
一种基于柔顺Stewart并联机构的连续体机器人.pdf

山柳****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于柔顺Stewart并联机构的连续体机器人.pdf
一种基于柔顺Stewart并联机构的连续体机器人,包括作为主体结构的柔顺骨架和驱动系统。柔顺骨架由多个柔顺Stewart并联机构为基本组成单元串联而成,具有6个自由度,实现连续体机器人的各种动作和姿态。驱动系统用于驱动柔顺骨架发生特定形变,按照驱动系统作用段将整个连续体机器人分成若干段,每一段称为一个柔顺机构组,每个柔顺机构组包括若干个串联在一起的柔顺Stewart并联机构,每个柔顺机构组配置一套驱动系统。本发明连续体机器人灵活度更高;结构简单,柔顺骨架可以通过3D打印整体加工,便于一体化小型化;扭转外力

一种基于Stewart 并联机构的腋下智能按摩装置.pdf
本发明涉及一种基于Stewart并联机构的腋下智能按摩装置,包括Stewart并联机构、按摩外罩、传动滚珠、挡圈和送风装置,按摩外罩位于Stewart并联机构正上方,按摩外罩外表面上分别均匀设置有振动按摩头和透风孔,振动按摩头和透风孔两两交错布置,挡圈位于按摩外罩外侧,且挡圈与Stewart并联机构相固定,传动滚珠均匀安装在挡圈和按摩外罩之间。本发明可对人体腋下进行推拿按摩和风冷散汗,且按摩效果明显,按摩舒适度高,对人体腋下起到了很好的保健作用;其采用6?SPS的Stewart并联机构,承载能力强且微动精

