
地图生成方法、装置、电子设备及存储介质.pdf

慧红****ad


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
地图生成方法、装置、电子设备及存储介质.pdf
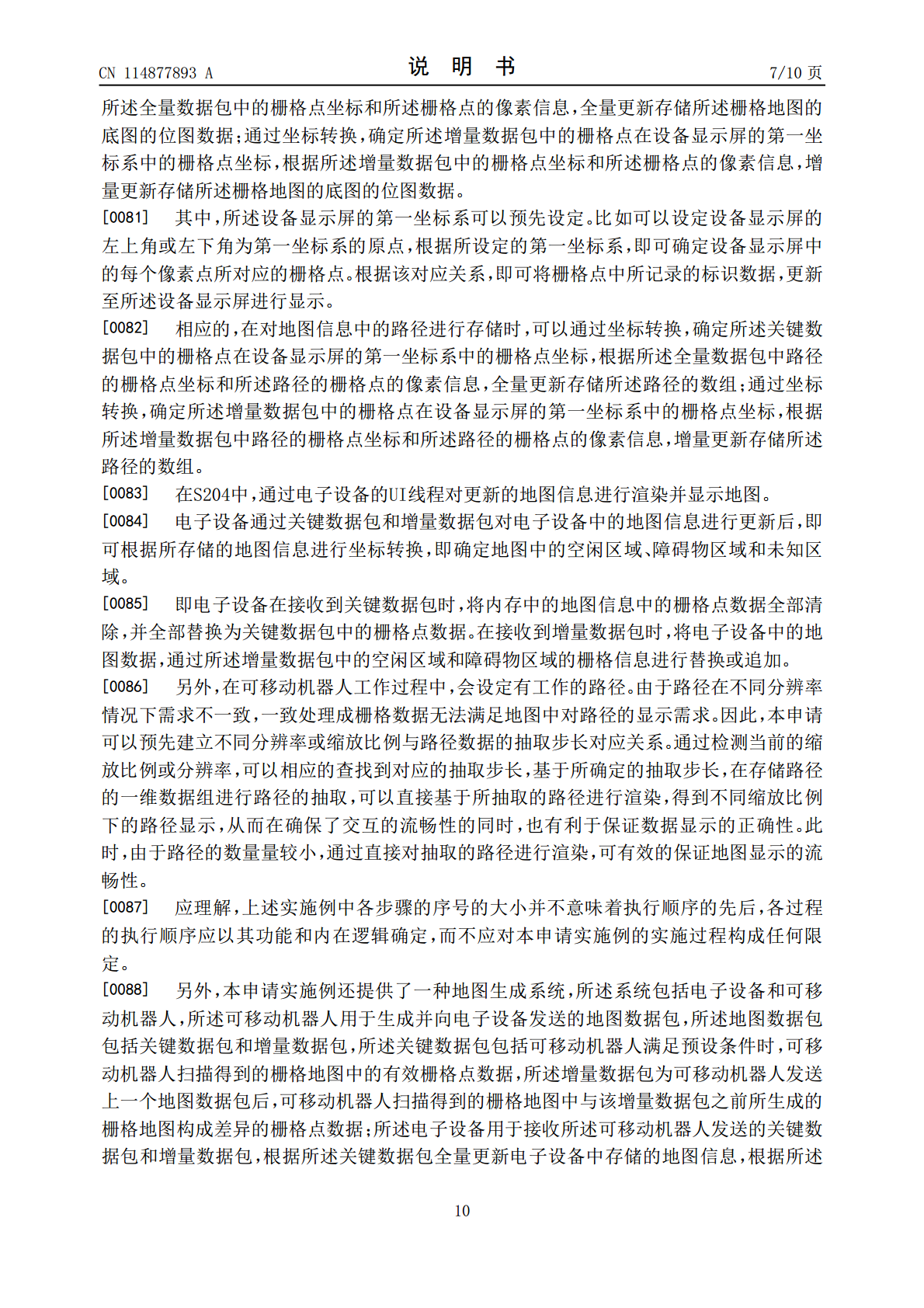
本申请属于可移动机器人地图数据处理领域,提出了一种地图生成方法、装置、电子设备及存储介质,该方法包括:获取可移动机器人返回栅格地图的地图数据包,所述地图数据包包括的关键数据包和增量数据包;通过坐标转换,由所述关键数据包全量更新电子设备中存储的地图信息,由所述增量数据包增量更新所述电子设备中存储的地图信息;通过电子设备的UI线程对更新的地图信息进行渲染并显示地图。通过关键数据包和增量数据包进行地图更新,可有效的节省地图更新流量,并且电子设备对栅格点数据进行渲染生成地图,可有效的提供地图的生成效率。
游戏地图的生成方法、装置、电子设备及存储介质.pdf
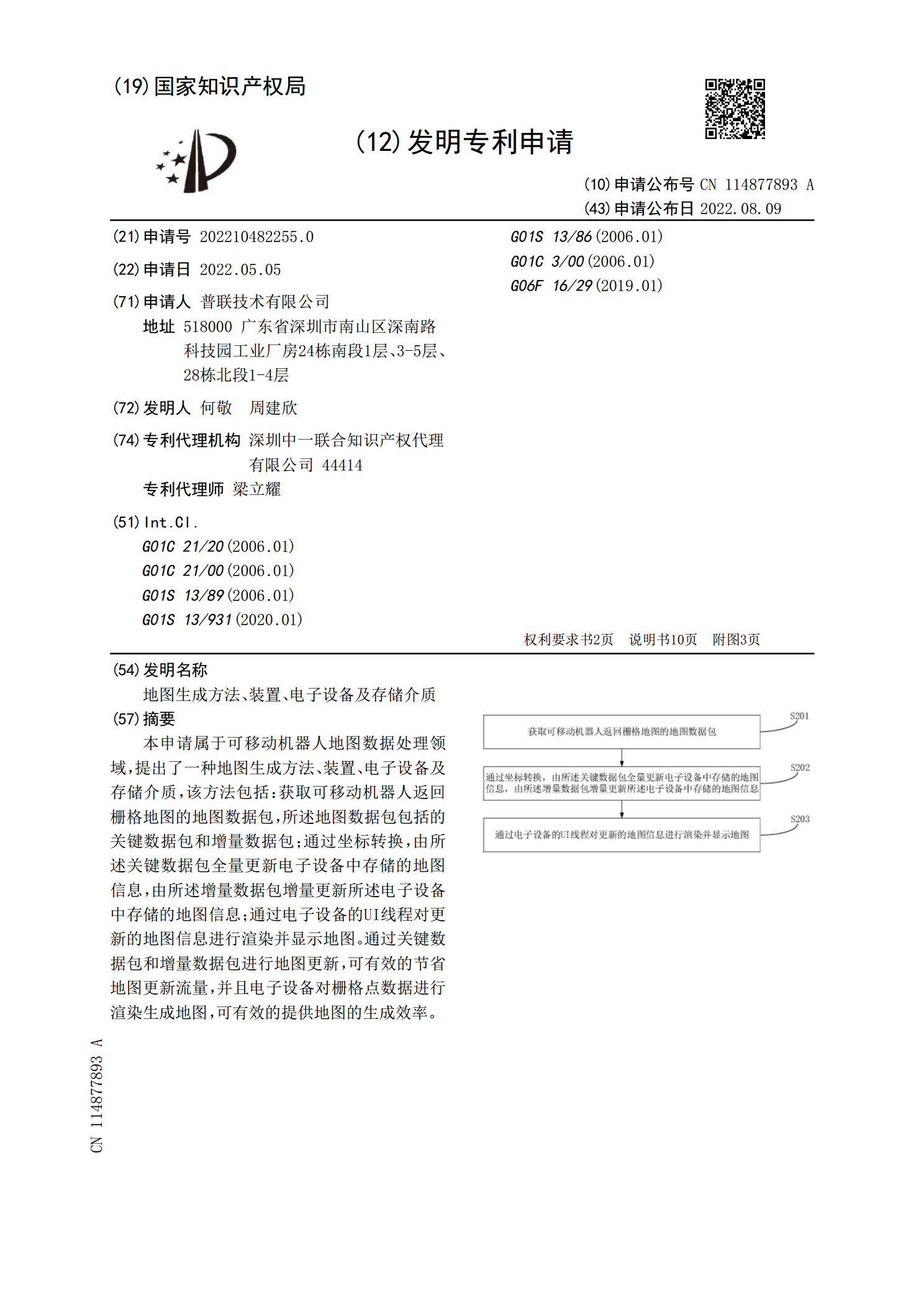
本申请属于计算机技术领域,具体涉及一种游戏地图的生成方法、装置、电子设备以及存储介质。该方法包括:在游戏显示界面中需显示新的纹理资源时,根据游戏世界中待显示的三维对象在所述游戏世界中的位置,生成共享纹理资源;在缩略地图显示界面中加载与所述位置对应的缩略地图纹理资源时,对所述共享纹理资源进行缩放,生成所述位置对应的缩略地图纹理资源;于所述缩略地图显示界面中加载所述缩略地图纹理资源。本申请能够在游戏地图更新的过程中,降低生成地图所耗费的性能。

