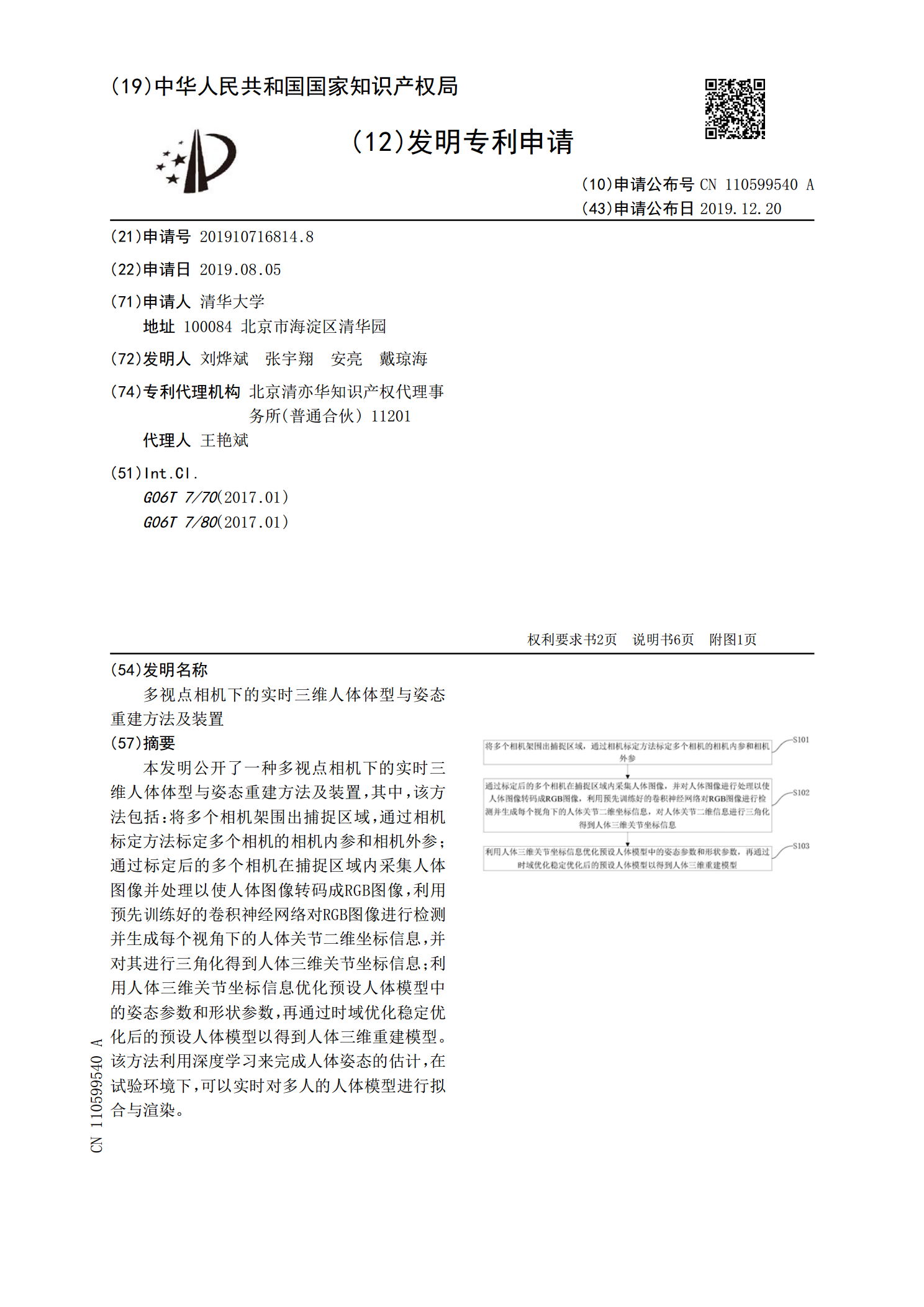
本发明公开了一种多视点相机下的实时三维人体体型与姿态重建方法及装置,其中,该方法包括:将多个相机架围出捕捉区域,通过相机标定方法标定多个相机的相机内参和相机外参;通过标定后的多个相机在捕捉区域内采集人体图像并处理以使人体图像转码成RGB图像,利用预先训练好的卷积神经网络对RGB图像进行检测并生成每个视角下的人体关节二维坐标信息,并对其进行三角化得到人体三维关节坐标信息;利用人体三维关节坐标信息优化预设人体模型中的姿态参数和形状参数,再通过时域优化稳定优化后的预设人体模型以得到人体三维重建模型。该方法利用深

基于深度相机和追踪相机的实时三维重建技术研究的任务书.docx
基于深度相机和追踪相机的实时三维重建技术研究的任务书任务书一、任务背景随着科技的不断进步,人们对于三维重建技术的需求也越来越高。三维重建技术可以将现实世界中的物体、场景等信息转换为数字化的三维模型,提高科研、工程、文化等领域的效率和应用价值。在实际应用中,常见的三维重建技术主要有基于深度相机和追踪相机的实时三维重建技术。基于深度相机的三维重建技术主要是通过激光或红外线等方式测得物体或场景的距离,从而构建出高精度的三维模型;追踪相机的三维重建技术则是通过追踪相机获取物体或场景的位置和姿态信息,从而生成三维模