
一种基于对抗训练先验学习的单视图三维重建系统及其方法.pdf

山梅****ai


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于对抗训练先验学习的单视图三维重建系统及其方法.pdf
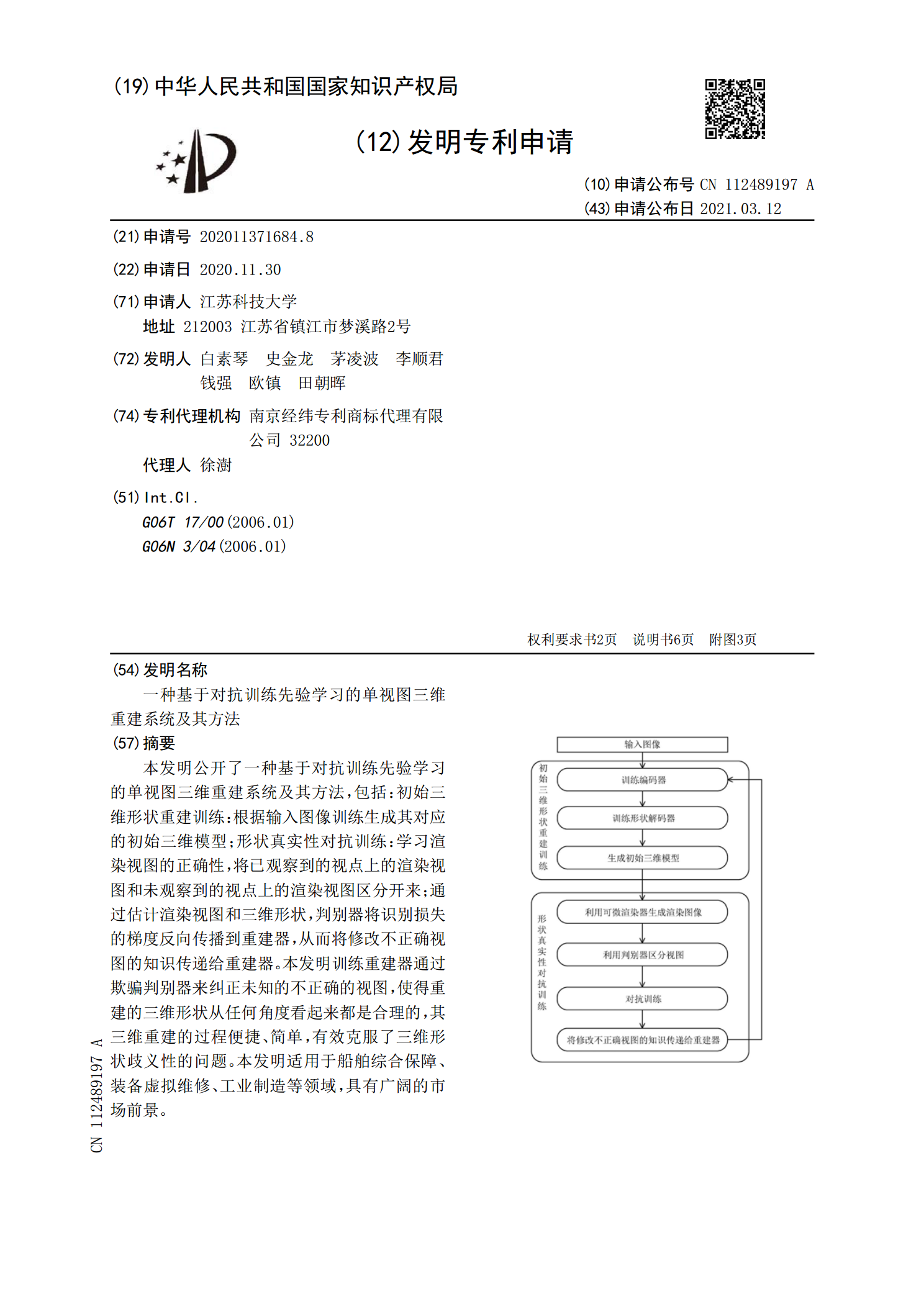
本发明公开了一种基于对抗训练先验学习的单视图三维重建系统及其方法,包括:初始三维形状重建训练:根据输入图像训练生成其对应的初始三维模型;形状真实性对抗训练:学习渲染视图的正确性,将已观察到的视点上的渲染视图和未观察到的视点上的渲染视图区分开来;通过估计渲染视图和三维形状,判别器将识别损失的梯度反向传播到重建器,从而将修改不正确视图的知识传递给重建器。本发明训练重建器通过欺骗判别器来纠正未知的不正确的视图,使得重建的三维形状从任何角度看起来都是合理的,其三维重建的过程便捷、简单,有效克服了三维形状歧义性的问