地图数据生成方法、装置、电子设备及存储介质.pdf
本公开提供了一种地图数据生成方法、装置、电子设备及存储介质,涉及计算机技术领域,具体涉及智能交通、自动驾驶等人工智能技术领域,包括:响应于第一车辆的驾驶场景中发生设定事件,确定与设定事件对应的发生位置区域,并获取第一车辆在发生位置区域中的第一轨迹信息,以及根据第一轨迹信息,生成与发生位置区域对应的目标地图数据,由于是在第一车辆的驾驶场景中发生设定事件时,根据发生位置区域的第一轨迹信息,生成发生位置区域对应的目标地图数据,从而能够有效地缩减地图更新的周期,且能够在保障地图新鲜度的同时,有效地避免对车辆驾驶场

虚拟地图生成方法、装置、电子设备及存储介质.pdf
本公开提供了一种虚拟地图生成方法、装置、电子设备及存储介质,属于计算机技术领域。方法包括:获取虚拟地图中地图区域的区域数量、虚拟装饰物模板及地图区域的地图区域信息,创建区域数量的地图区域;基于多个地块模板及第一约束信息,在每个地图区域中生成至少一个地块;基于虚拟装饰物模板,在适用的地图区域包含的地块中添加虚拟装饰物,由该区域数量的地图区域构成虚拟地图。本公开提供了一种生成虚拟地图的方式,在创建的地图区域中,基于用于生成不同尺寸地块的多个地块模板及第一约束信息生成地块,并基于虚拟装饰物模板在地块中添加虚拟装

点云地图生成方法、装置、电子设备及存储介质.pdf
本公开涉及点云地图生成方法、装置、电子设备及存储介质,其方法包括:基于待处理点云数据生成第一点云地图;获取第一点云地图中的目标特征区域;基于目标特征区域的区域类型和目标特征区域包含的至少一部分点云的位姿信息,确定目标特征区域的误差;通过目标特征区域的误差优化目标特征区域中目标帧点云的位姿信息;基于位姿优化后的所述待处理点云数据生成第二点云地图。本公开实施例中由于对待处理点云数据中位姿信息的置信度小于置信度阈值的点云进行位姿优化,使得基于优化后的点云数据生成的第二点云地图的精度更高。