
主从式遥微操作机器人力反馈控制系统的研究.pdf

婀娜****aj


1/6

2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
主从式遥微操作机器人力反馈控制系统的研究.pdf
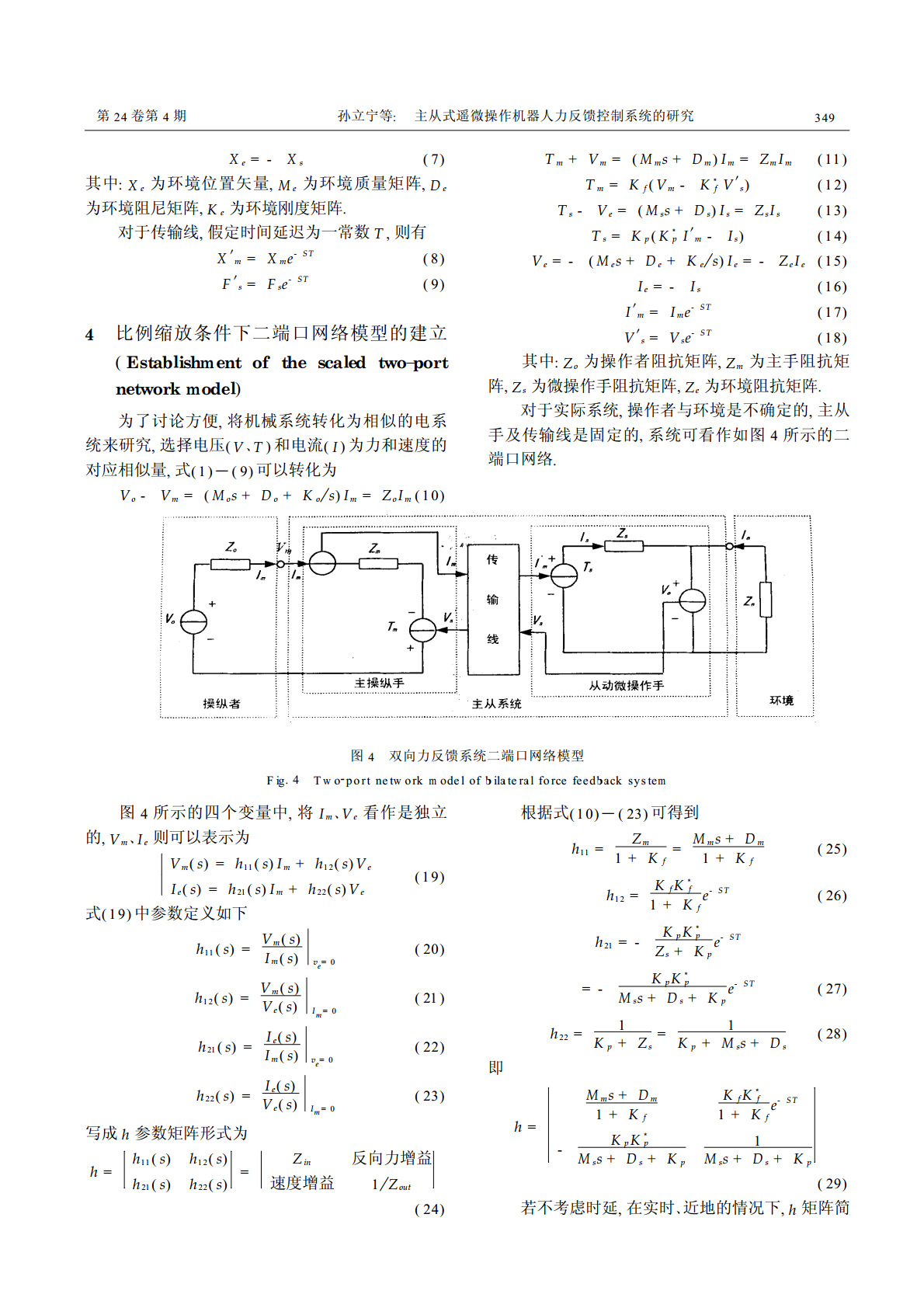
第��卷第�期机器人∂��������������年�月ΡΟΒΟΤ�∏�������文章编号�����2������������2����2��主从式遥微操作机器人力反馈控制系统的研究Ξ孙立宁荣伟彬刘品宽蔡鹤皋�哈尔滨工业大学机器人研究所哈尔滨�������摘要�本文研制出遥微操作机器人力反馈控制系统�建立了比例缩放条件下系统的二端口网络模型�并对控制系统的稳定性进行了分析�最后进行了实验研究�实验结果表明�在与物体接触时�操作者能够获得持续而稳定的接触力感觉�为进一步的微操作实验研究奠定了基础�关键词�

主从式遥微操作机器人力反馈控制系统的研究.pdf
第��卷第�期机器人∂��������������年�月ΡΟΒΟΤ�∏�������文章编号�����2������������2����2��主从式遥微操作机器人力反馈控制系统的研究Ξ

带力觉反馈的主从式遥微操作系统研制与实验研究的开题报告.docx
带力觉反馈的主从式遥微操作系统研制与实验研究的开题报告一、选题背景及意义随着机器人技术的不断发展和普及,遥操作系统也变得愈发重要。然而,在现有的主从式遥操作系统中,操作者难以感知到机器人运动的真实环境和机器人受到的外部力量,从而使得操作效率和精度受到限制。为了解决这一问题,将力觉反馈技术引入主从式遥操作系统中,可以让操作者能够更加真实地感受到机器人运动的情况和外部环境所产生的力量变化,从而提高操作效率和精度,减少操作失误的发生。本研究旨在针对上述问题,研制并实验验证一种带有力觉反馈的主从式遥操作系统,为相
主从式遥操作配网带电作业机器人研究.pptx
汇报人:CONTENTS添加章节标题主从式遥操作配网带电作业机器人概述机器人的定义和功能机器人研究背景和意义机器人的应用场景和优势主从式遥操作配网带电作业机器人系统组成主控制系统从动机械系统通信系统安全保护系统主从式遥操作配网带电作业机器人关键技术远程控制技术机械臂运动学与动力学建模机器人自主定位与导航机器人视觉识别与处理主从式遥操作配网带电作业机器人应用案例实际应用场景介绍机器人操作流程和效果案例分析与实践经验总结主从式遥操作配网带电作业机器人发展趋势与展望技术发展趋势市场前景展望未来研究方向与挑战汇报

主从式遥操作配网带电作业机器人研究.docx
主从式遥操作配网带电作业机器人研究Name:Main-slaveRemoteControlPowerGridOperationRobotAbstractThepowergridindustryhasenteredastageofbroadautomation,andremotecontrolplaysanessentialroleinpowergridoperations.Inthisstudy,weproposeamain-slaveremotecontrolpowergridoperationrobo