
用于识别和控制三维物体打印机中的Z轴打印头位置的系统和方法.pdf

努力****爱敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于识别和控制三维物体打印机中的Z轴打印头位置的系统和方法.pdf
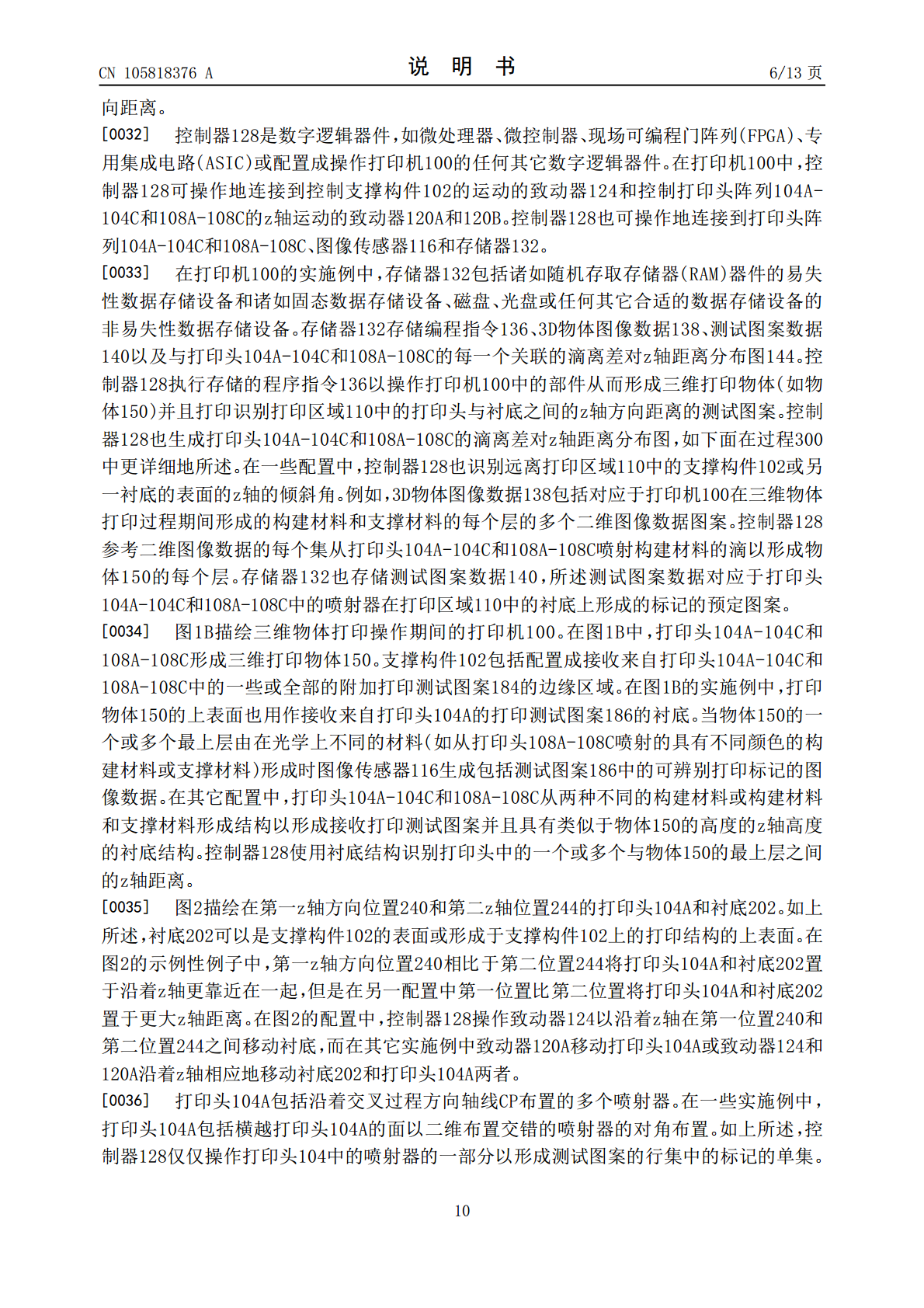
本发明提供一种操作三维物体打印机的方法,所述方法包括用打印头中的多个喷射器在打印机中的衬底上生成预定打印测试图案。图像传感器生成打印测试图案的图像数据并且控制器参考分离测试图案中的打印标记的交叉过程方向距离之间的识别离差识别打印头与接收测试图案的衬底之间的z轴距离。

用于在具有固定打印头阵列的直达物体打印机中调节打印头操作的系统和方法.pdf
