
一种校准定位基站坐标系的方法和定位校准装置.pdf

雨巷****珺琦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种校准定位基站坐标系的方法和定位校准装置.pdf
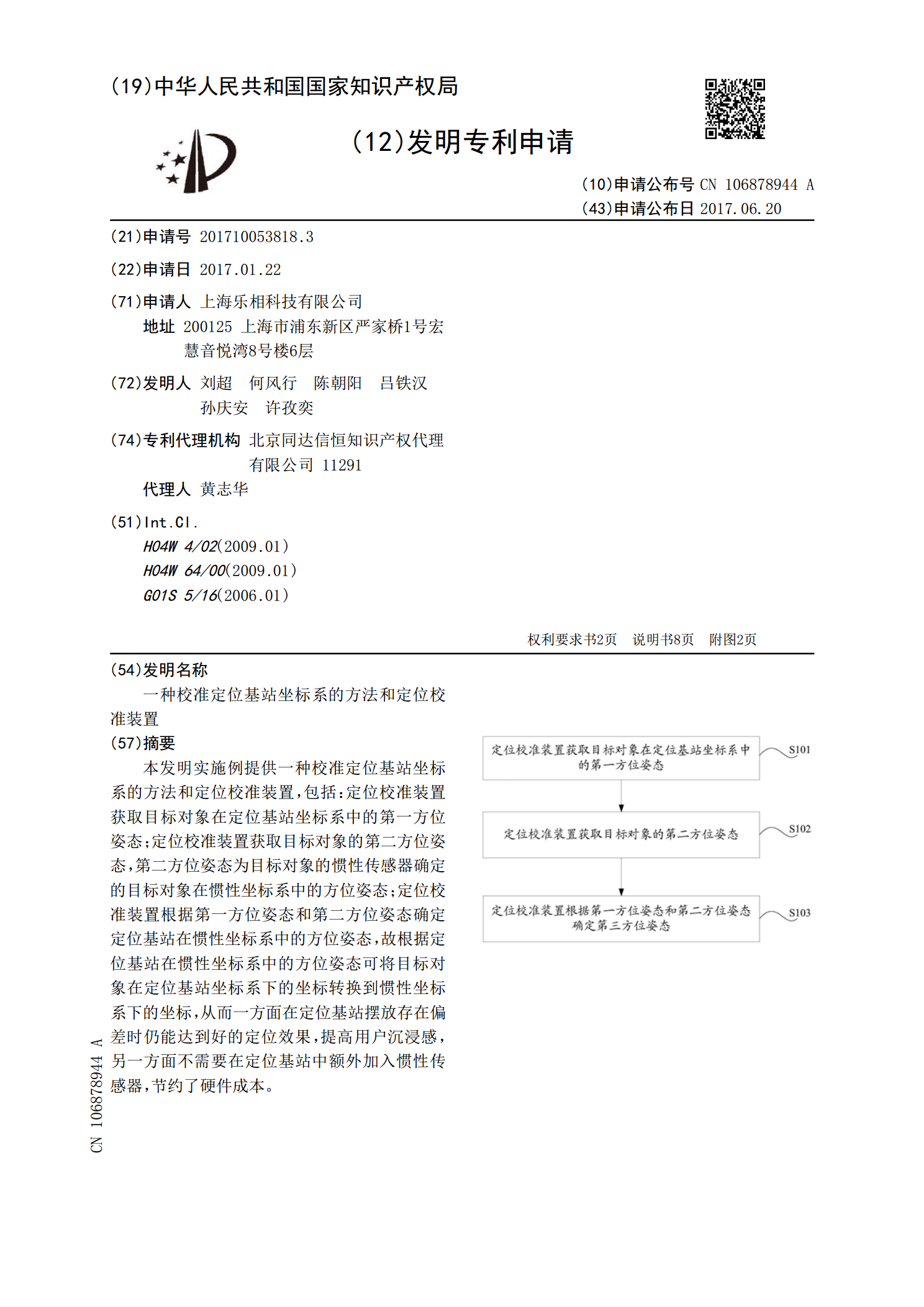
本发明实施例提供一种校准定位基站坐标系的方法和定位校准装置,包括:定位校准装置获取目标对象在定位基站坐标系中的第一方位姿态;定位校准装置获取目标对象的第二方位姿态,第二方位姿态为目标对象的惯性传感器确定的目标对象在惯性坐标系中的方位姿态;定位校准装置根据第一方位姿态和第二方位姿态确定定位基站在惯性坐标系中的方位姿态,故根据定位基站在惯性坐标系中的方位姿态可将目标对象在定位基站坐标系下的坐标转换到惯性坐标系下的坐标,从而一方面在定位基站摆放存在偏差时仍能达到好的定位效果,提高用户沉浸感,另一方面不需要在定位

