
一种基于神经网络模型的单视图光照估计方法.pdf

是你****馨呀

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于神经网络模型的单视图光照估计方法.pdf
本发明公开的基于神经网络模型的单视图光照估计方法,涉及光照估计技术领域,通过使用平面检测神经网络模型对输入的二维图像中的各个平面进行标注,投射至三维空间内,生成三维点云,基于平面三维模型构建相应的能量方程,利用增强拉格朗日求解器迭代并优化该能量方程,得到平面三维模型表面的总体光照向量。利用第一自编码神经网络模型提取平面三维模型的光照深度特征;利用第二自编码网络模型提取目标虚拟物体的光照深度特征;利用生成对抗神经网络模型将平面三维模型的光照深度特征通过领域适应的形式迁移至目标虚拟物体上,得到虚拟物体对应的光
一种基于神经网络的图像光照估计方法.pdf
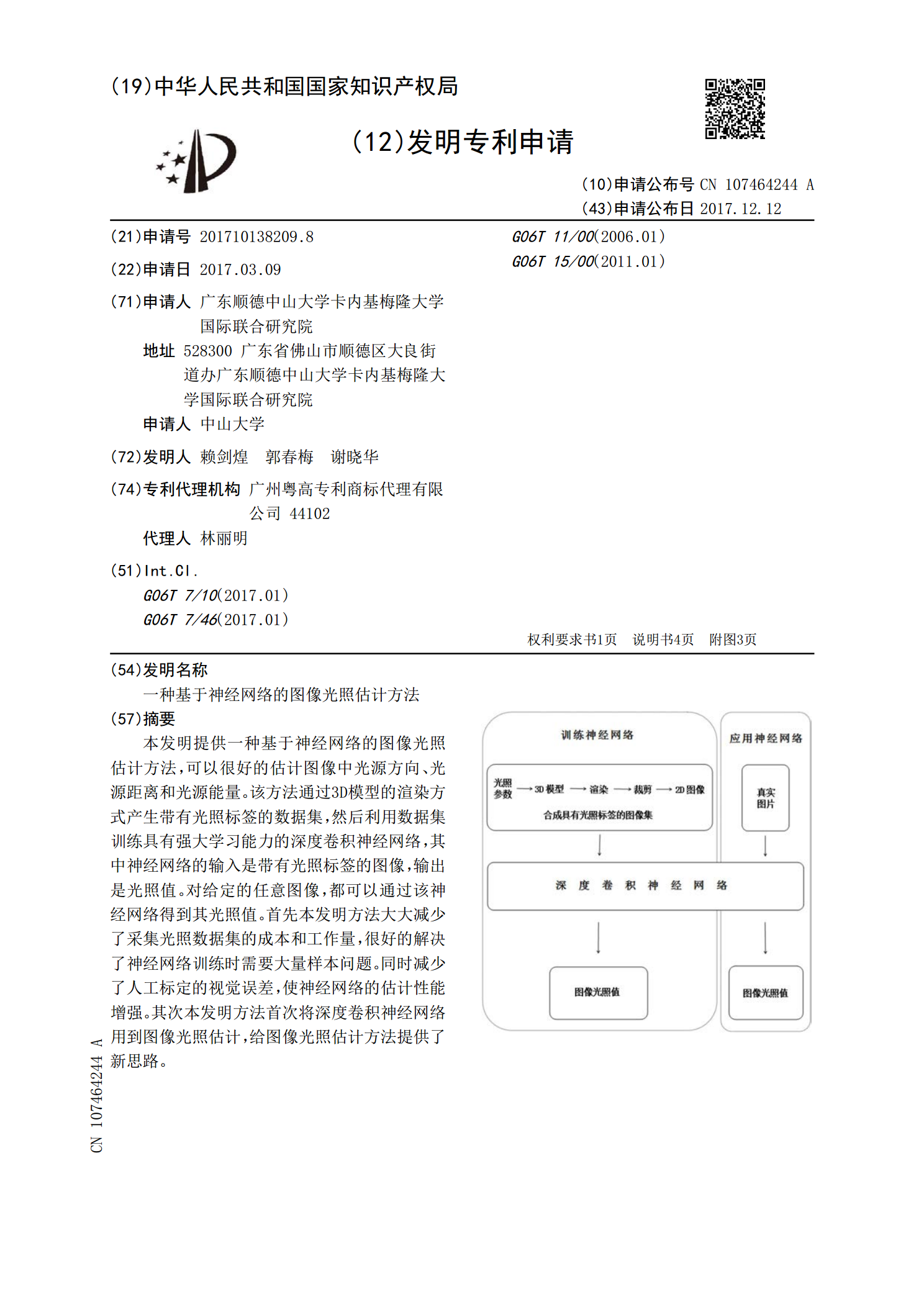
本发明提供一种基于神经网络的图像光照估计方法,可以很好的估计图像中光源方向、光源距离和光源能量。该方法通过3D模型的渲染方式产生带有光照标签的数据集,然后利用数据集训练具有强大学习能力的深度卷积神经网络,其中神经网络的输入是带有光照标签的图像,输出是光照值。对给定的任意图像,都可以通过该神经网络得到其光照值。首先本发明方法大大减少了采集光照数据集的成本和工作量,很好的解决了神经网络训练时需要大量样本问题。同时减少了人工标定的视觉误差,使神经网络的估计性能增强。其次本发明方法首次将深度卷积神经网络用到图像光

