
一种手势识别方法及装置.pdf

静芙****可爱


1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种手势识别方法及装置.pdf
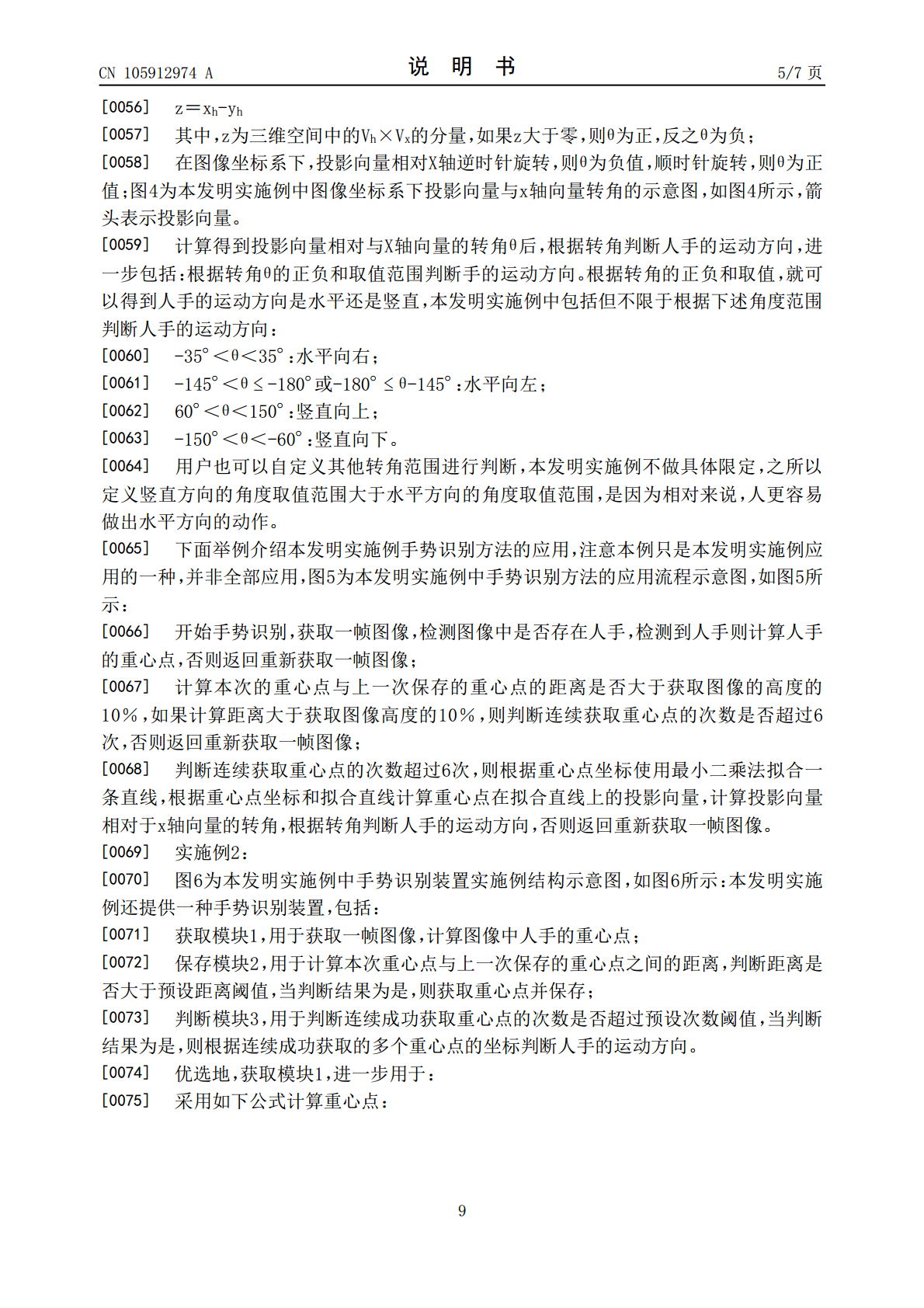
本发明实施例提供一种手势识别方法及装置,手势识别方法,包括如下步骤:获取一帧图像,计算所述图像中所述人手的重心点;计算本次所述重心点与上一次保存的重心点之间的距离,判断所述距离是否大于预设距离阈值,当判断结果为是,则获取所述重心点并保存;判断连续成功获取所述重心点的次数是否超过预设次数阈值,当判断结果为是,则根据连续成功获取的多个所述重心点的坐标判断所述人手的运动