一种基于深度学习的单视图三维重建方法.pdf
本发明公开了一种基于深度学习的单视图三维重建方法,首先对二维图像进行特征提取,并深度估计得到一个新的二维特征,把提取的二维特征与估计出的二维特征进行融合生成2×2×2尺寸的三维特征。其次,使用三线性空间上采样和三维反卷积网络分别从粗粒度和细粒度两个方面融合生成三维特征,可以较好的实现目标的三维特征重建,并且可以加快深度学习模型的收敛速度。实验结果表明,本发明模型的平均准确率比3D‑R2N2高10.7%,比Pix2Vox高0.6%,并具有较好的泛化能力。此外,在向后推理时间方面,本发明模型的重建速度比3D‑
一种基于对抗训练的联邦学习隐私保护方法及系统.pdf
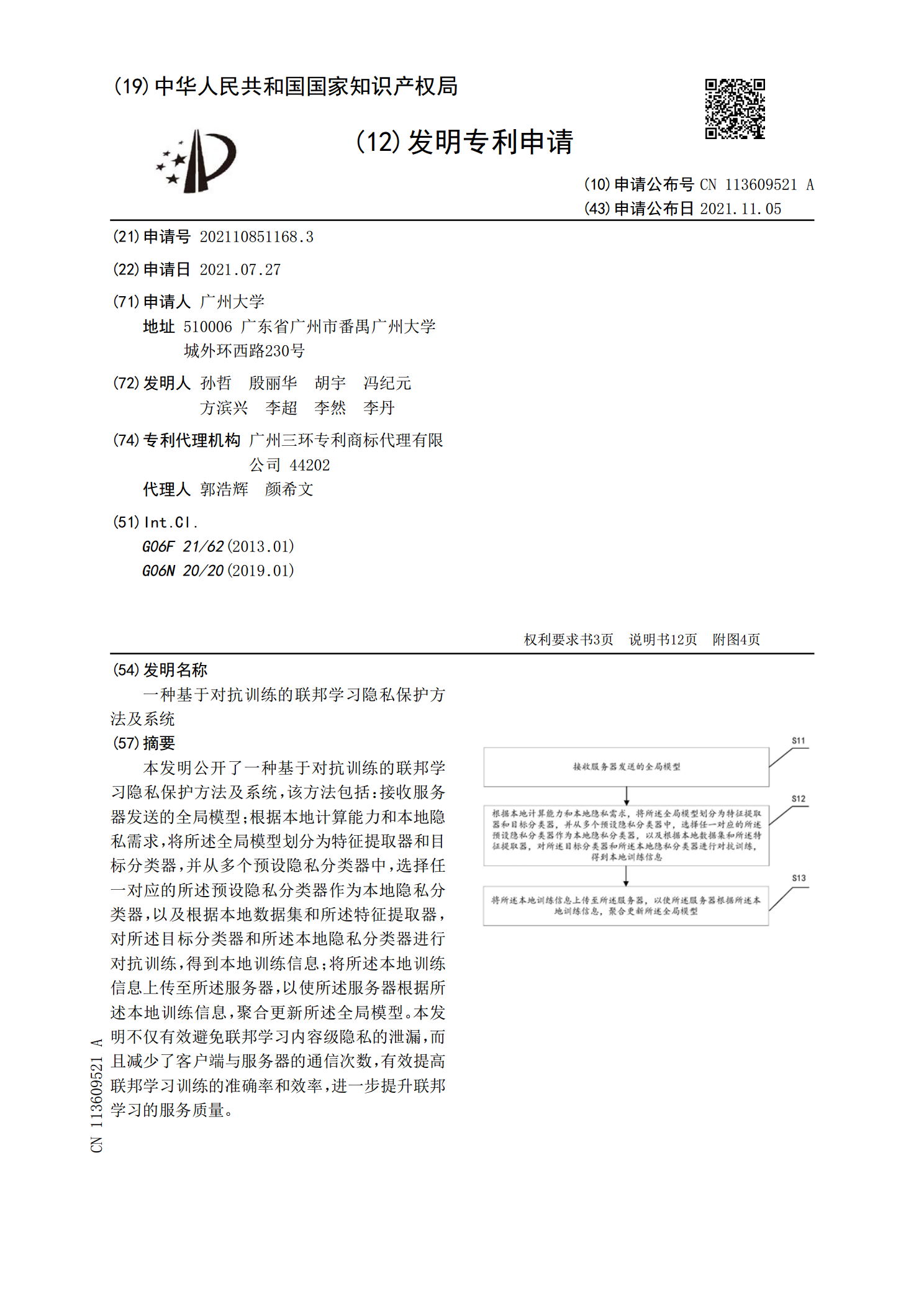
