
基于云的相机标定.pdf

海昌****姐淑

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于云的相机标定.pdf
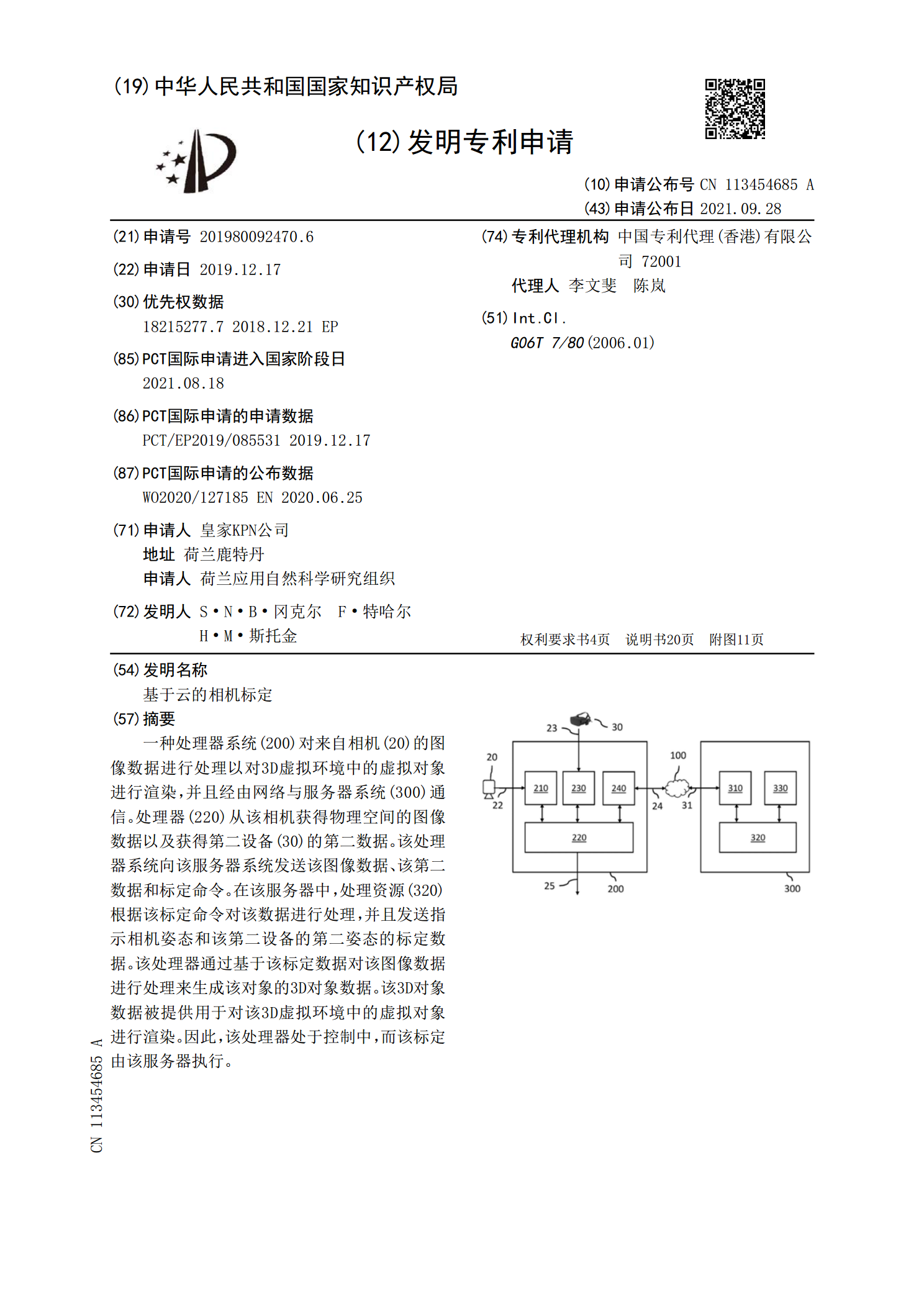
一种处理器系统(200)对来自相机(20)的图像数据进行处理以对3D虚拟环境中的虚拟对象进行渲染,并且经由网络与服务器系统(300)通信。处理器(220)从该相机获得物理空间的图像数据以及获得第二设备(30)的第二数据。该处理器系统向该服务器系统发送该图像数据、该第二数据和标定命令。在该服务器中,处理资源(320)根据该标定命令对该数据进行处理,并且发送指示相机姿态和该第二设备的第二姿态的标定数据。该处理器通过基于该标定数据对该图像数据进行处理来生成该对象的3D对象数据。该3D对象数据被提供用于对该3D虚

基于场景的相机自标定研究.docx
基于场景的相机自标定研究摘要随着计算机视觉和机器学习的发展,相机自标定在物体识别、场景分析和机器人导航等方面被广泛应用。本论文旨在介绍基于场景的相机自标定研究的现状、问题和应用,以及未来可能的发展方向。我们综合了国内外的相关研究成果,分析其中的优点和缺点,探讨其应用实践,希望为相机自标定的研究和实践提供一些有益的思考和启示。关键词:相机自标定、基于场景、物体识别、场景分析、机器人导航引言相机自标定是指在不依赖外界传感器的情况下,仅使用相机自己的数据和内部参数,估计出相机的内部和外部参数。其优点在于不受外部

基于相机标定的纹理映射方法.pptx
汇报人:目录PARTONE相机标定原理相机内外参数相机标定方法相机标定精度PARTTWO纹理映射原理纹理坐标系统纹理映射算法纹理映射效果PARTTHREE方法概述相机标定与纹理映射的关联实现步骤优势与局限性PARTFOUR应用领域实际效果展示与其他方法的比较适用范围与限制PARTFIVE当前研究的不足之处未来研究重点与方向技术发展趋势与展望THANKYOU

基于旋转对称模板的相机标定.docx
基于旋转对称模板的相机标定基于旋转对称模板的相机标定摘要:相机标定是计算机视觉领域中一个重要的任务,它在计算机视觉、图像处理、机器人等领域具有广泛的应用。本文提出了一种基于旋转对称模板的相机标定方法。该方法通过使用旋转对称模板,对相机进行标定,从而提高了标定的准确性和可靠性。实验结果表明,该方法在标定精度上具有较好的性能,并且具有较好的实用性。1.引言相机标定是计算机视觉领域中的一个重要问题,旨在确定相机内部参数(如焦距、畸变系数等)和外部参数(如旋转矩阵、平移向量等),从而使得相机能够准确地捕捉并处理图
基于彩色编码相移条纹的相机标定.pptx
汇报人:/目录0102彩色编码相移条纹技术的原理彩色编码相移条纹技术的特点彩色编码相移条纹技术的应用场景03相机标定技术的原理相机标定技术的分类相机标定技术的应用场景04基于彩色编码相移条纹的相机标定原理基于彩色编码相移条纹的相机标定步骤基于彩色编码相移条纹的相机标定精度评估05实验设置与实验环境实验过程与实验数据实验结果与分析结果与现有技术的比较06基于彩色编码相移条纹的相机标定的优势与局限性基于彩色编码相移条纹的相机标定的未来发展方向汇报人: