
一种延迟振镜动作的激光打标系统及激光打标方法.pdf

雨巷****彦峰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种延迟振镜动作的激光打标系统及激光打标方法.pdf
一种延迟振镜动作的激光打标系统及激光打标方法。该系统包括用于产生激光的激光器以及依次设置在激光器所产生激光的光路上的动态聚镜模块、X振镜和Y振镜;还包括控制模块以及分别与控制模块相连的第一驱动模块、第二驱动模块和第三驱动模块;控制模块和第一驱动模块之间以及控制模块和第二驱动模块之间还设有延迟模块,延迟模块用于接收控制模块发送的第一控制信号和第二控制信号,同步对第一控制信号和第二控制信号进行延迟,并将延迟后的第一控制信号发送至第一驱动模块,将延迟后的第二控制信号发送至第二驱动模块。本申请使得动态聚焦镜模块和

激光打标方法和激光打标系统.pdf
本发明涉及用激光在提供有激光感应区域的基板上激光打标的方法。所述激光感应区域适于在达到阈值能量水平(T)时被激活,该方法包括如下步骤:通过供能元件辐射整个激光感应区域给激光感应区域供能,并且将所述激光感应区域的一部分暴露在所述激光辐射中,其中该供能元件设置为发射集中在特定波长的辐射,并且其中辐射的结合导致能量超过所述阈值能量水平(T),从而在组合的辐射发生部分激光感应区域被激活。本发明也涉及到激光打标系统的实施方法。