一种基于单目移动RGB相机的光照估计方法.docx
一种基于单目移动RGB相机的光照估计方法基于单目移动RGB相机的光照估计方法摘要:光照估计在计算机视觉和图形学领域中具有重要的应用,可以用于增强图像和视频质量、提取场景深度信息以及实现增强现实等方面。本文提出了一种基于单目移动RGB相机的光照估计方法,该方法通过分析图像中的色彩和亮度信息,利用相机的移动和颜色信息,实现对光照条件的估计。实验结果表明,该方法可以有效地估计光照条件,并且在光照估计的精度和稳定性上具有优势。1.引言光照估计是计算机视觉和图形学领域中的一个重要研究课题。光照条件直接影响图像和视频
一种基于单目摄像机的光照估计方法.pdf
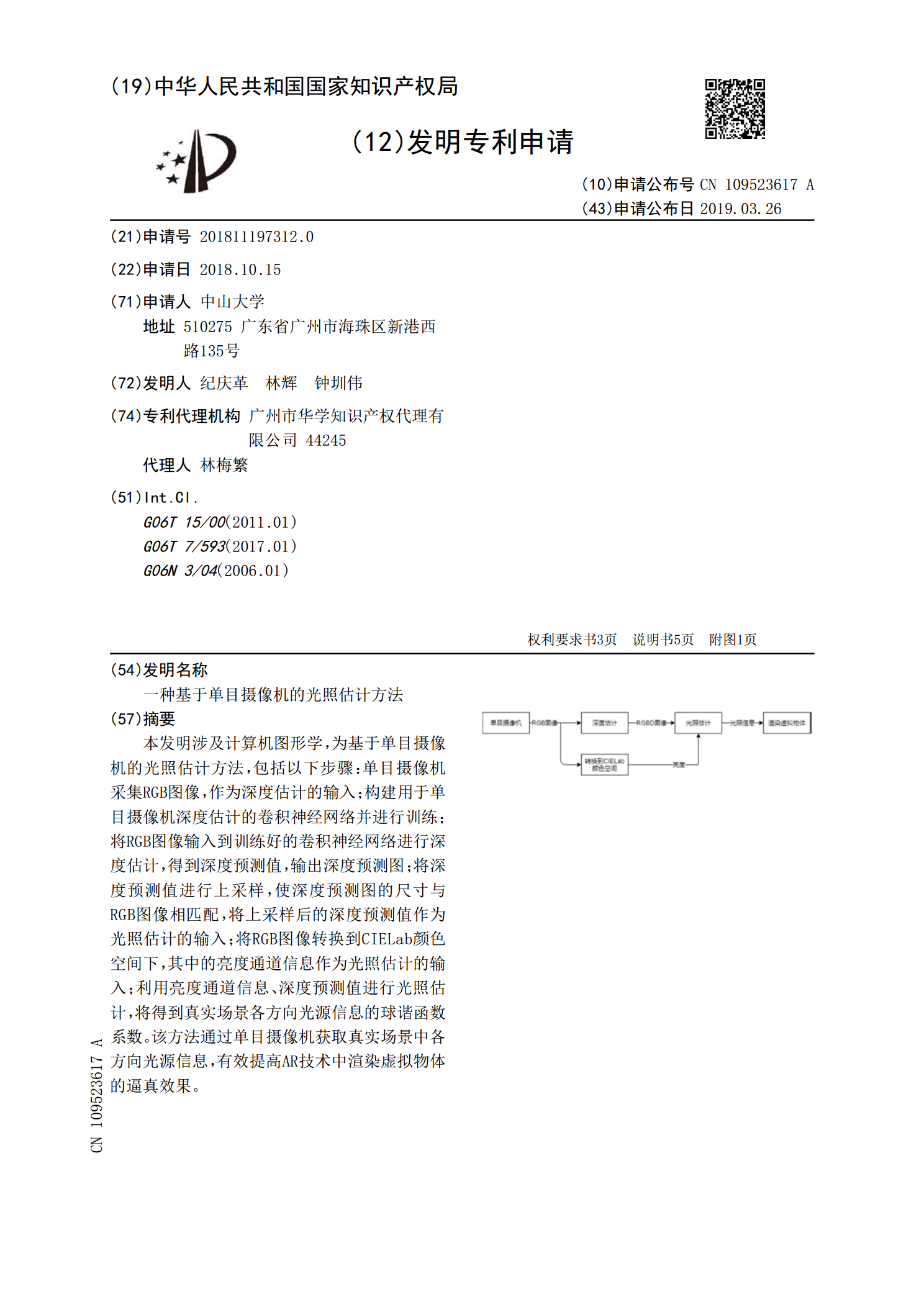
本发明涉及计算机图形学,为基于单目摄像机的光照估计方法,包括以下步骤:单目摄像机采集RGB图像,作为深度估计的输入;构建用于单目摄像机深度估计的卷积神经网络并进行训练;将RGB图像输入到训练好的卷积神经网络进行深度估计,得到深度预测值,输出深度预测图;将深度预测值进行上采样,使深度预测图的尺寸与RGB图像相匹配,将上采样后的深度预测值作为光照估计的输入;将RGB图像转换到CIELab颜色空间下,其中的亮度通道信息作为光照估计的输入;利用亮度通道信息、深度预测值进行光照估计,将得到真实场景各方向光源信息的球

一种基于神经网络的单光源场景光照重渲染方法及系统.pdf
本发明提出了一种基于神经网络的单光源场景光照重渲染方法及系统,包括以下步骤:对已有的图像场景光照数据集进行预处理;设计光照信息分类网络;设计内容自重建网络,为内容编码器单独构造一个完整的自编码网络;构建光照重渲染网络,光照重渲染网络由训练好的光照信息分类编码器、内容编码器和解码器组成,解码器将同时结合内容编码器和光照信息分类编码器所提供地特征进行图像特征还原;使用数据集对光照重渲染网络进行训练。基于该方法能提取处出所需的光照信息,而自重建网络使得其内部的内容编码器可以学习到足够多的图像内容特征,所以可以将