方向,相应地,本发明实施例还提供了一种手势识别的装置,根据本发明实施例提供的技术方案,可以快速判断人手的运动方向,抗干扰性强,识别精度高,在人手
一种手势识别方法及装置.pdf
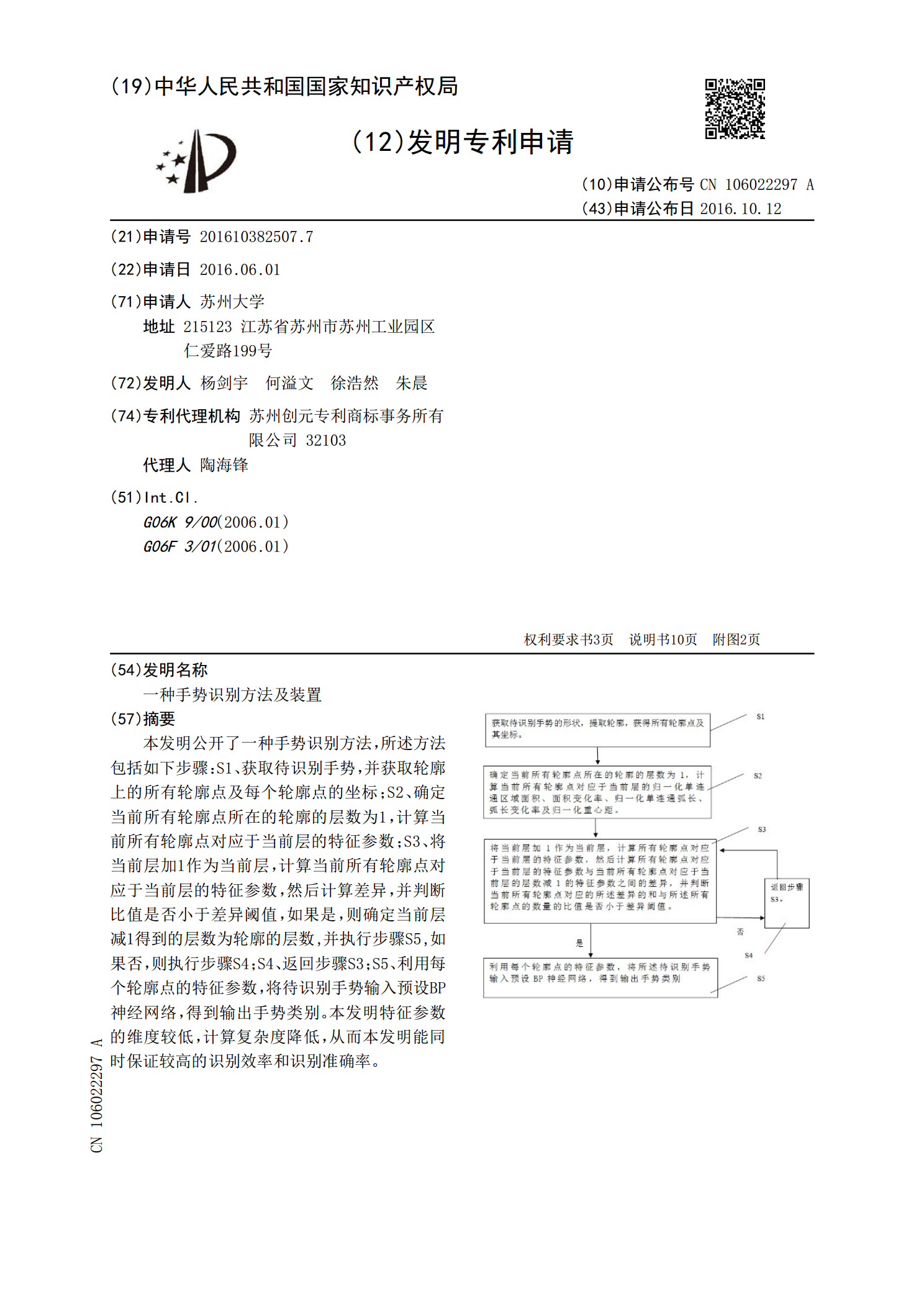
本发明公开了一种手势识别方法,所述方法包括如下步骤:S1、获取待识别手势,并获取轮廓上的所有轮廓点及每个轮廓点的坐标;S2、确定当前所有轮廓点所在的轮廓的层数为1,计算当前所有轮廓点对应于当前层的特征参数;S3、将当前层加1作为当前层,计算当前所有轮廓点对应于当前层的特征参数,然后计算差异,并判断比值是否小于差异阈值,如果是,则确定当前层减1得到的层数为轮廓的层数,并执行步骤S5,如果否,则执行步骤S4;S4、返回步骤S3;S5、利用每个轮廓点的特征参数,将待识别手势输入预设BP神经网络,得到输出手势类别
一种手势识别方法及装置.pdf
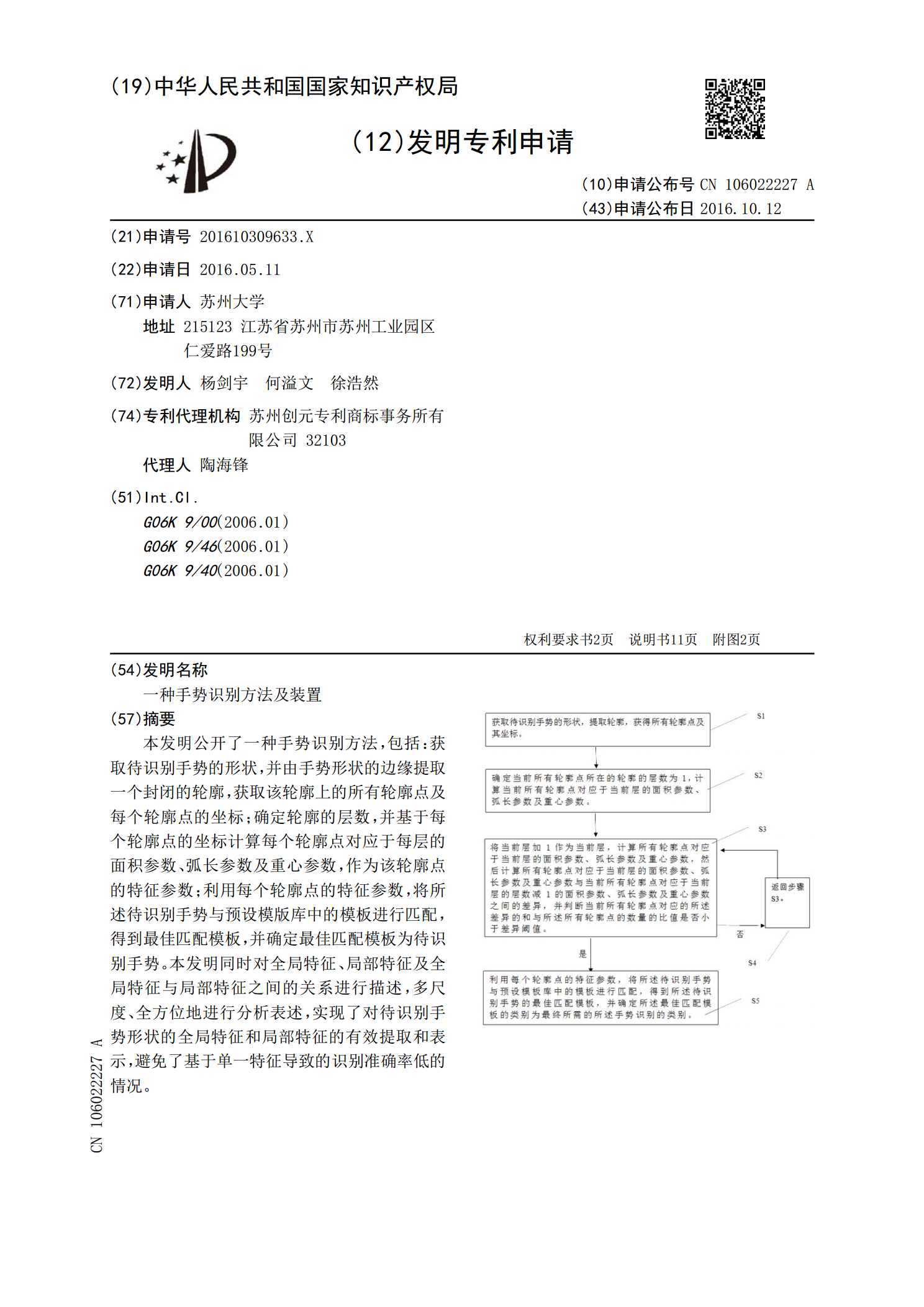
本发明公开了一种手势识别方法,包括:获取待识别手势的形状,并由手势形状的边缘提取一个封闭的轮廓,获取该轮廓上的所有轮廓点及每个轮廓点的坐标;确定轮廓的层数,并基于每个轮廓点的坐标计算每个轮廓点对应于每层的面积参数、弧长参数及重心参数,作为该轮廓点的特征参数;利用每个轮廓点的特征参数,将所述待识别手势与预设模版库中的模板进行匹配,得到最佳匹配模板,并确定最佳匹配模板为待识别手势。