
一种基于Stewart 并联机构的腋下智能按摩装置.pdf

丹烟****魔王


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于Stewart 并联机构的腋下智能按摩装置.pdf
本发明涉及一种基于Stewart并联机构的腋下智能按摩装置,包括Stewart并联机构、按摩外罩、传动滚珠、挡圈和送风装置,按摩外罩位于Stewart并联机构正上方,按摩外罩外表面上分别均匀设置有振动按摩头和透风孔,振动按摩头和透风孔两两交错布置,挡圈位于按摩外罩外侧,且挡圈与Stewart并联机构相固定,传动滚珠均匀安装在挡圈和按摩外罩之间。本发明可对人体腋下进行推拿按摩和风冷散汗,且按摩效果明显,按摩舒适度高,对人体腋下起到了很好的保健作用;其采用6?SPS的Stewart并联机构,承载能力强且微动精

一种人体腋下局部按摩装置.pdf
本发明涉及一种人体腋下局部按摩装置,包括支架、固定轴、局部按摩头、支撑轴、固定环、振动电机和振动弹簧,支架分别对称布置在局部按摩头两侧,且局部按摩头和支架上端之间通过固定轴进行连接,支撑轴位于局部按摩头正下方,振动电机位于支撑轴正上方,且振动电机均匀沿支撑轴轴向方向呈直线布置,振动电机下端通过固定环安装在支撑轴上,振动电机上端与振动弹簧一端相连接,振动弹簧另一端与局部按摩头内侧壁相连接。本发明通过振动电机的振动带动振动弹簧的抖动,从而实现局部按摩头的振动,起到了振动按摩的效果,局部按摩装置主要用于对人体腋