本发明公开了一种基于对抗训练的联邦学习隐私保护方法及系统,该方法包括:接收服务器发送的全局模型;根据本地计算能力和本地隐私需求,将所述全局模型划分为特征提取器和目标分类器,并从多个预设隐私分类器中,选择任一对应的所述预设隐私分类器作为本地隐私分类器,以及根据本地数据集和所述特征提取器,对所述目标分类器和所述本地隐私分类器进行对抗训练,得到本地训练信息;将所述本地训练信息上传至所述服务器,以使所述服务器根据所述本地训练信息,聚合更新所述全局模型。本发明不仅有效避免联邦学习内容级隐私的泄漏,而且减少了客户端与
一种基于梯度先验的高效黑盒对抗攻击方法.pdf
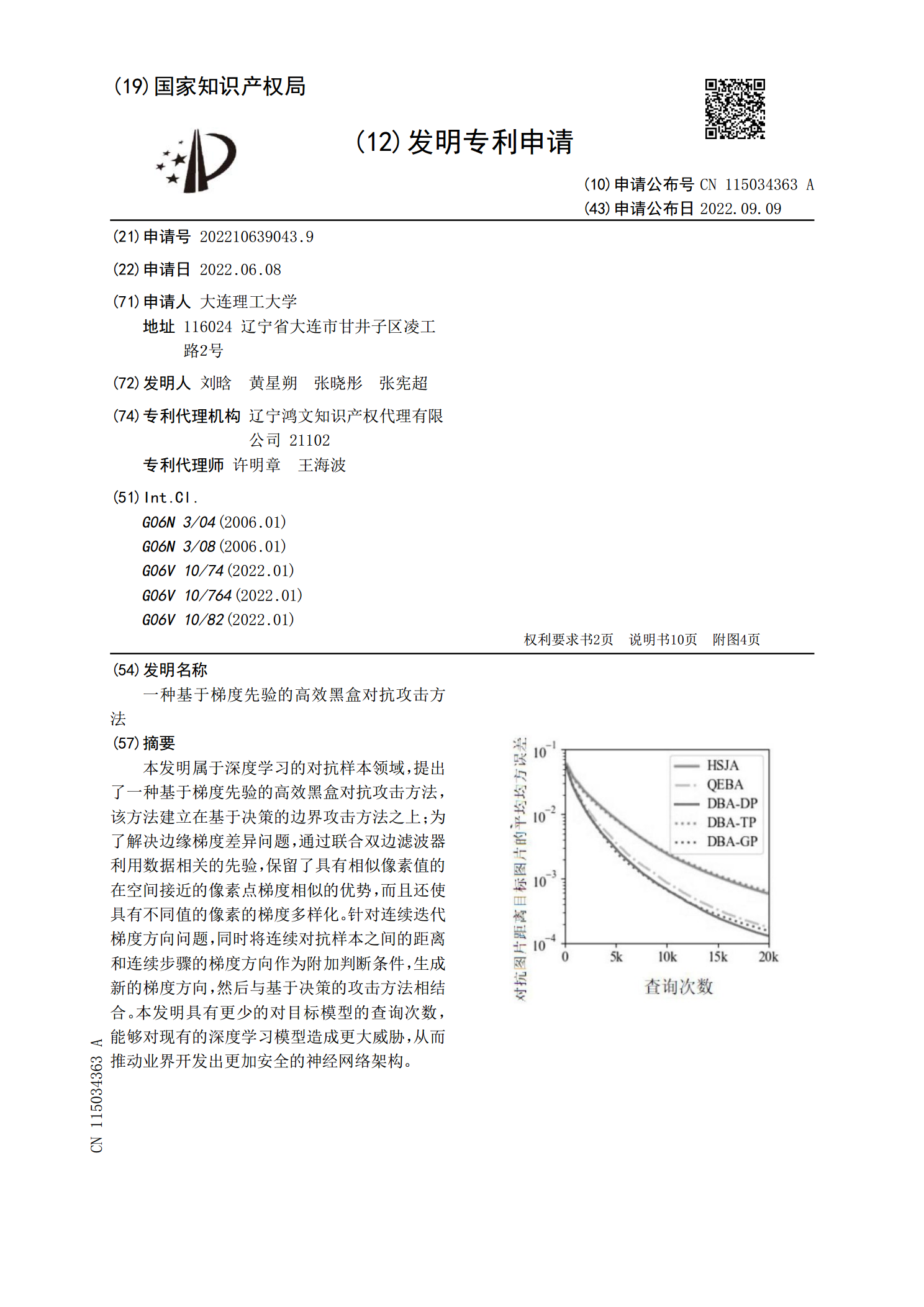
本发明属于深度学习的对抗样本领域,提出了一种基于梯度先验的高效黑盒对抗攻击方法,该方法建立在基于决策的边界攻击方法之上;为了解决边缘梯度差异问题,通过联合双边滤波器利用数据相关的先验,保留了具有相似像素值的在空间接近的像素点梯度相似的优势,而且还使具有不同值的像素的梯度多样化。针对连续迭代梯度方向问题,同时将连续对抗样本之间的距离和连续步骤的梯度方向作为附加判断条件,生成新的梯度方向,然后与基于决策的攻击方法相结合。本发明具有更少的对目标模型的查询次数,能够对现有的深度学习模型造成更大威胁,从而推动业界开

基于深度学习的单视图三维重建方法的研究进展.docx
基于深度学习的单视图三维重建方法的研究进展摘要:单视图三维重建是计算机视觉领域的一个重要问题,具有很强的实际应用价值。在深度学习技术的推动下,单视图三维重建取得了巨大的进展。本文对单视图三维重建及其深度学习方法进行了综述,介绍了基于深度学习的单视图三维重建的研究进展、主要方法和应用领域,并探讨了存在的问题和未来的研究方向。关键词:单视图三维重建;深度学习;研究进展;方法;应用一、引言单视图三维重建是计算机视觉领域的一个经典问题,其目的是从单张图像中恢复出三维物体的形状、大小和位置等信息。单视图三维重建技术