本发明同时对全局特征、局部特征及全局特征与局部特征之间的关系进行描述,多尺度、全方位地进行分析表述,实现了对待识别手势形状的全局特

手势识别方法及装置.pdf
本发明公开了一种手势识别方法,捕捉常见的人体基本动作并存储为样本动作;根据所述样本动作得到最终的训练动作;对训练动作进行图形渲染生成初步的深度图及相应部位标识图;根据所生成的深度图合成与实时采集的深度图相似的样本;利用合成样本计算对应深度特征向量,训练得到随机森林模型;通过基于平滑度约束的区域生长提取精确深度人像轮廓;基于随机森林模型计算深度人像轮廓的每个像素的深度特征向量,通过随机森林模型确定每个像素的部位标识概率;基于每个像素对应的人体部位及其概率,滤除识别噪点,聚合生成骨架节点;记录骨架节点的时序序
一种手势识别方法、装置、设备及介质.pdf
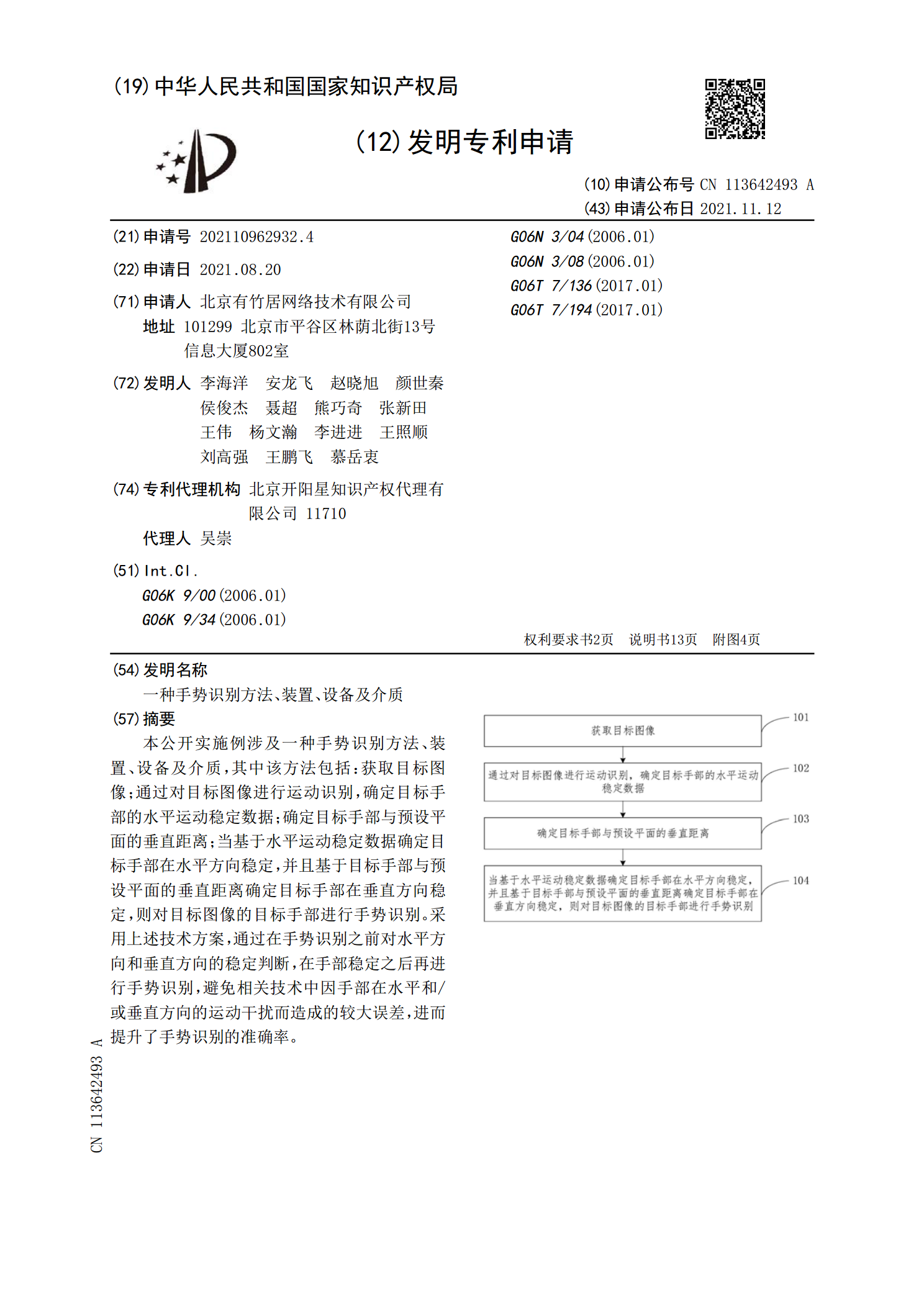
本公开实施例涉及一种手势识别方法、装置、设备及介质,其中该方法包括:获取目标图像;通过对目标图像进行运动识别,确定目标手部的水平运动稳定数据;确定目标手部与预设平面的垂直距离;当基于水平运动稳定数据确定目标手部在水平方向稳定,并且基于目标手部与预设平面的垂直距离确定目标手部在垂直方向稳定,则对目标图像的目标手部进行手势识别。采用上述技术方案,通过在手势识别之前对水平方向和垂直方向的稳定判断,在手部稳定之后再进行手势识别,避免相关技术中因手部在水平和/或垂直方向的运动干扰而造成的较大误差,进而提升了手势识别