一种基于柔顺Stewart并联机构的连续体机器人.pdf
一种基于柔顺Stewart并联机构的连续体机器人,包括作为主体结构的柔顺骨架和驱动系统。柔顺骨架由多个柔顺Stewart并联机构为基本组成单元串联而成,具有6个自由度,实现连续体机器人的各种动作和姿态。驱动系统用于驱动柔顺骨架发生特定形变,按照驱动系统作用段将整个连续体机器人分成若干段,每一段称为一个柔顺机构组,每个柔顺机构组包括若干个串联在一起的柔顺Stewart并联机构,每个柔顺机构组配置一套驱动系统。本发明连续体机器人灵活度更高;结构简单,柔顺骨架可以通过3D打印整体加工,便于一体化小型化;扭转外力
一种基于冗余驱动双并联机构臀部按摩机器人用按摩装置.pdf
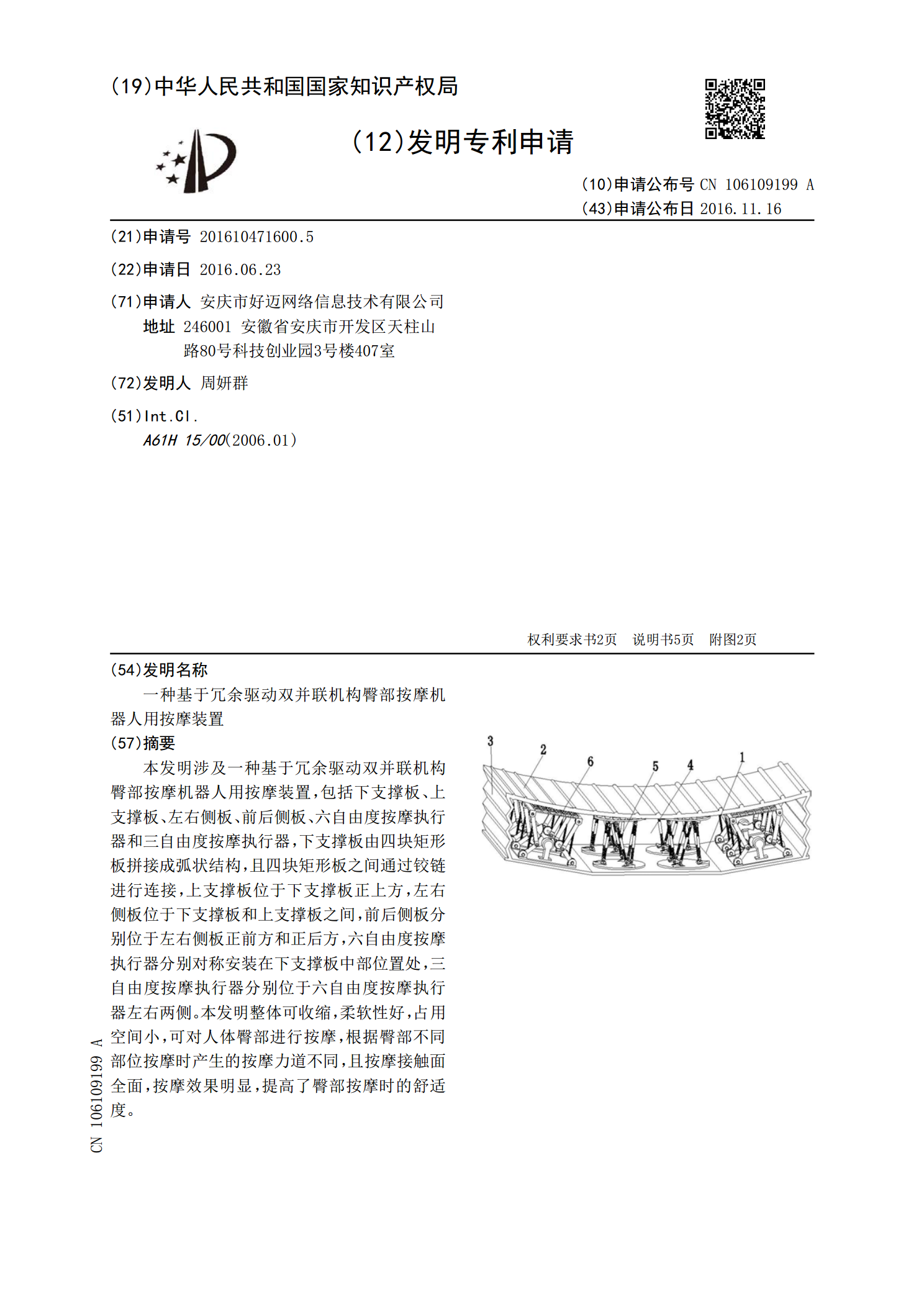
本发明涉及一种基于冗余驱动双并联机构臀部按摩机器人用按摩装置,包括下支撑板、上支撑板、左右侧板、前后侧板、六自由度按摩执行器和三自由度按摩执行器,下支撑板由四块矩形板拼接成弧状结构,且四块矩形板之间通过铰链进行连接,上支撑板位于下支撑板正上方,左右侧板位于下支撑板和上支撑板之间,前后侧板分别位于左右侧板正前方和正后方,六自由度按摩执行器分别对称安装在下支撑板中部位置处,三自由度按摩执行器分别位于六自由度按摩执行器左右两侧。本发明整体可收缩,柔软性好,占用空间小,可对人体臀部进行按摩,根据臀部不同部位按摩时

基于调整步长牛顿法的Stewart并联机构位置正解.docx
基于调整步长牛顿法的Stewart并联机构位置正解标题:基于调整步长牛顿法的Stewart并联机构位置正解的研究摘要:Stewart并联机构是一种具有广泛应用前景的并联机器人结构,能够实现高精度的位置控制。然而,其位置正解问题在实际应用中依然存在一定挑战。为了提高位置正解的收敛精度和速度,本文提出了一种基于调整步长的牛顿法,通过优化步长策略来改进传统的牛顿法。通过对Stewart并联机构的位置正解问题进行研究和分析,验证了该方法在提高收敛性能方面的有效性。关键词:Stewart并联机构;位置正解;调整步长