
相机路径绘制方法和基于相机路径绘制的渲染交互系统.pdf

fa****楠吖


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
相机路径绘制方法和基于相机路径绘制的渲染交互系统.pdf
本发明公开了一种相机路径绘制方法,采用三阶贝塞尔曲线拟合进行相机路径的分段拟合,同时为保证拟合相机路径过关键点,且每段相机路径在公共关键点上连接,设定了约束条件,基于该约束条件并结合关键点坐标,对三阶贝塞尔曲线进行拟合求解,这样能够快速且准确地获得相机运动路径。还公开了一种基于相机路径绘制的渲染交互系统,在利用通过三阶贝塞尔曲线拟合确定相机路径基础上,结合用户通过客户端输入的相机运动参数和图像数量相关参数,沿着整条相机路径进行场景渲染,以生成渲染图像,这样得到符合用户预期的各视角渲染图像,同时客户端还实时
使用多相机和深度相机阵列的基于图像的图像渲染方法和系统.pdf
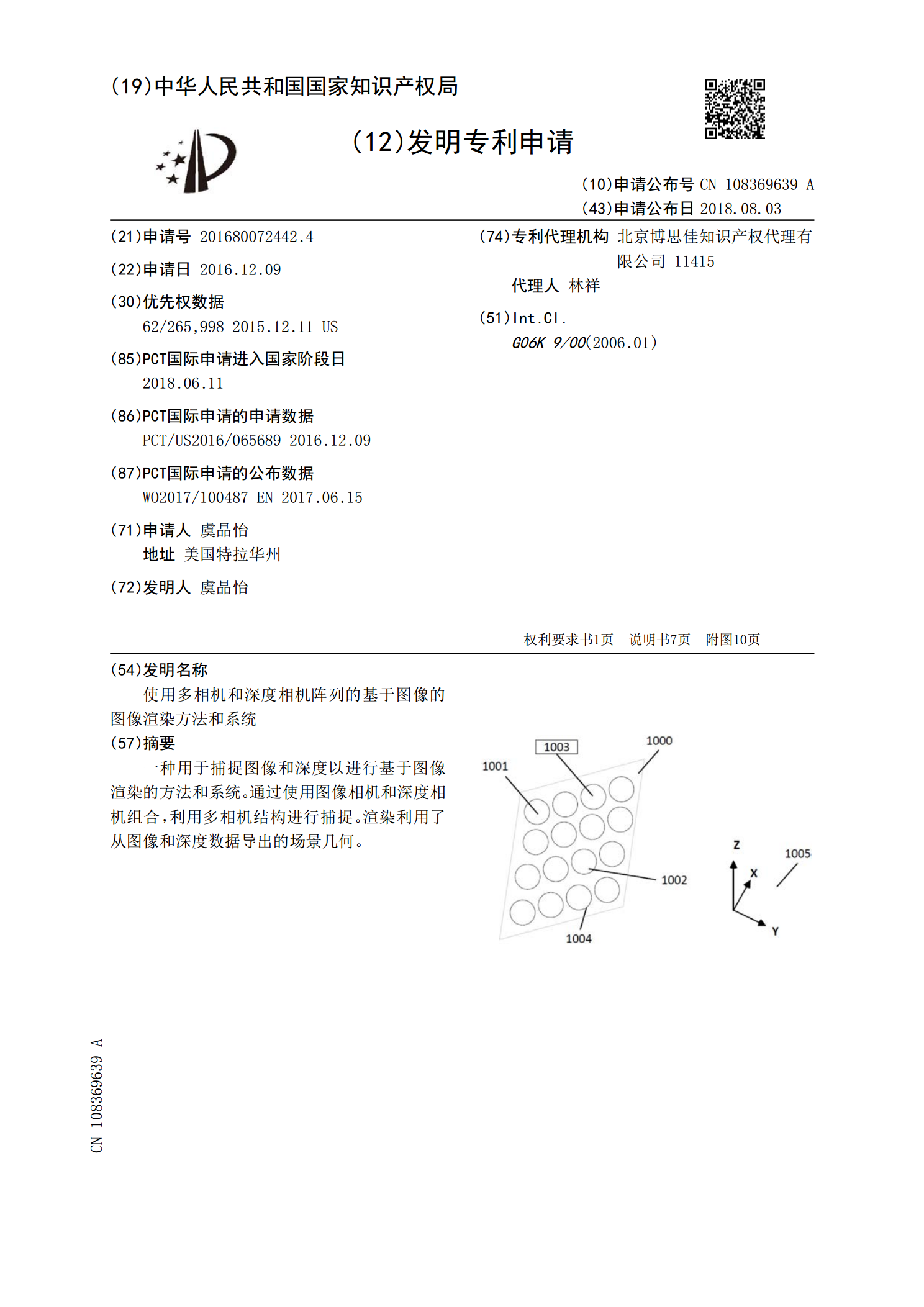
一种用于捕捉图像和深度以进行基于图像渲染的方法和系统。通过使用图像相机和深度相机组合,利用多相机结构进行捕捉。渲染利用了从图像和深度数据导出的场景几何。

一种基于多相机的快速反射绘制方法.pdf
本发明涉及一种基于多相机的快速反射绘制方法,该方法包括以下步骤:在当前视点下,对场景进行直接绘制,获取多个渲染结果,对渲染结果像素按法线聚类,分别为每个聚类生成传统相机模型,并依据生成的相机模型绘制整个场景,最后依据绘制的图像代理贴图进行深度求交运算,混合生成反射效果。本方法借助GPU强大的计算能力,极大提高了渲染速度和效率。

ps路径的绘制.ppt
PhotoShopCS平面设计教程导入第一节路径的绘制课堂的导入返回返回路径的作用路径工具路径的绘制叶子绘制实训作业实训图片小结和作业布置谢谢观看!

矢量图形和路径的绘制.pptx
1矢量图形和路径的概述绘图模式创建矢量图形和路径创建矢量图形和路径的工具钢笔工具两种路径的绘制:1.创建闭合路径:在绘制路径结束时将鼠标指针放至起到锚点处,单击鼠标左键或拖动鼠标即可创建闭合路径。2.创建开放路径:在绘制路径结束时,按住Ctrl键,鼠标指针变成直接选择工具,此时单击路径以外的任意位置即可结束该路径的绘制;或者按Esc键终止当前路径的绘制,也可以创建一条开放路径。绘制曲线路径:选取钢笔工具,确定路径的起始位置单击鼠标左键,按住鼠标左键进行拖动,此时出现第一个锚点,从锚点中拖出方向线,拖动方向