激光打标方法及激光打标设备和系统.pdf
本发明涉及一种激光打标方法及激光打标设备和系统,上述激光打标方法包括如下步骤:产品输送线上载有多个顺序排列的产品,所述产品输送线带动多个产品运动;第一激光头对所述产品输送线上的一个产品进行打标,同时,第二激光头对所述产品线上的另一个产品进行打标,同时打标的两个产品相邻或相隔偶数个产品;所述第一激光头对一个产品打标完成后,再对与该产品相隔一个产品的另一个产品进行打标;所述第二激光头对一个产品打标完成后,再对与该产品相隔一个产品的另一个产品进行打标。使得产品输送线带的运行速度可以提升一倍,因此打标速度可以提升
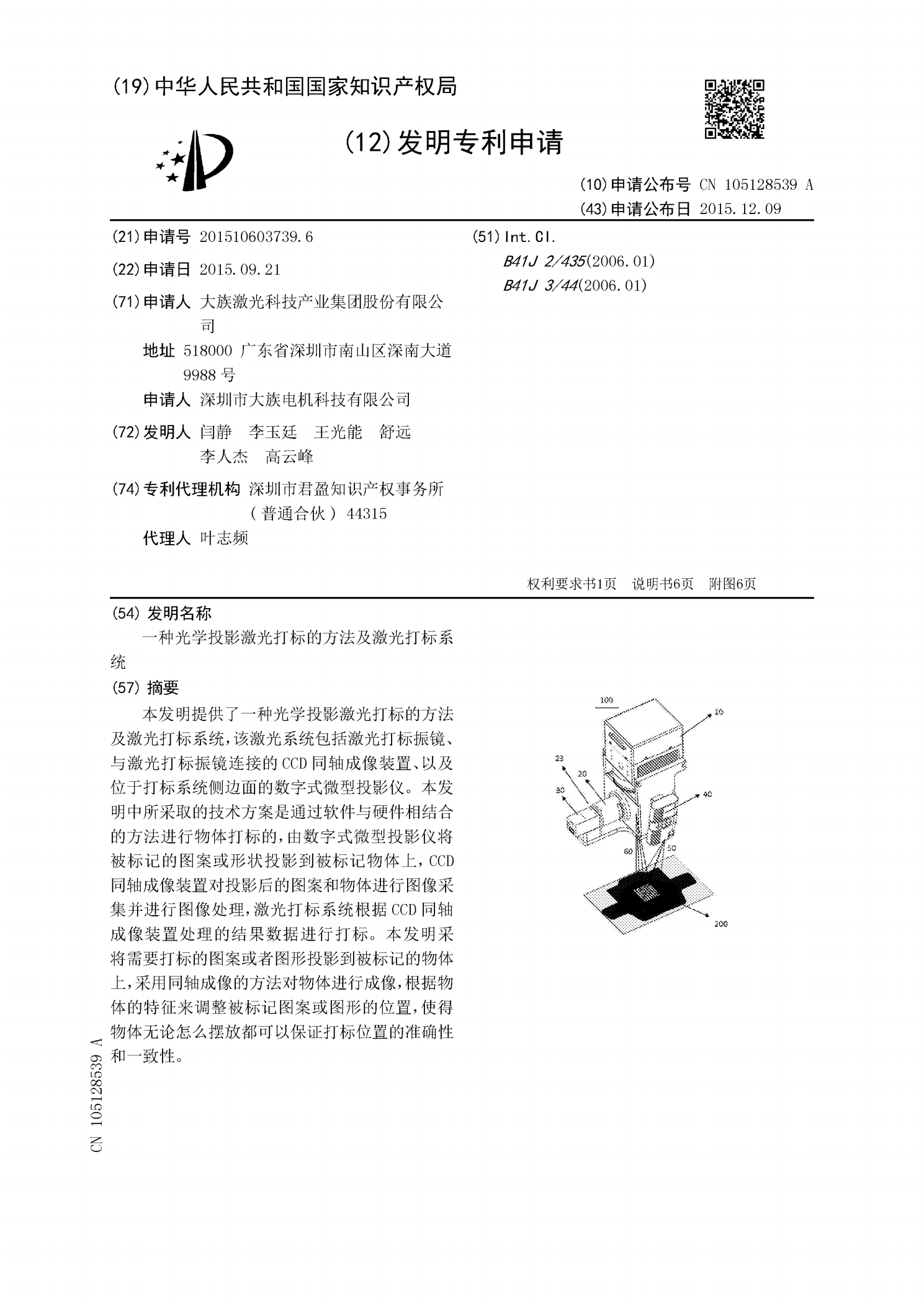
一种光学投影激光打标的方法及激光打标系统.pdf
本发明提供了一种光学投影激光打标的方法及激光打标系统,该激光系统包括激光打标振镜、与激光打标振镜连接的CCD同轴成像装置、以及位于打标系统侧边面的数字式微型投影仪。本发明中所采取的技术方案是通过软件与硬件相结合的方法进行物体打标的,由数字式微型投影仪将被标记的图案或形状投影到被标记物体上,CCD同轴成像装置对投影后的图案和物体进行图像采集并进行图像处理,激光打标系统根据CCD同轴成像装置处理的结果数据进行打标。本发明采将需要打标的图案或者图形投影到被标记的物体上,采用同轴成像的方法对物体进行成像,根据物体
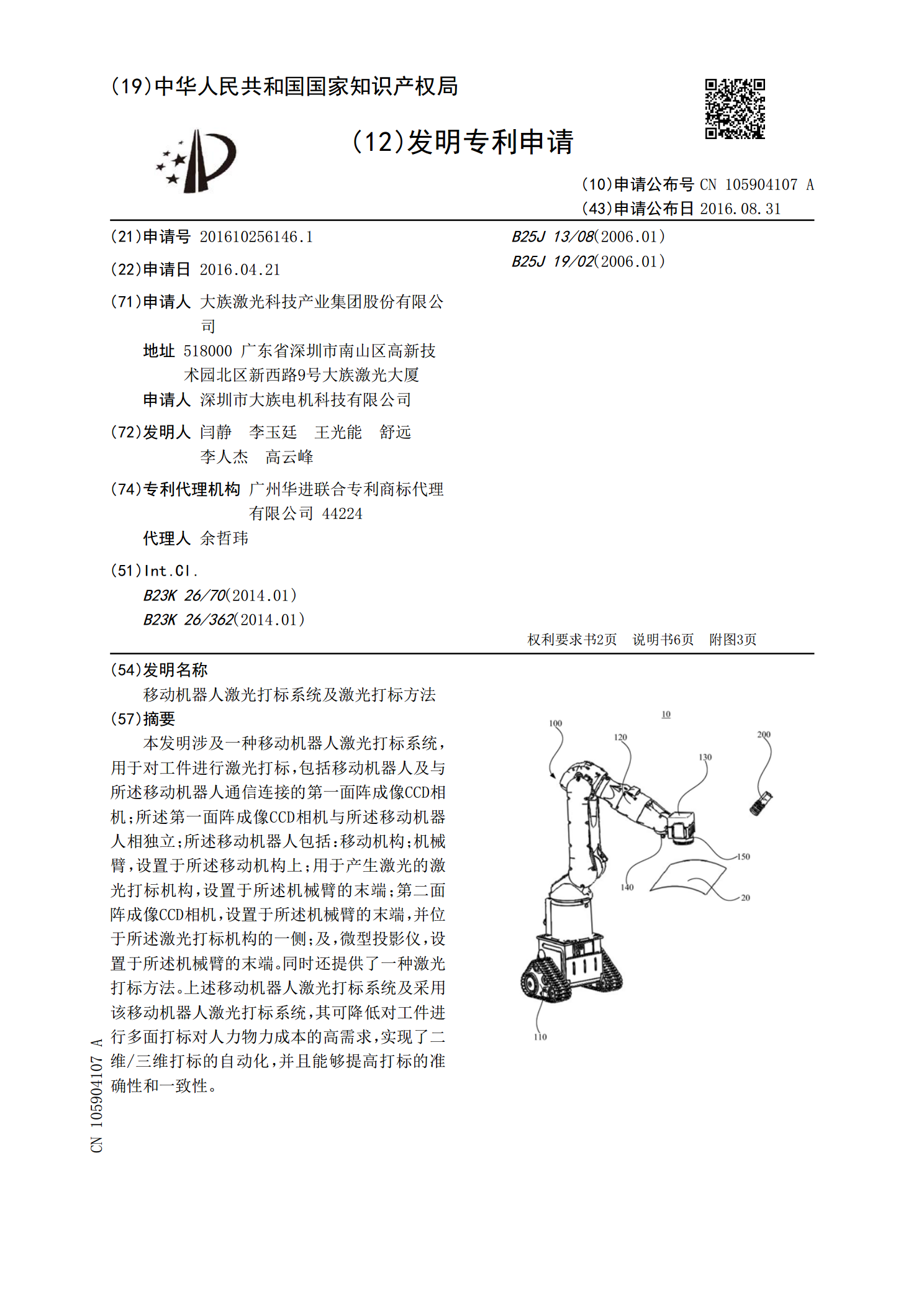
移动机器人激光打标系统及激光打标方法.pdf
本发明涉及一种移动机器人激光打标系统,用于对工件进行激光打标,包括移动机器人及与所述移动机器人通信连接的第一面阵成像CCD相机;所述第一面阵成像CCD相机与所述移动机器人相独立;所述移动机器人包括:移动机构;机械臂,设置于所述移动机构上;用于产生激光的激光打标机构,设置于所述机械臂的末端;第二面阵成像CCD相机,设置于所述机械臂的末端,并位于所述激光打标机构的一侧;及,微型投影仪,设置于所述机械臂的末端。同时还提供了一种激光打标方法。上述移动机器人激光打标系统及采用该移动机器人激光打标系统,其可降低对工件