连续体结构的柔顺机构拓扑优化设计.docx
连续体结构的柔顺机构拓扑优化设计连续体结构的柔顺机构在工程设计中十分常见,可以解决多种复杂机械结构中的问题。柔顺机构能够自适应地变形,能够减少外部外力导致的应力集中,并能够提高系统的可靠性。在实际应用中,柔顺机构不仅能够节约材料,还能够减少生产成本,提高系统的性能表现。因此,针对连续体结构的柔顺机构拓扑优化设计具有十分重要的意义。首先,需要了解什么是拓扑优化设计。拓扑优化是一种通过优化结构的拓扑形态,来提高系统结构性能的设计方法。该方法利用计算机辅助设计软件对待设计的结构进行分析、模拟,进而得出最优结构拓
一种基于Stewart 并联机构的焊接机器人焊接机械手.pdf
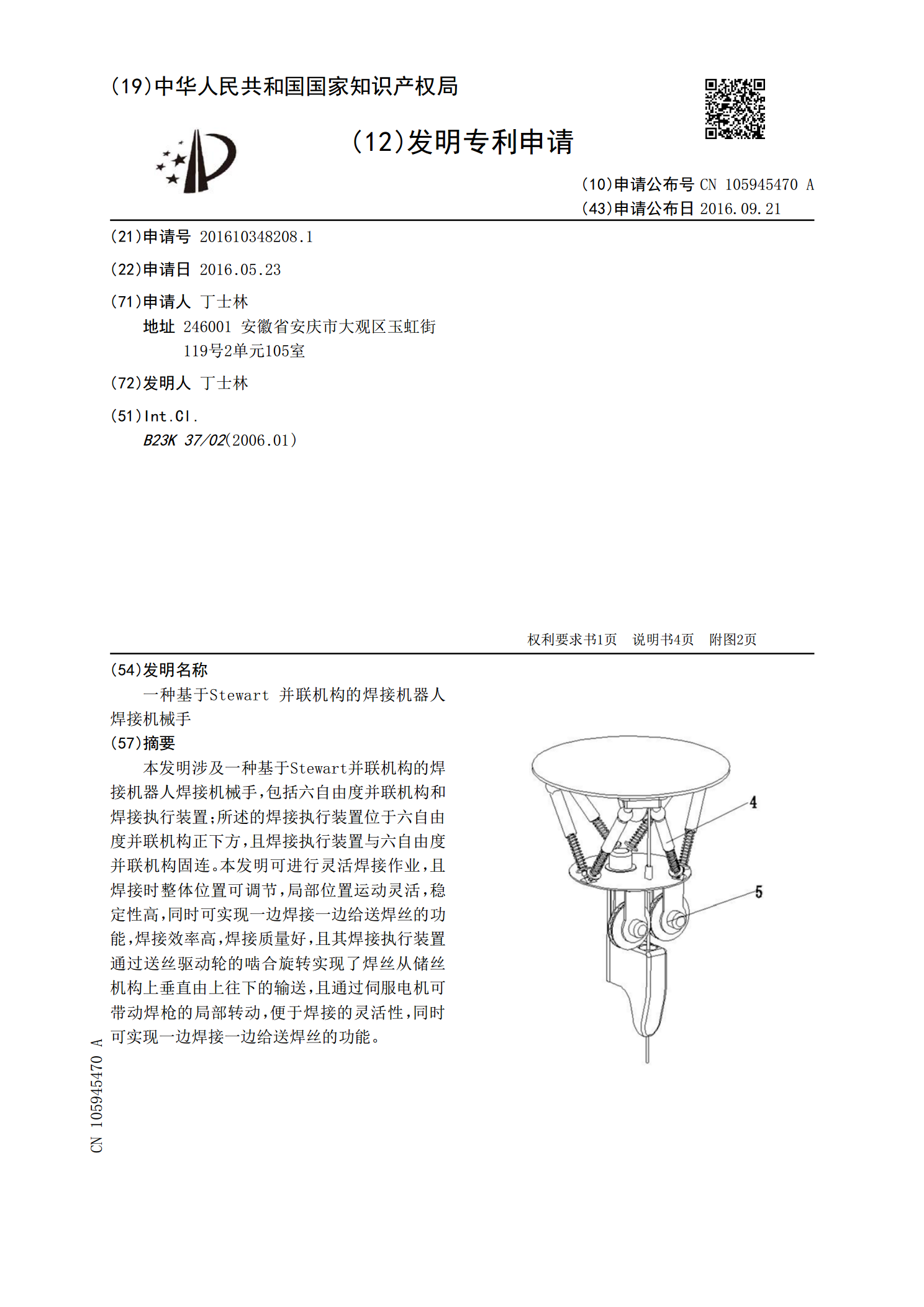
本发明涉及一种基于Stewart并联机构的焊接机器人焊接机械手,包括六自由度并联机构和焊接执行装置;所述的焊接执行装置位于六自由度并联机构正下方,且焊接执行装置与六自由度并联机构固连。本发明可进行灵活焊接作业,且焊接时整体位置可调节,局部位置运动灵活,稳定性高,同时可实现一边焊接一边给送焊丝的功能,焊接效率高,焊接质量好,且其焊接执行装置通过送丝驱动轮的啮合旋转实现了焊丝从储丝机构上垂直由上往下的输送,且通过伺服电机可带动焊枪的局部转动,便于焊接的灵活性,同时可实现一边焊接一边给送焊丝的功能。

一种连续体并联抓取机器人的设计与研究.docx
一种连续体并联抓取机器人的设计与研究论文标题:一种连续体并联抓取机器人的设计与研究摘要:连续体并联抓取机器人作为一种新兴的机器人系统,具有较大的自由度和灵活性,并且能够在复杂环境中进行高精度的抓取任务。本论文以一种连续体并联抓取机器人为研究对象,通过详细分析机器人的设计原理和结构,探索了其动力学模型和控制算法的设计方法。通过仿真实验和实际抓取任务的验证,验证了该机器人在抓取任务中的高效性和可靠性。关键词:连续体并联抓取机器人、设计原理、动力学模型、控制算法、抓取任务1.引言连续体并联抓取机器人作为一种新型