一种校准定位基站坐标系的方法及装置.pdf
本发明提供一种校准定位基站坐标系的方法及装置,方法包括:根据目标设备上的同一激光接收模块在定位基站坐标系下的N个第一坐标,确定定位基站在惯性坐标系下的第一姿态;其中,N个第一坐标为所述目标设备在N个校正位置点定位得到的坐标,N个校正位置点在惯性坐标系中具有相同的Z轴坐标,N大于等于3;根据目标设备在定位基站坐标系下的第一姿态和所述目标设备在惯性坐标系下的姿态,确定所述定位基站在惯性坐标系下的第二姿态;根据所述定位基站在惯性坐标系下的第一姿态和所述定位基站在惯性坐标系下的第二姿态,确定所述定位基站在惯性坐标

一种校准定位基站坐标系的方法及装置.pdf
本申请实施例涉及激光和电子技术领域,尤其涉及一种校准定位基站坐标系的方法及装置。服务器获取第一定位基站的第一倾斜角和第二定位基站的第二倾斜角,根据第一定位基站接收的第二定位基站的激光信号,确定第一定位基站在第二定位基站的局部坐标系中的第一位置,根据第二定位基站接收的第一定位基站的激光信号,确定第二定位基站在第一定位基站的局部坐标系中的第二位置,根据第一倾斜角、第二倾斜角、第一位置和第二位置,将第一定位基站的局部坐标系及第二定位基站的局部坐标系转换为第一预设坐标系。如此,服务器可以将该系统中的多个定位基站都

一种统一定位基站坐标系的方法和定位校准装置.pdf
本发明实施例提供一种统一定位基站坐标系的方法和定位校准装置,定位校准装置获取至少三个激光接收模块同一时刻在第一定位基站的坐标系下的第一坐标和在第二定位基站坐标系下的第二坐标,然后以第一定位基站为基准,定位校准装置根据至少三个激光接收模块在第一定位基站坐标系下的第一坐标和第二定位基站坐标系下的第二坐标确定第二定位基站在第一定位基站坐标系中的方位姿态。根据第二定位基站在第一定位基站坐标系中的方位姿态可将目标对象在两个坐标系中的坐标统一,从而一方面避免了同一个目标先后被两个不同的定位基站监测到时,目标的定位出现

一种校准定位基站坐标系的方法及装置.pdf
本发明提供一种校准定位基站坐标系的方法及装置,适用于区域内包括至少一个定位基站的系统;包括:校准装置根据定位基站的第一姿态参数,确定第一转换矩阵;校准装置确定定位模块在第一转换矩阵下的第一矢量;定位模块为位于同一目标设备上且在同一时刻被定位基站扫描到的至少两个激光接收模块;校准装置通过目标设备的姿态确定定位模块在世界坐标系下的第二矢量;校准装置根据第一矢量和第二矢量,确定定位基站的第二转换矩阵;第二转换矩阵对应定位基站的第二姿态参数;校准装置根据第一转换矩阵和第二转换矩阵,确定定位基站在世界坐标系下的第三