一种直达物体打印机包括多个成像装置,所述多个成像装置在保持器和物体经过用于在物体上打印墨图像的多个打印头之前生成固定在保持器中的物体的图像数据。控制器接收图像数据并且将其转换成物体轮廓。控制器参考物体轮廓操作打印头中的喷射器以减弱不一致的墨图像密度和墨图像失真。
用于三维物体的打印机中的不工作喷墨器检测的系统和方法.pdf
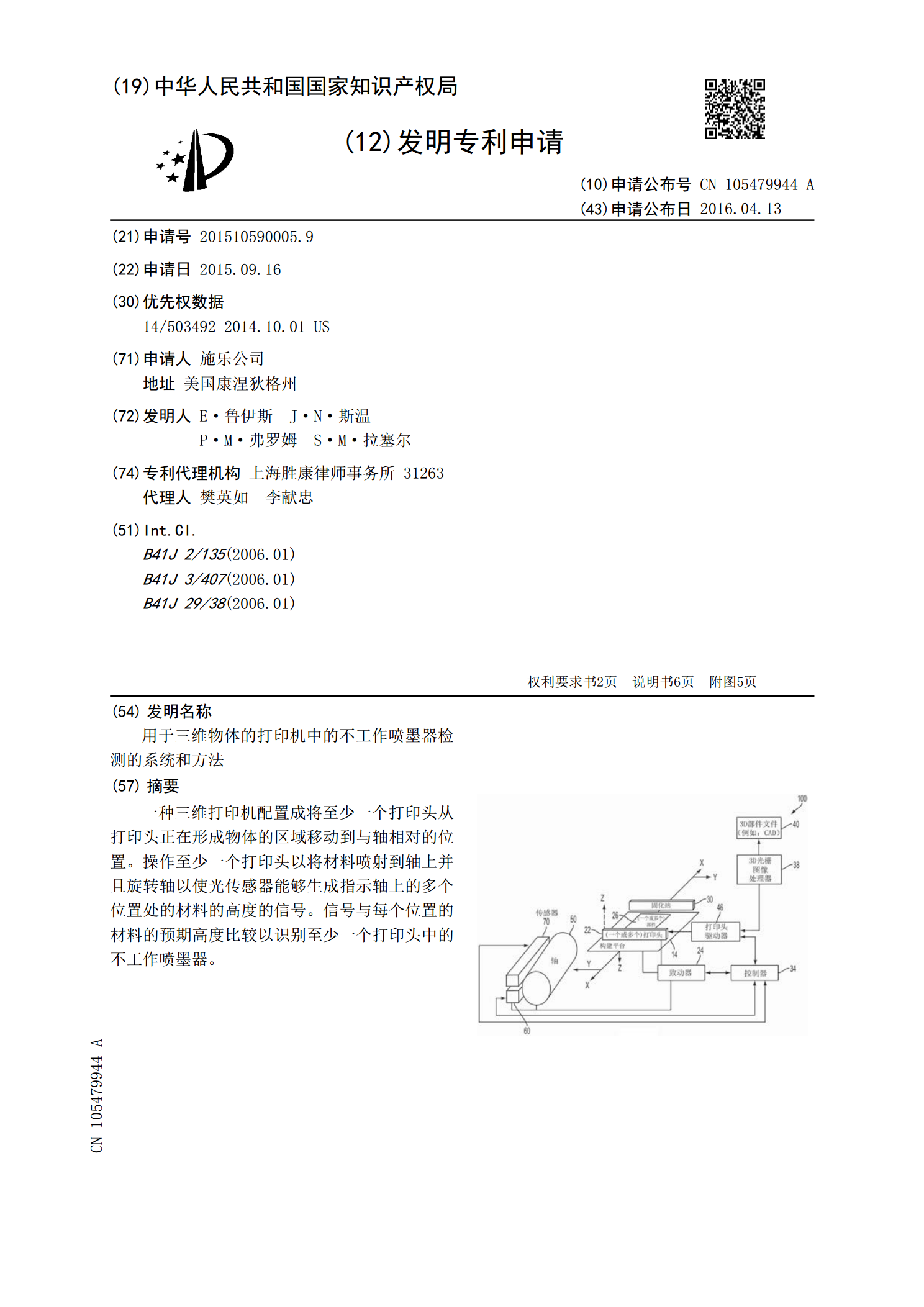
一种三维打印机配置成将至少一个打印头从打印头正在形成物体的区域移动到与轴相对的位置。操作至少一个打印头以将材料喷射到轴上并且旋转轴以使光传感器能够生成指示轴上的多个位置处的材料的高度的信号。信号与每个位置的材料的预期高度比较以识别至少一个打印头中的不工作喷墨器。
用于三维物体打印机的挤出打印头.pdf
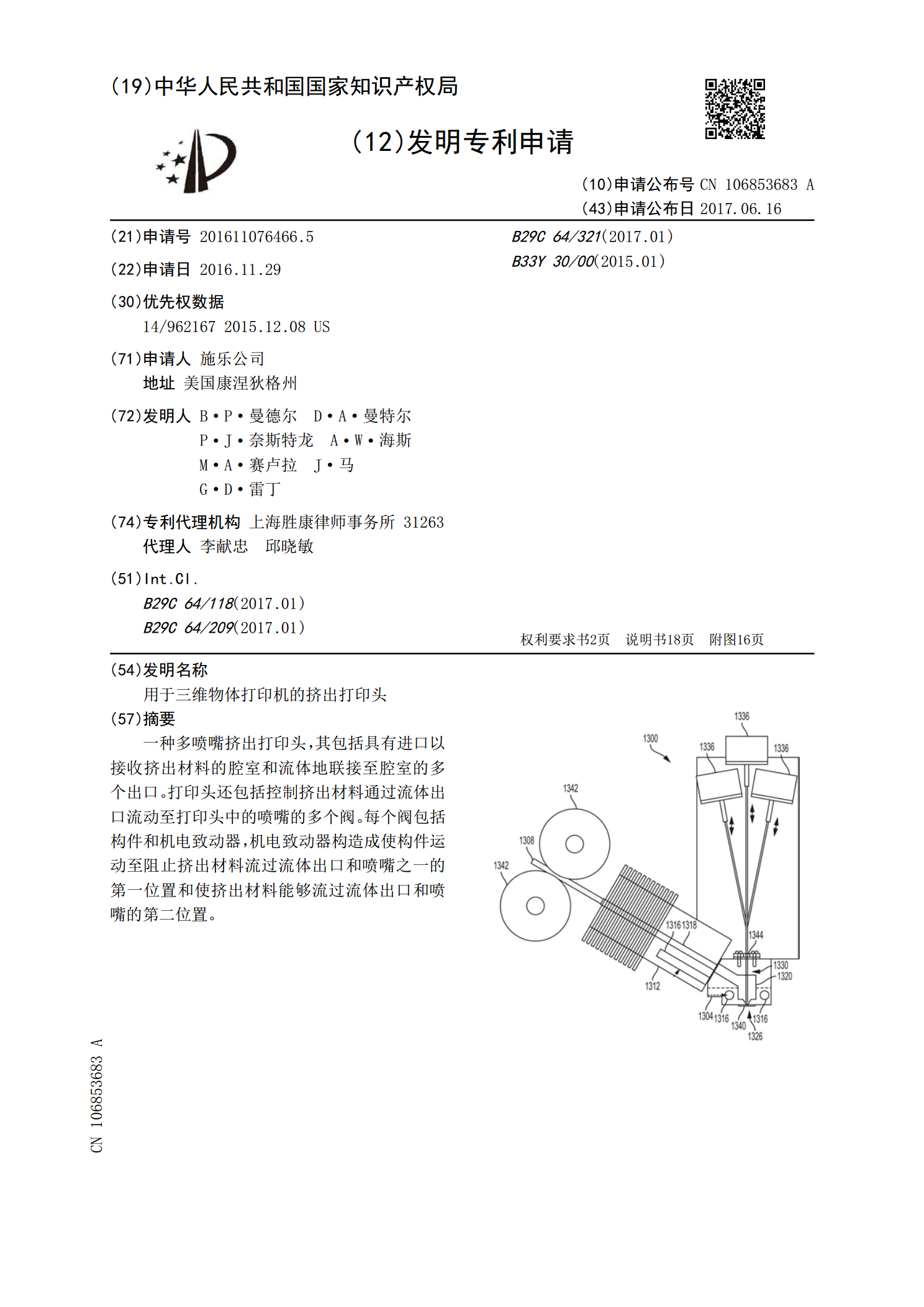
一种多喷嘴挤出打印头,其包括具有进口以接收挤出材料的腔室和流体地联接至腔室的多个出口。打印头还包括控制挤出材料通过流体出口流动至打印头中的喷嘴的多个阀。每个阀包括构件和机电致动器,机电致动器构造成使构件运动至阻止挤出材料流过流体出口和喷嘴之一的第一位置和使挤出材料能够流过流体出口和喷嘴的第二位置。

用于控制三维物体打印中的材料滴体积的系统和方法.pdf
一种用于控制三维物体打印中的材料滴体积的系统和方法。本发明提供一种打印机,其使用闭环控制将由打印头喷射的材料滴保持在预定范围内。打印机在支撑构件上形成至少两个物体并且然后操作镜面传感器阵列以获得支撑构件上的两个物体的图像数据。两个物体具有不同的预定高度以使打印机中的控制器能够识别形成物体的材料滴的质量或体积,从而调节打印机的操作参数以将材料滴的质量或体积保持在预定范围内。